 舵机是如何运行的(1)?
舵机是如何运行的(1)?

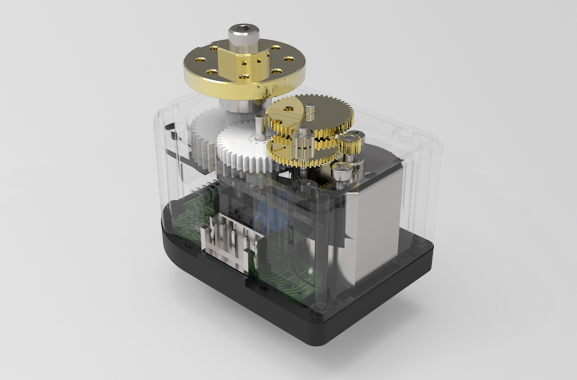
一、舵机的核心结构:四大部件缺一不可
舵机的运行依赖于内部精密协作的机械和电子组件,典型结构包括以下四部分:
1. 驱动单元:提供动力的 “心脏”
有刷电机 / 无刷电机:作为动力源,将电能转化为机械能(转动)。
有刷电机:结构简单、成本低,但高速运行时发热明显,寿命较短(约 1000-3000 小时)。
无刷电机:采用电子换向技术,发热低、效率高、寿命长(可达 10000 小时以上),常见于高端舵机。
2. 减速机构:放大扭矩 + 降低转速
电机直接输出的转速高但扭矩小,无法满足负载需求,因此需要通过齿轮组减速:
常见齿轮材质:塑料齿轮(轻量低价)、金属齿轮(高强度耐造)。
减速比:通常为 1:100~1:300,即电机转动 100-300 圈,输出轴转动 1 圈,扭矩随之成比例放大。
3. 位置检测单元:精准 “感知” 角度的 “神经”
电位器(可变电阻):最常用的检测元件,与输出轴机械连接。当输出轴转动时,电位器电阻值变化,通过电路转化为电压信号,反映当前角度位置(如 0° 对应 0.5V,180° 对应 2.5V)。
4. 控制电路:指挥运行的 “大脑”
核心是专用伺服控制芯片,功能包括:
接收外部控制信号(PWM 信号);
对比当前位置信号(来自电位器)与目标位置信号;
驱动电机正转 / 反转,直到当前位置与目标位置一致。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
舵机
+关注
关注
17文章
309浏览量
42137
发布评论请先 登录
相关推荐
热点推荐
舵机的原理
一、舵机控制的核心原理 舵机内部集成了 直流电机、减速齿轮组、电位器(角度传感器)和控制电路 ,形成闭环控制系统: ? 信号接收 :外部输入 PWM 信号,控制电路解析信号中的脉冲宽度,确定目标角度
舵机如何控制?
舵机是一种高精度的角度控制执行器,广泛应用于机器人、遥控模型、自动化设备等场景。其控制核心是通过 PWM(脉冲宽度调制)信号 调节角度,配合内部闭环反馈实现精准定位。以下从原理、控制方式、关键参数
PWM 型号舵机控制方法!
一、PWM 舵机控制原理 PWM 舵机的核心是 脉冲宽度与旋转角度的对应关系 : 舵机接收周期性的 PWM 信号(通常周期为 20ms,即频率 50Hz),信号由高电平(有效电平)和低电平组成
智能舵机:AI融合下的自动化新纪元
在自动化的浪潮中,智能舵机以其独特的魅力和卓越的性能,正引领着自动化产业迈向新的高度。今天,让我们一起走进智能舵机的世界,感受AI技术为其带来的无限可能。 一、智能舵机:自适应控制的先锋 智能

舵机精准定位背后的秘密
从精密的机器人关节到广阔的工业生产线,从灵活的无人机飞行到精细的医疗手术器械,舵机的身影无处不在,默默推动着自动化技术的飞速发展。那么,舵机究竟是如何实现其精准定位的呢?这背后隐藏着怎样的技术秘密
舵机与伺服电机有的区别
? ? ? 舵机和伺服电机在自动化和机器人技术领域中都是常用的执行器,它们都能够实现精确的位置控制,但二者之间存在一些基本的区别,具体如下: ? ? ? 一、定义与构成 ? ? ? 1. 舵机

舵机与电动机的比较分析
在自动化和机器人技术领域,电机是实现精确控制和动力输出的关键组件。舵机和电动机是两种常见的电机类型,它们各自有着独特的应用场景和性能特点。 1. 工作原理 1.1 舵机 舵机,也称为伺
舵机在自动化设备中的应用
在现代工业自动化领域,精确控制是提高生产效率和产品质量的关键。舵机作为一种高精度的执行元件,被广泛应用于各种自动化设备中,从简单的机器人手臂到复杂的自动化生产线,舵机的身影无处不在。 舵机的基本原理
舵机的类型及其特点
舵机,也称为伺服电机,是一种能够将输入信号转换为精确角度或位置输出的电机。它们广泛应用于机器人、遥控模型、自动化设备等领域。 舵机的类型及其特点 1. 直流舵机(DC Servo Mo
舵机与伺服电机的区别
它们的性能和适用性。 1. 定义和工作原理 1.1 舵机 舵机是一种带有反馈机制的电机,它能够将输入信号转换为精确的角位移。舵机通常包含一个电机、一个减速齿轮、一个位置传感器(如电位计
舵机的工作原理和应用
舵机是一种在自动控制系统中广泛应用的执行元件,它能够将电信号转换为机械运动,从而实现对物体位置的精确控制。 1. 舵机的工作原理 舵机主要由以下几个部分组成:电机、减速齿轮组、位置反馈
探索科技前沿,领略舵机技术的无限魅力
智能设备正以其独特的魅力改变着我们的生活。从翱翔天际的无人机,到灵活摆动的机器人,再到精密运作的自动化设备,它们的背后都有一个共同的关键部件——舵机。舵机,作为连接动力与执行的核心,其性能的提升
舵机在无人机中的应用
?一、舵机工作原理舵机是一种位置(角度)伺服的驱动器,由电子控制与机械控制部分组成。当控制信号输入时,电子控制部分会根据控制器的指令调节直流电机输出的旋转角度和速度,由机械部分转化为控制面的位移以及

ESP32控制舵机的正反转原理是什么
舵机是一种将电信号转换为机械运动的设备,广泛应用于机器人、无人机、汽车等领域。ESP32是一款功能强大的微控制器,具有丰富的外设接口和高性能的处理能力,可以方便地控制舵机实现正反转等动作。本文将介绍





 工商网监
工商网监
评论