 哈佛打造史上最轻飞行机器人 仅259毫克
哈佛打造史上最轻飞行机器人 仅259毫克

近日,Nature封面发表一项重磅研究:哈佛大学开发出史上最轻的自主飞行机器人!这个蜜蜂机器人仅259毫克,只需太阳能供电就能实现持续、不受束缚的飞行!
早在达芬奇的时代,飞行的动物就激发了人类的探索精神,人们一直试图模仿自然界中的飞行动物,制造出能够扇动翅膀飞起来的机器。
在Nature杂志的封面文章中,由Robert J. Wood教授领导的哈佛大学微机器人实验室的研究人员展示了他们模拟昆虫制造的飞行机器人,这是一个四翼的蜜蜂机器人,他们称之为RoboBee X-Wing。
研究人员声称,这是迄今为止最轻的昆虫飞行器,它使用太阳能电池,只要有光源就能持续、不受束缚地飞行。
这个受昆虫启发的机器人是有史以来最轻的飞行器,可以在无需电源栓绳的情况下实现持续飞行。RoboBee X-Wing重259毫克,比回形针还轻,翼展约3.5厘米。
它由重量约为10毫克的微型太阳能电池供电,与点亮一串LED圣诞灯串上的一个灯泡相比,驱动一个RoboBee所需的能量更少。
与以往的微型飞行机器人相比,这个RoboBee具有更好的传动比,改进的执行器,以及一对额外的机翼。
这些改进使得这个微型机器人有足够的升力,能够携带6块太阳能电池和机载电子设备。
研究人员表示,这个不受束缚的机器人蜜蜂可以用于环境探索、搜索和救援任务,等等。
有4个翅膀的蜜蜂机器人:259毫克,太阳能供电
以前的蜜蜂机器人通常被设计得非常像蜜蜂,有两个跟蜜蜂翅膀差不多大的扑翼。毕竟,蜜蜂用两只翅膀就可以做很多事情,那么为什么机器人不能呢?
事实证明,有翅膀的微型机器人之所以不能完成蜜蜂能做的事情,原因有很多,比如偏航控制问题就已被证明很棘手。这也是为什么使用四个翅膀而不是两个翅膀这种不那么类似蜜蜂的设计很吸引人的原因之一。
此外,扑翼机器人与固定翼无人机和四旋翼直升机相比,还有一些潜在的优势。拍动翅膀使动物和机器高度灵活和机动——例如,蝙蝠可以轻松地飞过地下室、洞穴和茂密的森林。此外,扇动的翅膀通常比螺旋桨的叶尖速度要慢,因此更安静,如果它们撞到人,造成的伤害也更小。
实现昆虫大小的飞行机器人有3个具体的挑战。
首先,用于制造机器人的材料必须既坚固又轻盈。
其次,人类设计的致动器(将能量转化为运动的装置)和电池还远未实现生物组织的功率和能量密度。
第三,动物通常用来保持稳定飞行和操纵的传感和控制算法复杂得令人难以置信。即使使用超级计算机,也很难模拟动物飞行的算法,尽管一个典型的昆虫大脑只有大约100万个神经元——这比超级计算机处理系统中的组件数量少了一个数量级。
当然,Jafferis团队的工作并不是第一个能自主飞行的扑翼机器人昆虫。去年在ICRA,华盛顿大学的一个小组就展示了一个双翼机器人,当激光对准它的太阳能电池时,它就能起飞。不过哈佛大学的机器人蜜蜂不止是能“起飞”,而且能在空中持续飞行。
RoboBee X-Wing机器人的结构如下图所示。持续飞行要求要有持续供能、而且轻量的电源。以前的昆虫机器人,有线的电源显然不行。
RoboBee X-Wing。只有几厘米大小的飞行器,通过扇动翅膀飞行。提供动力的太阳能电池板安装在机翼系统上方,电子设备则安装在机翼下方。
作者巧妙地避开了有线电源的问题,而是在机器人蜂顶部安装太阳能电池板。在高强度光源照明下,太阳能板能提供大约120毫瓦电能,足以驱动这个只有259毫克的飞行系统。
太阳能电池板,包含6块约5mm边长的太阳能电池
RoboBee的核心是一个由复合材料制成的扑翼系统,采用激光加工技术。这是该研究团队的一个特点,他们属于哈佛微型机器人实验室的一个研究小组。该小组开发了一种设计和制造工具,并且已经开发得相当成熟,成为制造小型机器人的宝贵(和令人羡慕的)资源。
扑翼系统
目前他们设计的扑翼系统采用了创新的四翼结构,前后摆动。这种运动是由集成压电材料(将电转化为机械力的材料)驱动,并产生足够的升力和可接受的功率需求。
悬挂在机翼系统下方的电子设备
压电材料的一个缺陷是,尽管它们可以对材料施加相当大的力,但它们会引起微小的位移,并且需要高电压。当前工作的关键进步是优化了机械传动,从而能够产生适当的力,并开发了一个轻量级的电子电路,将太阳能电池板产生的低电压转换成压电材料所需要的200伏特的脉冲功率。
所有这些部件组合在一起,最终形成了这个又高又瘦的飞行机器蜜蜂,它的太阳能电池板高挂在机翼系统上方,电子设备悬挂在机翼下方。
它当然不是最美观的飞行器,但当灯一亮,它就会升空,并实现持续、自主、不受束缚的飞行。
下面,我们分别介绍蜜蜂机器人的电池、机翼和电子电路板三大核心组件。
为什么是四个翅膀?蜜蜂机器人三大核心组件解析
近年来,人们对开发“亚克级”(sub-gram)飞行器产生了浓厚的兴趣,人们普遍预计这类自主飞行器的机动性很高,可广泛用于环境监测、密闭空间内导航等应用。然而,随着毫米级飞行器(MAV)的尺寸越来越小,需要采用与此前不同的致动策略,以及基于挠曲的内部结构,以克服极小尺寸带来的诸多限制。尺寸问题降低了电磁电动机性能,并增加了传统轴承摩擦带来的损失。
在毫米级的飞行器中,通常选择压电作为致动来源,因为它们的功率密度标度为L^-1(其中L是致动器长度),且致动器的振荡操作可以与机翼的期望运动良好匹配。制造和组装技术的进步进一步增加了在微型机器人系统应用的稳健性。不过,这种飞行器飞行必须依赖外部电源和控制系统。
在本文中,我们在“昆虫级”飞行器内部集成了超低重量的电源和信号发生器,以实现持续的无附件飞行。我们将这款飞行器命名为RoboBee XWing。
RoboBee XWing飞行器及其性能
a,飞行器质量仅90毫克,有四个机翼,翼展3.5厘米。太阳能电池位于车辆上方3厘米处,以防止与机翼的空气动力学干扰。驱动电子装置定位使质心和压力中心对齐。整个集成系统重259毫克,高6.5厘米。
b,飞行器在无附件飞行期间按设定拍摄视频。光源在机架外部正上方提供大约三倍于太阳的光强度。连接到太阳能电池阵列的Kevlar线的作用是确保飞行安全。
飞行器的设计
a,RoboBee XWing。
b,氧化铝桥压电致动器(PZT为压电换能器)。
c,飞行器的特写俯视图中可以看到每个致动器与两个机翼的连接机构(左侧,用于图a中的飞行器)与每个致动器连接一个机翼的结构(右侧,用于以前的飞行器)对比。图中黄色部分是将两个机翼固定到变速器上的适配器。此外还显示出传动比T和机翼运动行程的旋转中心。
d,在峰值升力操作条件下(210 V,165 Hz),机翼运动随时间变化的空气动力学示意图。
考虑到飞行器的状态,驱动电子设备和电源的升力、重量,功率和效率,实现无附件飞行所需的光强度相当于5-7个太阳(1太阳≈1kW m?2),这个条件是无法实现的。我们采用新的设计方式解决了这个问题。首先是对致动器设计的改进,降低传动比(机翼行程角与致动器尖端偏转的比率)让升力峰值增加了38%(同时保持致动器尺寸不变)。
为了在不明显增加功耗的情况下实现升力的显著提升,可以通过降低机翼运动速率,增大机翼面积的方法来实现,功率=力×速度。而增大机翼面积的最有效方法是增加更多的机翼,四机翼飞行器能够将效率提高多达30%。
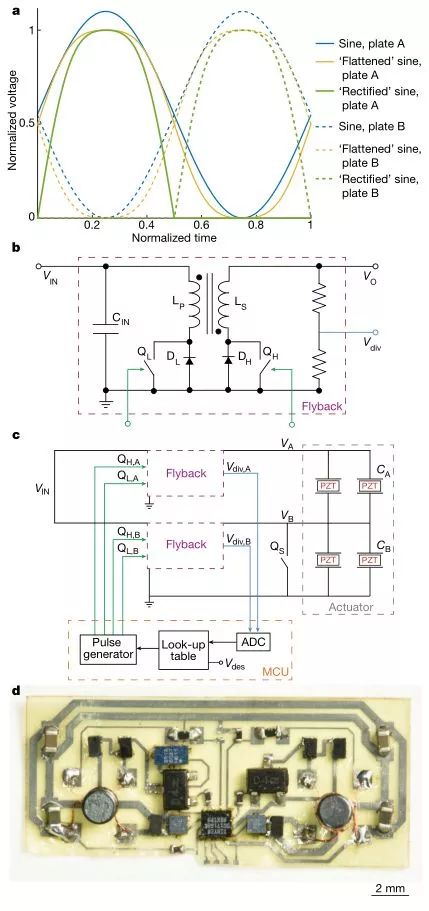
驱动电子电路
a,三个驱动波形会产生相同的机翼运动。
b,双向反激式转换器电路图。VIN是输入电压,CIN是输入电容,QL是低位开关,DL是低位二极管,LP为变压器初级绕组,LS是变压器次级绕组,QH是高位开关, DH是高位二极管,VO是输出电压。
c,完整电路图,包括来自b(紫色)的两个双向反激转换器,驱动两个压电晶片(标记为“致动器”)。微控制器单元(MCU)中的一个模数转换器(ADC)(橙色)分别监视板A(V A)或板B(V B)的输出电压。由一个查找表将结果与期望电压V des进行比较,并对相应的开关产生脉冲信号。
d,c图对应的真实部件。
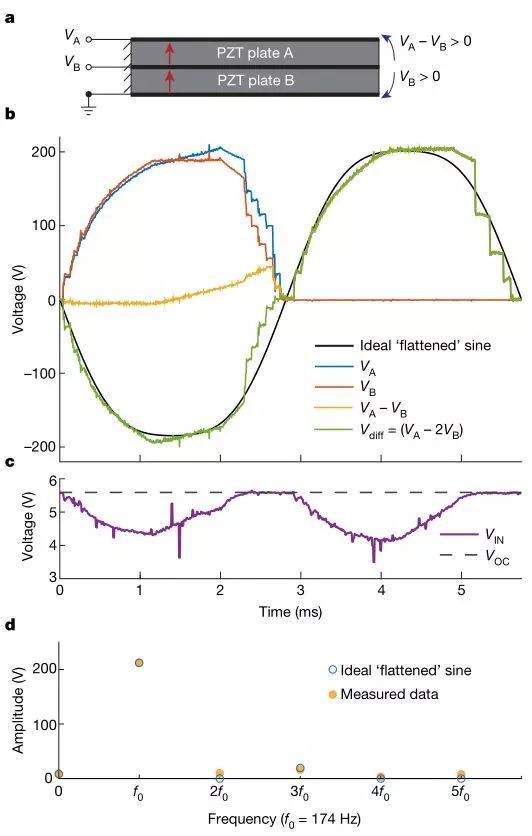
驱动电信号示意图
a,致动器横截面图,表示了电压命名,极化方向(红色箭头)和弯曲方向(蓝色箭头)。
b,对飞行器施加的实测电压。为了方便比较,我们绘制的是理想化的扁平正弦电压信号(Vpp = 193 V,f = 174 Hz,加入8.4 V的电压偏移以匹配数据。
c,相应的输入电压(V IN); V OC是光伏电池阵列的开路电压。
d,对实测数据(V diff)和理想化扁平正弦的前几个谐波的振幅比较。
5-7个太阳才能起飞!未来优化空间巨大
该设备本身是一个令人印象深刻的成就,同样值得的瞩目的是该团队为系统进行的详细描述的建模和设计。飞行机器蜜蜂不只是将各个部件结合在一起。它还反映了重量、电能、控制、力量、弹性甚至成本等各种因素达成的平衡。
还有很多工作要做,我们还没有完全达到机器人群将飞上天空的地步。Jafferis和他同事的机器人需要强烈的光来产生足够的能量才能起飞(至少是太阳强度的5-7倍),研究人员表示将来的工作是将电力需求降低到一个太阳的强度就能提供。
此外,这台机器人飞行了没一会就从视野中消失了,很可能是要迫降了。在 RoboBee X-Wing 真正实现自主飞行之前,还需要进行一些设计优化等工作。
-
太阳能
+关注
关注
37文章
3550浏览量
116617 -
机器人
+关注
关注
213文章
29933浏览量
214370 -
哈佛
+关注
关注
0文章
11浏览量
9001
原文标题:重磅研究!哈佛打造史上最轻飞行机器人
文章出处:【微信号:htyunwang,微信公众号:工业互联网观察】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
工业机器人的特点
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品






 工商网监
工商网监
评论