 E14机器人安全加入光电及升降门信号分析
E14机器人安全加入光电及升降门信号分析

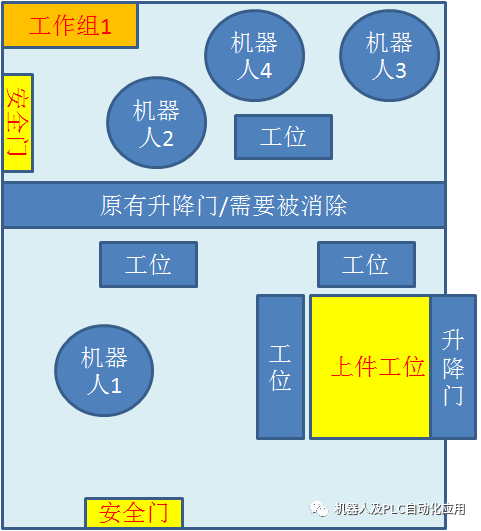
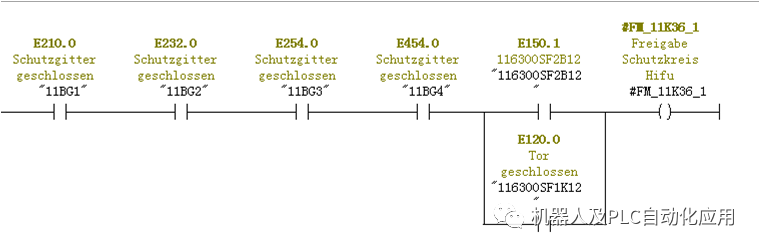
原始程序布局状态
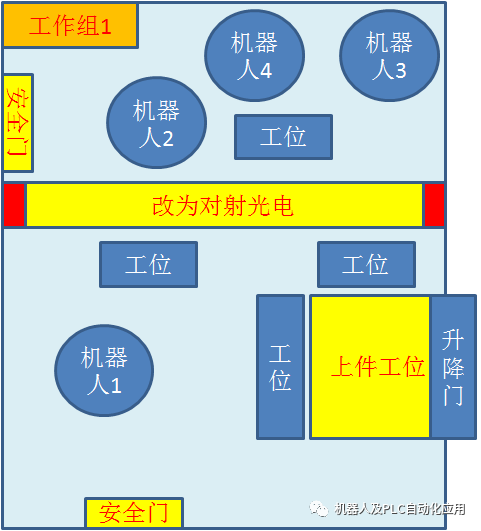
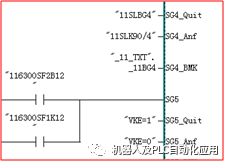
改进后的布局状态:
1.将机器人E14机器人安全加入光电及升降门信号.
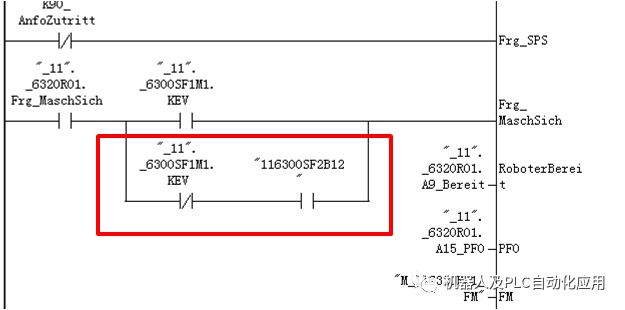
2.机器人安全门回路加入光电和升降门信号.
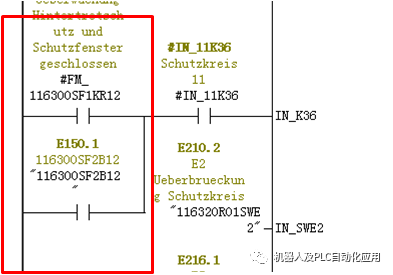
3.误闯光电会引起工作组1报安全门故障.
1.将机器人E14机器人安全加入光电及升降门信号.
编程速度快,改动最小,影响范围小,安全系数低.
2.机器人安全门回路加入光电和升降门信号.
打开升降门后,如果挡光电会引起机器人2号的安全门回路断开,使机器人以安全停止1的方式停止.
相对1的解决方案,这个方案的安全系数更高,完全控制了2 号机器人,但当人员跨过新加光栅后,3号/4号机器人仍然在运动,还是有一定的安全风险.
3.误闯光电会引起工作组1报安全门故障.
并入安全门控制回路,如果开着升降门直接闯过光栅,将使整个工作组1停止产生安全门开故障.
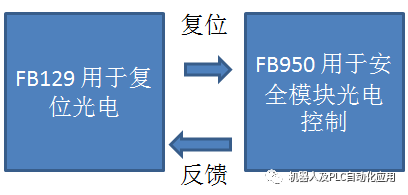
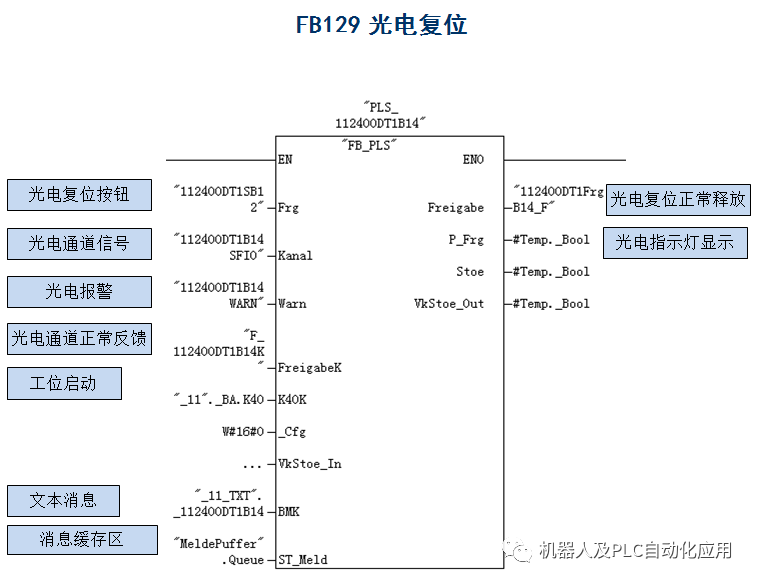
光电复位示意图:
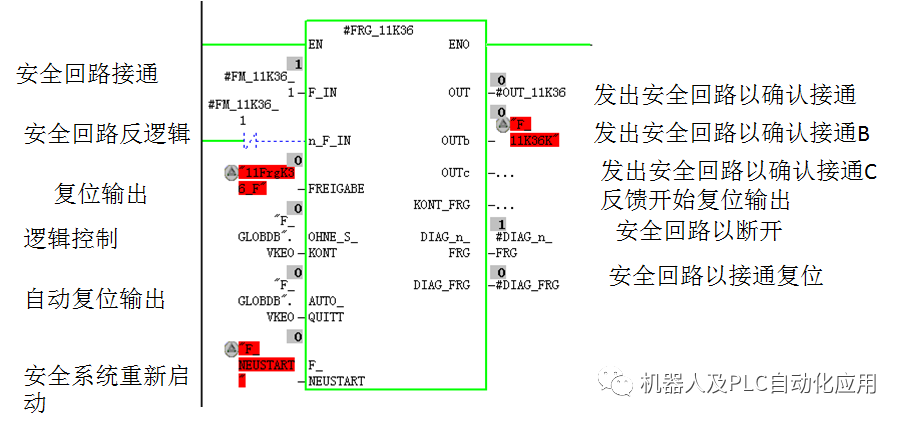
FB950接口设置
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
29939浏览量
214394 -
光栅
+关注
关注
0文章
298浏览量
28060 -
接口设计
+关注
关注
2文章
198浏览量
30362
发布评论请先 登录
相关推荐
热点推荐
ADI安全产品如何简化不同机器人控制系统中安全机制的实现
我们将探讨各种机器人安全用例,展示ADI的安全产品如何简化不同机器人控制系统中安全机制的实现。

ADI解读机器人控制系统中的安全风险和有效安全措施 为机器人技术的未来发展筑牢安全防线
本文探讨了机器人控制系统中的安全风险和有效安全措施。文中介绍了工业安全标准,并分析了满足工业安全

工业机器人的特点
机器人是关键。工业互联网是通过端上的数据传输,经过大数据分析和云计算处理,再进行智能化决策的一整个过程,其中端的数据传输是基础。工业互联网的端包括机器人、传感器等一切线下连接端口。因此发展工业
发表于 07-26 11:22
明远智睿SSD2351开发板:语音机器人领域的变革力量
的四核1.4GHz处理器具备强劲的运算性能,能够高效处理语音机器人运行过程中的复杂任务。语音识别和合成需要大量的计算资源,该处理器可以快速对语音信号进行分析、处理和转换。在实时语音交互场景中,无论是
发表于 05-28 11:36
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
免与行人发生碰撞,为旅客提供安全、舒适的引导服务。
智能交互系统
语音识别与理解 :智能指路机器人利用先进的语音识别技术,将旅客输入的语音信号转化为文字信息。然后,通过自然语言处理算法对文字进行
发表于 05-10 18:26
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
一代的Gazebo机器人仿真平台 ,绝大部分功能和源码可以在单独的计算机和Gazebo仿真平台上运行。
同时,本书介绍 实物机器人的搭建方法,并且在实物机器人上实现相应的功能 。
配套源码都加
发表于 03-03 14:18
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
阅读《具身智能机器人系统》第10-13章,我对具身智能机器人的工程实践有了全新认识。第10章从实时性角度剖析了机器人计算加速问题。机器人定位中的SLAM算法需要处理两个计算密集型任务:
发表于 01-04 01:15
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
近年来,人工智能领域的大模型技术在多个方向上取得了突破性的进展,特别是在机器人控制领域展现出了巨大的潜力。在“具身智能机器人大模型”部分,作者研究并探讨了大模型如何提升机器人的能力,大模型存在
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
现状和前沿研究,详细介绍大模型的构建方法、训练数据、模型架构和优化技术。
第4部分(第10章到第13章)深入探讨提升机器人计算实时性、算法安全性、系统可靠性及具身智能数据挑战的具身智能机器人系统研究
发表于 12-28 21:12
【「具身智能机器人系统」阅读体验】+初品的体验
的快速发展,相关人才的需求也在不断增加,通过阅读该书可以帮助大家系统性地了解和分析当前具身智能机器人系统的发展现状和前沿研究,为未来的研究和开发工作提供指导。此外,本书还可以为研究人员和工程师提供具体
发表于 12-20 19:17
安全光栅在工业机器人上的应用
? ? ? ? 随着现代工业生产的进步,工业机器人越来越受到制造业的关注,应用也越来越广泛。工业机器人安全生产也被广泛关注。那么出现了一系列机器人在操作工程中对






 工商网监
工商网监
评论