 舵机是什么?
舵机是什么?

舵机是什么?
舵机是一种高精度的位置伺服执行机构,主要用于控制机械结构的角度或位置,广泛应用于需要精确转动控制的场景。它通过接收控制信号(通常是脉冲信号)来驱动输出轴转动到指定角度,并能在负载变化时保持稳定的位置,具备结构紧凑、响应迅速、控制简单等特点。
一、舵机的基本构成
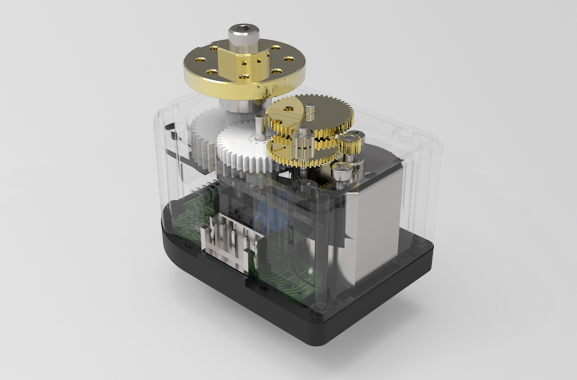
舵机的核心结构通常包括以下几个关键部分:
直流电机:提供动力输出,是舵机的 “动力源”。
减速齿轮组:由多个齿轮组成,用于降低电机转速并增大扭矩,使输出轴能带动更大负载。
位置反馈装置:最常见的是电位器(部分高端舵机使用编码器),用于实时检测输出轴的当前角度,并将信号反馈给控制电路。
控制电路:接收外部控制信号(如 PWM 脉冲),对比反馈的当前角度与目标角度,通过调整电机驱动信号实现精准定位。
二、舵机的工作原理
舵机的控制依赖脉冲宽度调制(PWM)信号,其核心逻辑是通过脉冲宽度对应目标角度:
控制信号输入:外部控制器(如单片机、遥控器)发送周期固定(通常为 20ms)的 PWM 脉冲。
脉冲宽度与角度对应:
标准舵机中,脉冲宽度为1.5ms时,输出轴指向中间位置(通常是 90°);
脉冲宽度减小到1.0ms时,输出轴转动到最小角度(通常是 0°);
脉冲宽度增大到2.0ms时,输出轴转动到最大角度(通常是 180°)。
闭环控制调节:控制电路通过位置反馈装置检测当前角度,与 PWM 信号对应的目标角度对比,驱动电机正转或反转,直到两者一致后停止。
三、舵机的主要类型
根据不同的应用需求,舵机可分为多种类型:
按转动角度范围:
标准舵机:最常见,转动角度为 0°-180°,适用于机械臂、舵面控制等;
连续旋转舵机:无角度限制,可 360° 连续转动,通过脉冲宽度控制转速和方向(类似电机调速)。
按尺寸与扭矩:
微型舵机:体积小(如 9g 舵机),扭矩低,适用于小型机器人、航模玩具;
标准舵机:中等尺寸(如 20g-50g),扭矩适中,广泛用于无人机、机械结构;
大扭矩舵机:体积较大(如 100g 以上),扭矩可达数十公斤?厘米,适用于重型机械臂、工业设备。
按性能:
模拟舵机:响应速度较慢,成本低,适合对精度要求不高的场景;
数字舵机:采用更高频率的控制信号(如 300Hz),响应更快、定位更精准、抗干扰能力强,常用于高端设备。
四、舵机的应用领域
舵机凭借精准的角度控制能力,在多个领域发挥重要作用:
机器人技术:机械臂关节转动、机器人行走关节控制、夹持器开合等;
航模与无人机:飞机舵面(升降舵、方向舵)、无人机云台稳定、多旋翼姿态调整;
工业自动化:小型流水线机械臂、精密仪器定位机构;
教育与创客: Arduino/Raspberry Pi 项目、DIY 机器人、科普实验装置。
五、使用舵机的注意事项
电源电压:不同舵机有特定工作电压(如 4.8V-6V),电压不足会导致扭矩下降或定位不准,过高则可能烧毁电路;
负载限制:避免超过舵机额定扭矩,否则会导致齿轮损坏或电机过热;
信号干扰:PWM 信号易受电磁干扰,需注意接线屏蔽或缩短信号线长度;
安装固定:舵机工作时会产生振动,需牢固固定,避免因松动影响定位精度。
总之,舵机是一种将电信号转化为精确机械动作的核心部件,其闭环控制特性使其成为需要精准位置控制场景的理想选择。
审核编辑 黄宇
-
舵机
+关注
关注
17文章
309浏览量
42135
发布评论请先 登录
舵机的原理
舵机如何控制?
PWM 型号舵机控制方法!
舵机是如何运行的(1)?
智能舵机:AI融合下的自动化新纪元

舵机精准定位背后的秘密
舵机与伺服电机有的区别

舵机与电动机的比较分析
舵机在自动化设备中的应用
舵机的类型及其特点
舵机与伺服电机的区别
舵机的工作原理和应用
探索科技前沿,领略舵机技术的无限魅力
舵机在无人机中的应用






 工商网监
工商网监
评论