 GraniStudio:单轴PTP运动例程
GraniStudio:单轴PTP运动例程

1.文件运行
导入工程
双击运行桌面GraniStudio.exe。

通过引导界面导入单轴PTP运动例程,点击导入按钮。

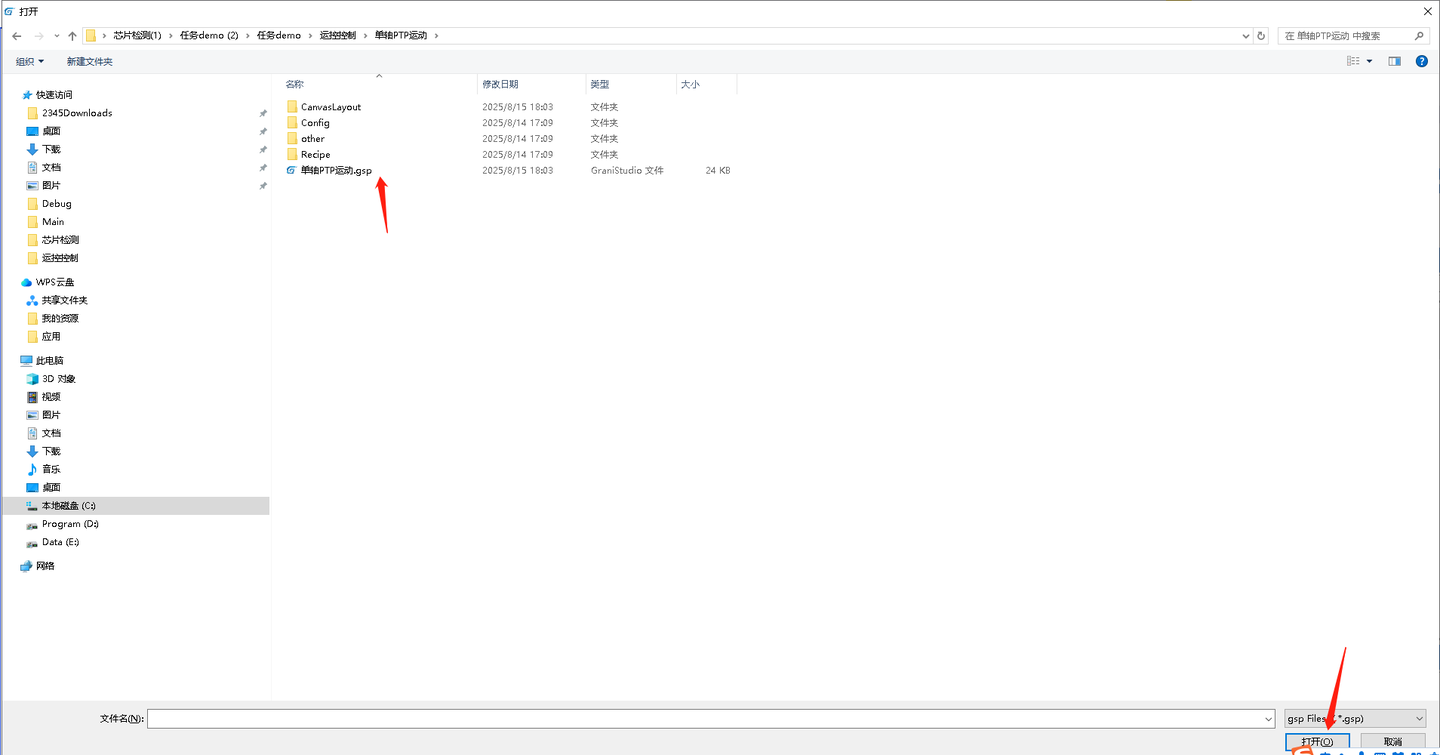
打开单轴PTP运动例程所在路径,选中单轴PTP运动.gsp文件,点击打开,完成导入。
2.功能说明
实现轴1复位、单轴以相对运动模式走10毫米以及绝对运动走10毫米。
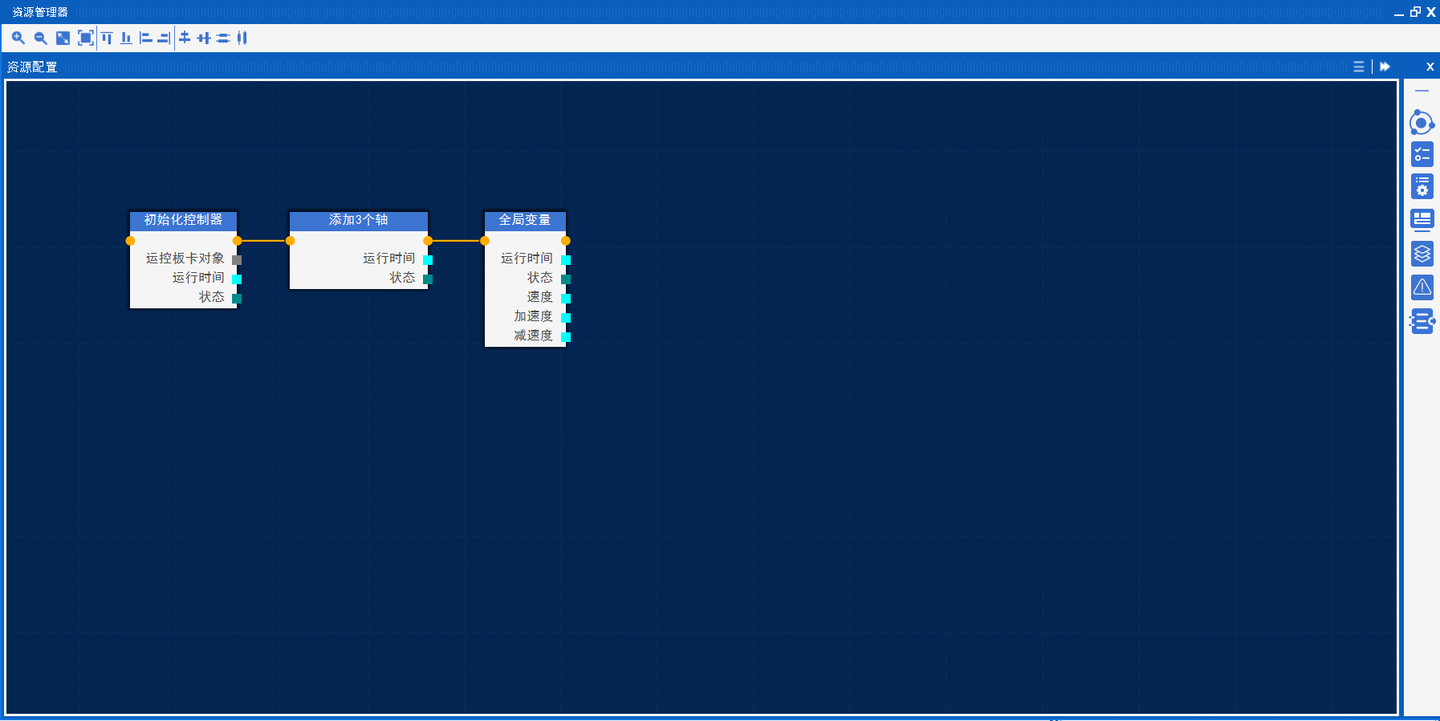
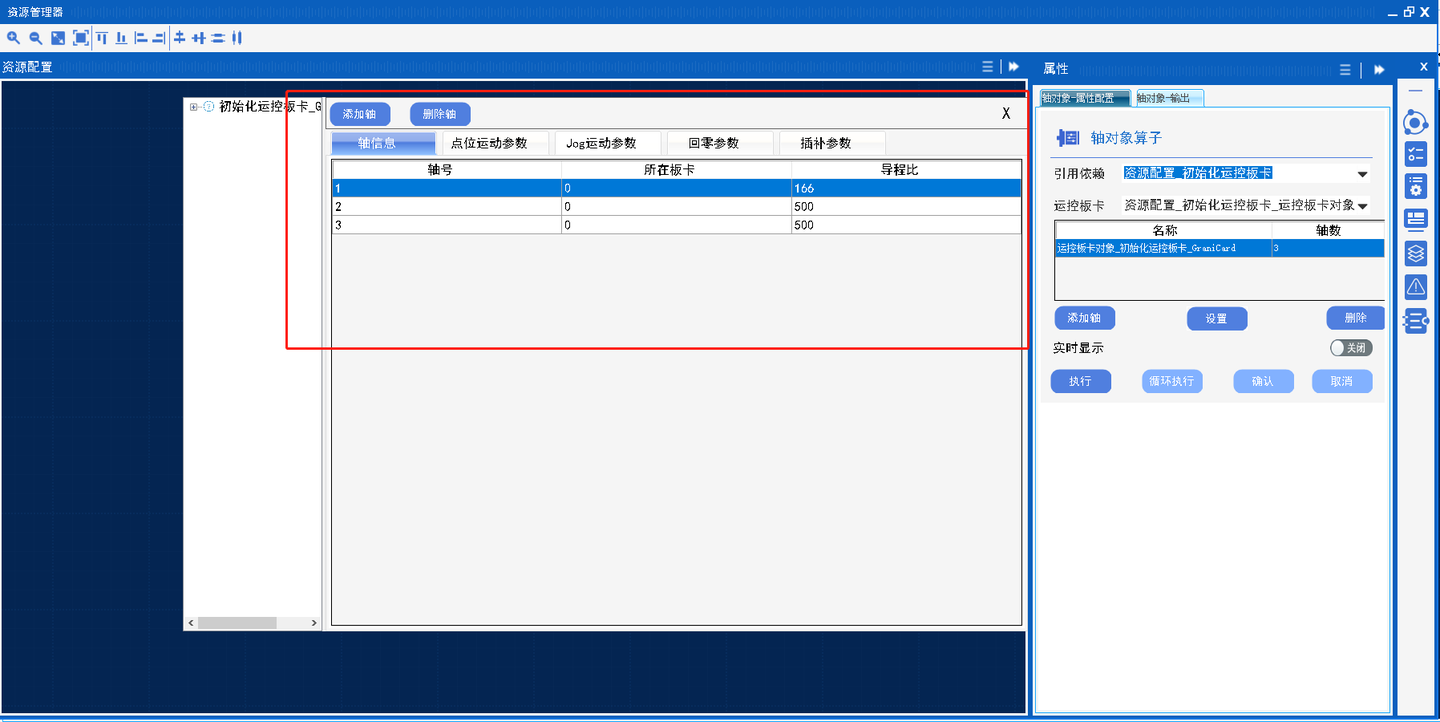
2.1通过初始化运控板卡算子连接格拉尼总线型运控卡,导入工程自动进行连接,此算子为使用运控控制板卡的第一项操作,后续运控算子需引用其输出板卡对象才可使用。
2.2通过轴对象算子增加控制轴数量以及配置每个轴的初始参数,如轴导程比等参数,注意因为轴对象算子是为运控板卡对象中添加控制轴数,所以轴对象算子需引用运控板卡对象,轴对象算子需在初始化运控板卡算子后使用。
2.3使用全局变量定义速度参数与HMI进行交互。
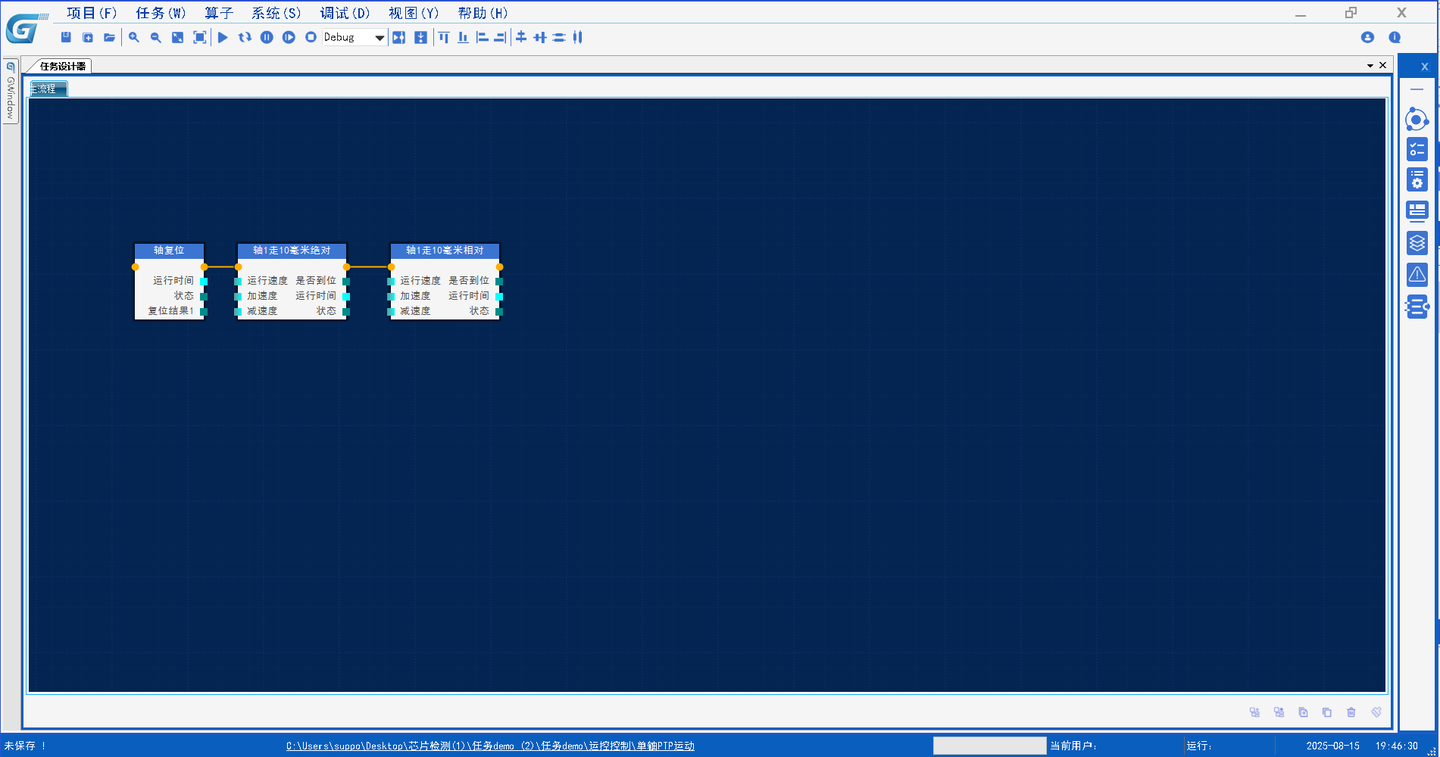
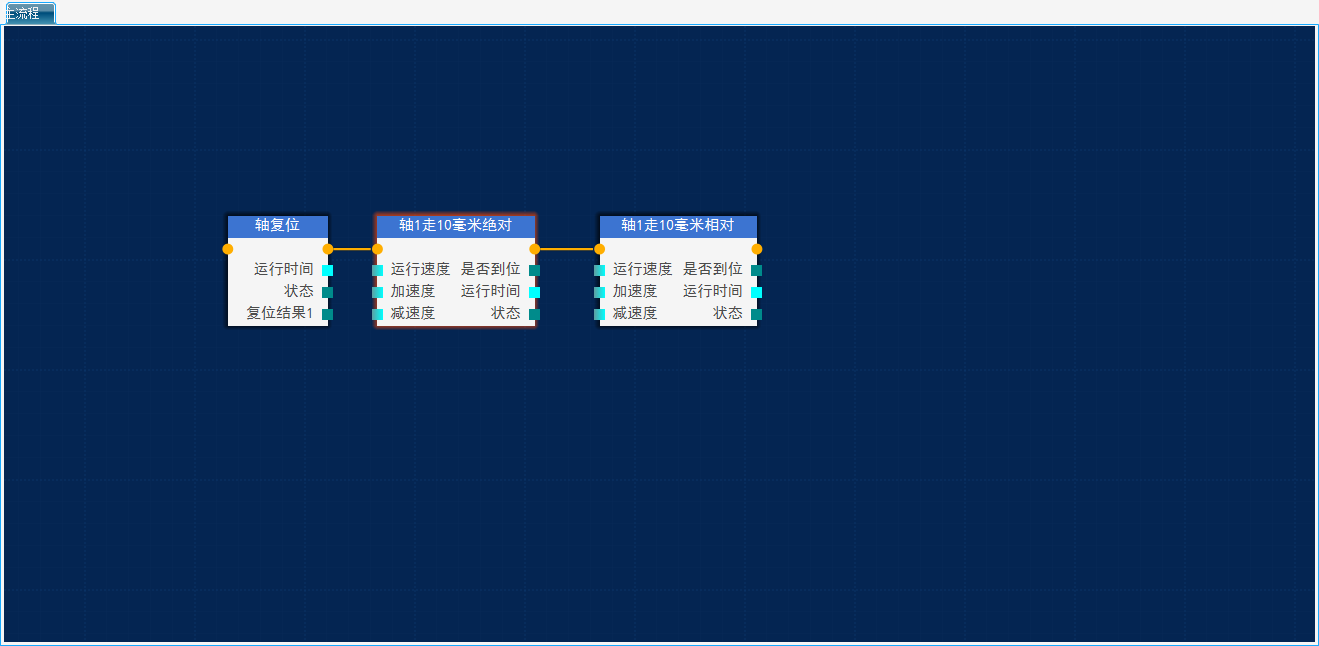
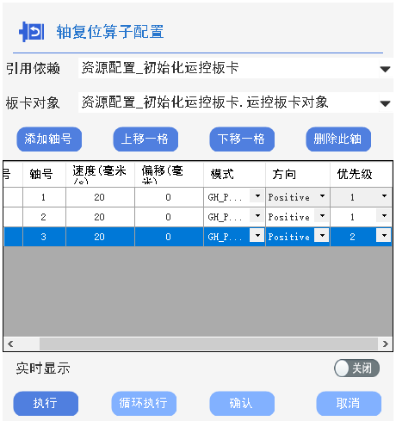
2.4使用轴复位算子以20毫米每秒速度控制轴1往负方向回零,使用轴自动算子实现轴1相对10毫米以及绝对10毫米。
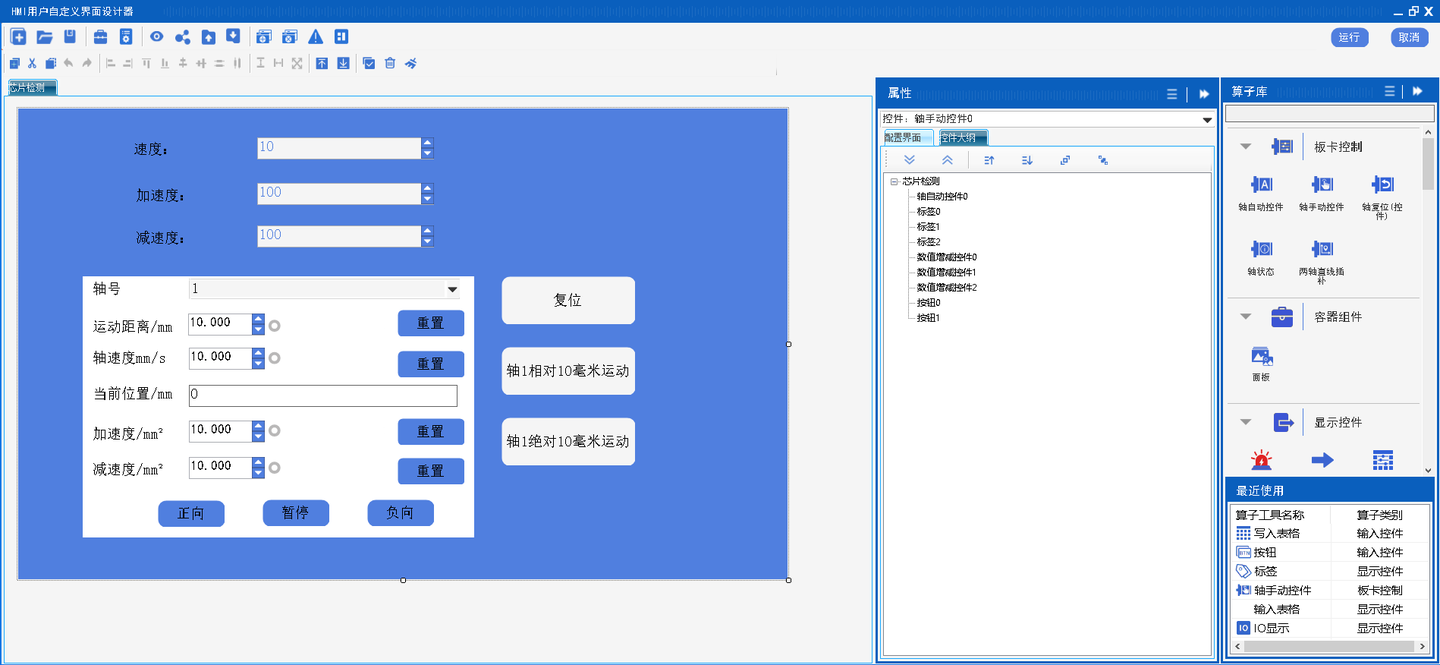
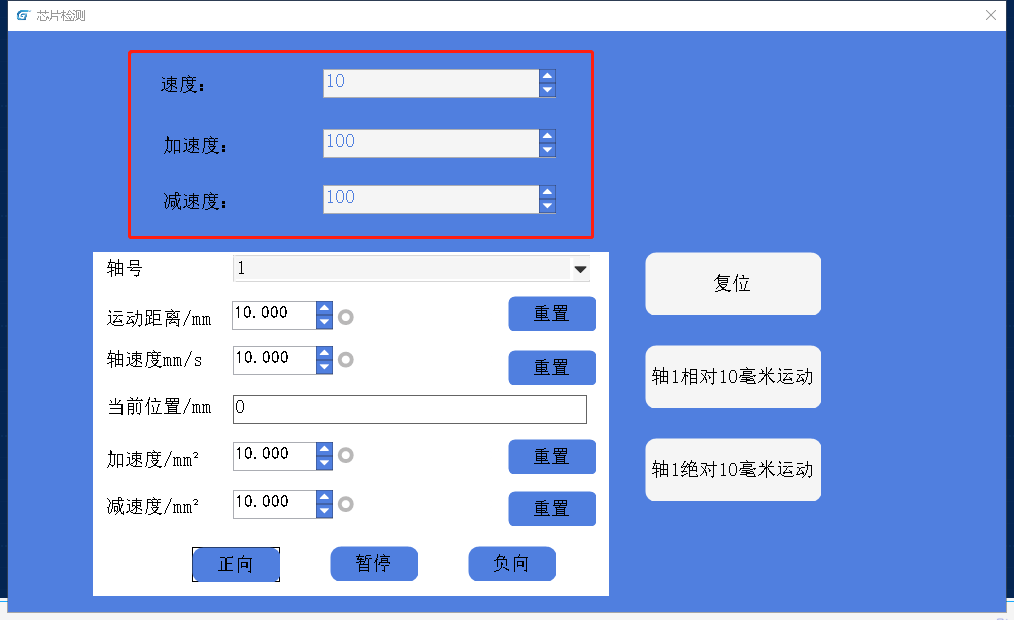
2.5 运行HMI,在此区域内调节轴点动的速度、加速度与减速度。
点击复位按钮,执行主流程的复位算子控制轴1复位。
点击轴1相对10毫米运动按钮,执行主流程的命名为轴1走10毫米相对算子,控制轴1相对运动10毫米。
点击轴1绝对10毫米运动按钮,执行主流程的命名为轴1走10毫米绝对算子,控制轴1移动到10毫米位置。
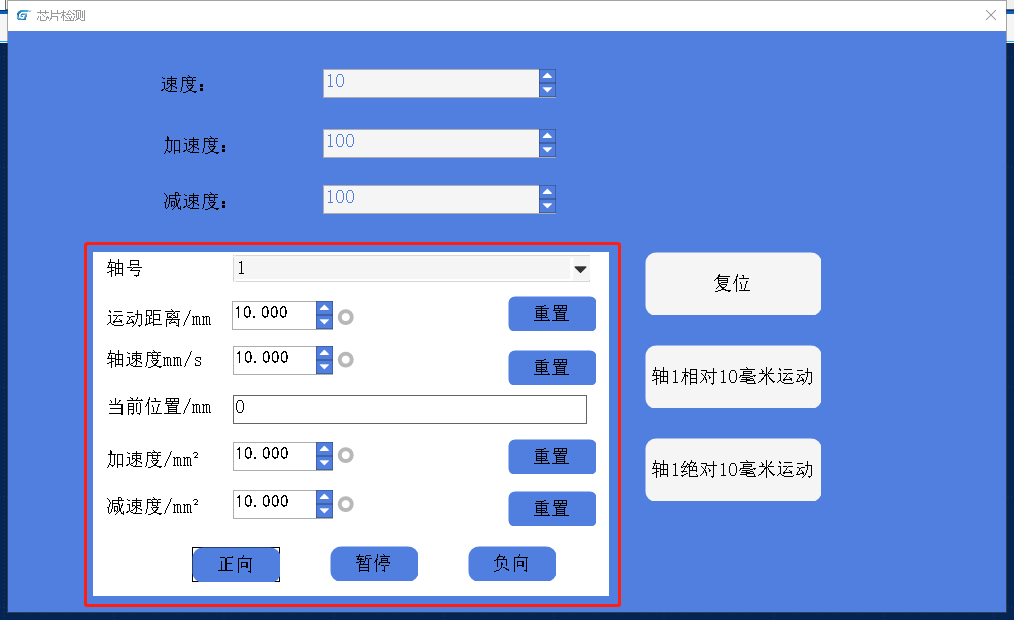
HMI提供轴自动控件,方便实现单点控制,点击正向按钮控制轴1往正方向移动10毫米,点击负向按钮控制轴1往负方向移动10毫米。
3.异常处理
当控制轴做点到点实际轴未运动时:
查看轴是否处于使能状态并查看驱动器是否存在报警,存在报警可手动执行一遍资源管理器中的初始化运控板卡与轴对象算子,执行会重新连接运控板卡,通常会清楚轴报警,如果还存在报警可通过断驱动器电再上电,查看驱动器报警状态,未报警再执行一遍资源算子进行重连即可;
检查正负限位开关是否被误触发。
审核编辑 黄宇
-
PTP
+关注
关注
0文章
82浏览量
9214
发布评论请先 登录
GraniStudio:视觉和运控例程

GraniStudio:相机标定例程

GraniStudio:IO写入例程

GraniStudio:初始化例程

GraniStudio:单轴Jog运动例程

GraniStudio:获取轴信息例程

GraniStudio:控制轴设置例程

GraniStudio:两轴直线插补例程

GraniStudio:轴复位例程

GraniStudio零代码平台轴复位算子支持多少个轴同时复位,有哪些回零模式?
运动控制轴和单轴控制区别怎么选?工业自动化工程师一文讲透!

直线模组选型指南:单轴直线模组VS多轴直线模组








 工商网监
工商网监
评论