 ADI安全产品如何简化不同机器人控制系统中安全机制的实现
ADI安全产品如何简化不同机器人控制系统中安全机制的实现

机器人安全用例与实施:护航未来安全
摘要
在之前的文章“为机器人技术的未来发展筑牢安全防线:网络安全的作用”中,我们全面介绍了机器人控制系统面临的安全挑战。文章强调了遵守机器人行业安全标准的重要性,并探索了加强机器人控制系统保护所需的基本安全能力。此外,我们还展示了如何利用ADI公司的安全产品来实现特定的机器人安全用例。本文首先概述构成工业机器人/协作机器人的组件。值得注意的是,许多类似的组件也常用于自主移动机器人(AMR)和拾放系统。随后,我们将探讨各种机器人安全用例,展示ADI的安全产品如何简化不同机器人控制系统中安全机制的实现。
构建安全的机器人控制系统:关键技术能力和开发方法
为了更好地理解实现安全机器人控制系统所需的关键技术能力和技术,我们在此重新回顾上一篇文章中的相关内容,其中包括:
u 安全认证:集成安全认证器来验证设备/组件身份。
u 安全协处理器:利用专用硬件实现安全存储和加密操作。
u 安全通信:实施加密协议以保护数据交换。
u 访问控制:实施细粒度权限管理机制,防止未经授权的系统访问。
u 物理安全措施:采取措施防止物理篡改。
除了上述方面之外,系统开发人员还必须采用结构化的安全开发方法,包括需求收集、威胁建模、安全设计、实现、测试、认证和维护等环节。遵循安全开发生命周期(SDL)可确保从一开始就注重安全性。
工业机器人和协作机器人组件概述
图1显示了与工业机器人/协作机器人操作相关的典型组件。表1简要概述了不同的组件。
表1.工业机器人/协作机器人组件概述
| 组件名称 | 说明 |
|---|---|
| 分段 | 核心物理组件,多个分段通过关节互连,并由电机驱动。机械臂用于实现精密运动。 |
| 关节 | 两个分段通过关节互连;关节具有电机和电机控制器,用于控制所连接的分段的运动。有时,工业机器人仅将电机保留在关节中,而电机控制器本身位于关节外部。 |
| 机器人控制器 | 机器人的核心智能组件,负责协调机器人的运动和各种动作。它支持控制器与各个关节和末端执行器的通信。控制器本身通过EtherCAT?、PROFINET?等工业通信协议连接到外界。 |
| 末端执行器 | 安装在机械臂上的工具,可以执行抓取、焊接、切割等动作。末端执行器可能具有直接与云端交互的传感器。在有些情况下,末端执行器直接连接到机器人控制器。 |
| 编程界面(示教器) | 操作员通过编程界面教导和配置机器人动作。 |
| 可编程逻辑控制器(PLC) | 可配合机器人控制器使用,增强机器人系统的自动化和控制能力。独立的机器人系统可能不接PLC。 |

图1.工业机器人/协作机器人的各个组件
机器人安全用例:利用ADI的专业能力和产品进行设计和实现
可信的PLC操作和网关保护
PLC和机器人控制器的结合能够为工厂自动化系统提供精准控制能力,实现对各种流程的精细控制。近年来,机器人技术不断进步,推动了拥有类似PLC功能的集成控制器的发展。确保PLC操作的可靠性和安全性,对于维护工厂自动化系统安全运行至关重要。参见图2。
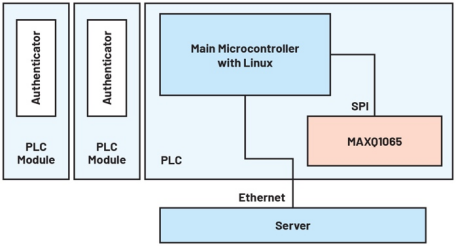
图2.利用PLC保障安全
在PLC中使用MAXQ1065(采用ChipDNA?技术的超低功耗加密控制器,适用于嵌入式设备)等器件可支持以下用例:
注:ChipDNA技术利用电子元件的特性来生成安全的加密密钥。此密钥并非存储在内存或任何固定位置中,因此针对网络攻击的防护能力大大增强。
u 安全识别PLC模块并防止克隆。
u 安全引导和固件下载。
u PLC模块与PLC服务器之间采用非对称密钥相互认证。
u 通过ECDH密钥交换建立安全通信会话。
u 使用AES对网络数据包进行加密和解密。
节点直连云端的安全性
通过节点到云端的通信(见图3),机器人可以实现多种功能,例如远程监控、数据分析、软件更新等。确保节点和云端之间的通信安全至关重要。
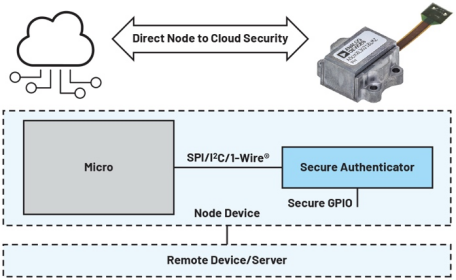
图3.集成MAXQ1065以实现节点直连云端的安全性
MAXQ1065能够为传感器到云端和传感器到网关的通信提供增强的安全功能:
u 支持实现传输层安全(TLS)协议,确保安全加密的数据传输。TLS用于验证真实性和保护敏感信息,对于节点和云端之间的安全通信至关重要。
u 保障专有传感器到网关或节点到网关连接的通信安全。控制器通过支持密钥交换和数据加密来帮助建立受保护的通信通道,从而增强基于RF或其他专有协议的安全性。
u 提供其他安全功能,如节点认证、可信节点操作、安全引导和安全固件更新。这些功能通过验证节点身份、确保可信操作和防止未经授权的修改来增强系统安全性。
传感器数据保护
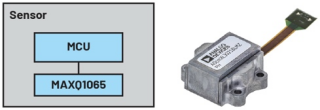
图4.传感器数据保护
u 静态数据可以利用ChipDNA技术进行加密。
u 传感器的关键校准数据或传感器配置信息可以存储在MAXQ1065的安全存储器中,防止数据被篡改或泄露。此外,这些数据能以加密方式存储在系统中。参见图4。
供应链安全
供应链安全的范畴十分广泛。参见图5。
u 防止产品克隆(假冒)。
u 安全地管控基于软件的功能启用,防止IP丢失和收入损失。
u 验证硬件真实性。参见图6。
使用ADI的安全认证器可以轻松实现供应链安全。
u ADI的预编程认证器能够提供强大的防伪保护。
u 在设备/产品的整个生命周期内,安全的生命周期管理和密钥管理可确保资产始终安全。
u ADI的认证器支持实现安全的功能启用,保护宝贵的知识产权。
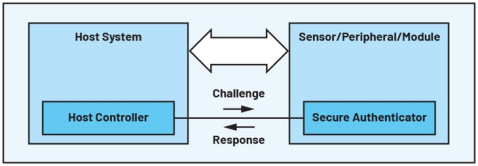
图5.使用质询和响应序列测试真实性
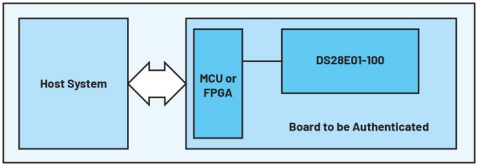
图6.采用DS28E01-100的硬件认证示例
PLC到节点的通信安全
安全认证器有助于保障通信安全,例如PLC与执行器或传感器之间的通信,或是PLC与SCADA(监视控制和数据采集)控制系统之间的通信(认证器在PLC中,而非SCADA系统中)。它能帮助实现TLS协议,TLS是基于互联网协议的通信中广泛使用的传输层安全协议。
机器人的关节身份验证
在机器人中实施关节身份验证(见图7)可确保只有合法且授权的实体才能在机器人系统内部进行交互,从而显著增强整体安全性。这样做能够有效防止未经授权的访问,强化通信安全,提升系统整体的完整性和可靠性。
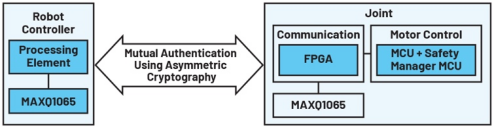
图7.关节身份验证
关****节安全引导
机器人的关节安全引导(见图8)为实现安全可信的操作环境提供了坚实的基础。它能防范未经授权的软件执行、恶意软件和篡改,增强系统的安全性和可靠性。关节安全引导通过建立信任链并验证软件组件的完整性,确保机器人系统整体运行的完整性和真实性。关节的安全更新也以类似方式实现。
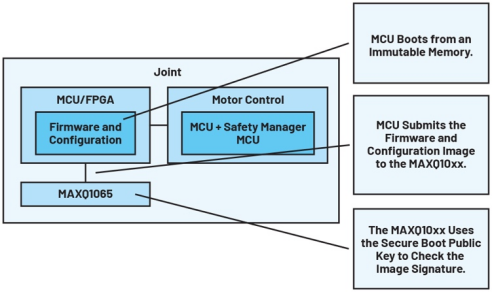
图8.关节安全引导
关节和机器人控制器的选择性功能启用
安全引导成功后,应用微控制器单元(MCU)/处理器/现场可编程门阵列(FPGA)可以读取认证器/协处理器的安全可配置存储器,以便选择性地启用关节/机器人控制器的功能。参见图9。
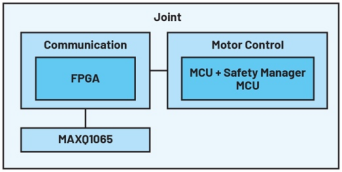
图9.典型的关节框图
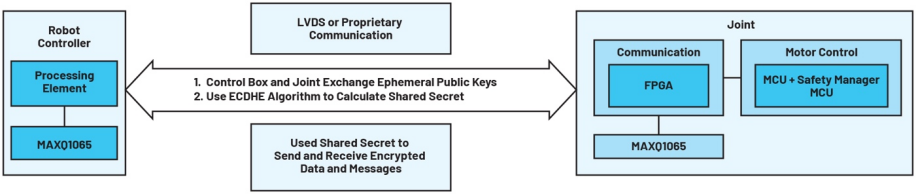
图10.关节安全通信
校准数据存储 - 关节和机器人控制器
外设在出厂时需进行单独校准,而妥善存储校准数据是确保测量精度长期稳定的关键。企业或机构可以将这些数据安全地存储在认证器中,从而确保完整性并防止未经授权的访问。主机系统可以检索和利用这些存储的数据,使外设的测量结果更加精准可靠。通过安全存储校准数据,系统得以提升整体精度和性能,产生有价值的洞察分析,并保持高质量标准。
关节安全通信
关节安全通信能够增强机器人系统的整体安全态势,确保数据交换可信且受到保护。参见图10。
结论
机器人技术的未来发展,离不开网络安全的保驾护航。安全认证、加密通信和供应链安全等强有力的措施,对于防范威胁至关重要。ADI的产品和解决方案具备先进的安全特性,能够保障机器人系统的完整性和可靠性。通过把网络安全置于优先位置,并充分发挥ADI的专业优势,我们不仅能够全面释放机器人技术的潜力,还能有效应对互联世界中的新兴风险。
参考文献
Jean-Paul A. Yaacoub、Hassan N. Noura、Ola Salman、Ali Chehab,“Robotics Cyber Security:Vulnerabilities, Attacks, Countermeasures, and Recommendations”,International Journal of Information Security,2021年3月。
Christophe Tremlet,“IEC 62443系列标准:如何防御基础设施网络攻击”,ADI公司,2023年4月。
“利用安全认证保护研发投资”,ADI公司。“DS28S60使用基础知识”,ADI公司。
关于ADI公司
Analog Devices, Inc. (NASDAQ: ADI)是全球领先的半导体公司,致力于在现实世界与数字世界之间架起桥梁,以实现智能边缘领域的突破性创新。ADI提供结合模拟、数字和软件技术的解决方案,推动数字化工厂、汽车和数字医疗等领域的持续发展,应对气候变化挑战,并建立人与世界万物的可靠互联。ADI公司2024财年收入超过90亿美元,全球员工约2.4万人。ADI助力创新者不断超越一切可能。
作者简介
Manoj Rajashekaraiah是ADI公司安全事业部的首席工程师,主要负责软件系统设计工作。他专注于嵌入式设备安全,尤其擅长为汽车和物联网应用开发安全、安保和传感器软件。Manoj是一位经验丰富的演讲者和博主,热衷于分享知识,曾在IEEE INIS和VDA Automotive SYS等会议上分享个人见解。他在embedded.com上发表过文章,并定期在卡纳塔克邦的研究所发表演讲。Manoj拥有印度彼拉尼BITS的嵌入式系统硕士学位。
-
ADI
+关注
关注
149文章
46051浏览量
263286 -
机器人
+关注
关注
213文章
29922浏览量
214337 -
安全机制
+关注
关注
0文章
22浏览量
10462 -
工业机器人
+关注
关注
91文章
3465浏览量
94504 -
机器人控制系统
+关注
关注
1文章
18浏览量
3802
发布评论请先 登录
ADI解读机器人控制系统中的安全风险和有效安全措施 为机器人技术的未来发展筑牢安全防线

使用德州仪器产品简化机器人电机驱动器安全评估

详细介绍机场智能指路机器人的工作原理
基于先进MCU的机器人运动控制系统设计:理论、实践与前沿技术
高安全低功耗MCU:机器人控制系统的智能化与可靠性提升
发那科机器人A型控制柜急停板安全回路接线方法
如何选择并整合多维安全系统来保护工人免受协作机器人伤害
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.全书概览与第一章学习
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
安全光栅在工业机器人上的应用






 工商网监
工商网监
评论