 解读安森美智能移动机器人解决方案
解读安森美智能移动机器人解决方案

与传统工业机器人不同,智能机器人运用多种传感器、人工智能及先进算法,能够与环境互动、检测障碍物,并与人类及其他机器协同工作。部署自主机器人有助于提升生产力与效率:它们可承担重复性或耗时任务,让人类工人得以专注于增值活动。轻负载场景下,系统可采用 12 V电池供电;较高电压(如 48 V)则能降低工作电流,从而减小导线尺寸并节约成本。目前,智能机器人主要应用于仓库、生产工厂等受控环境,但其户外作业的应用趋势正不断扩大。
框图
顶层拓扑
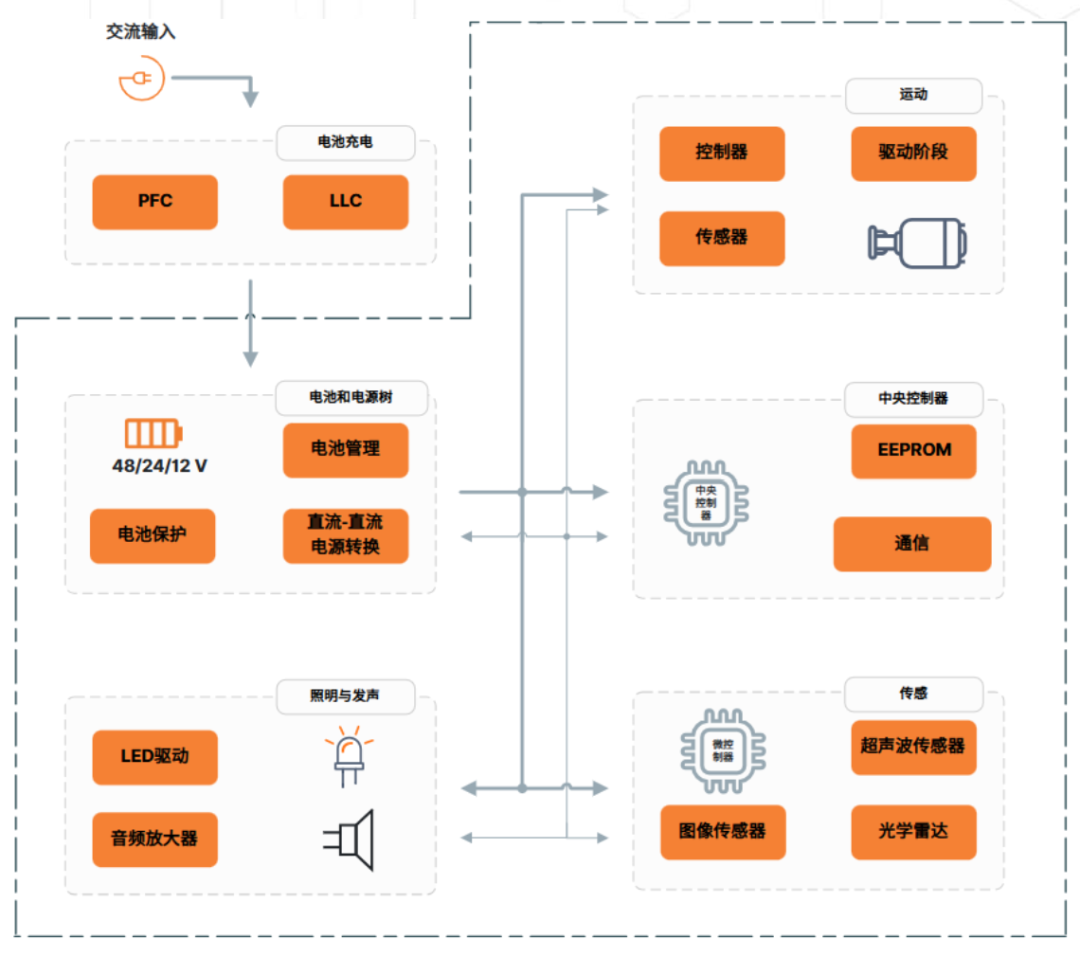
下面的框图展示了安森美 (onsemi)打造的智能移动机器人方案。 机器人系统由多个相互连接的子模块构成, 主要包括电池管理、 运动控制、 感测和中央处理器 (CPU) 等子模块。 这些子模块方案与具体的应用场景紧密相关:例如,仅在内部作业的机器人所需的传感器数量较少;而搭载机械臂的机器人则需要配备更多电机逆变器。
方案概述
连接(取代 CAN)
AMR 中的 CPU 和所有构建块需要相互通信。 通信手段有许多种。传统上, 使用的是 CAN、 LIN、 RS-485、 RS232和许多其他方式。 所有这些都可以用 10Base-T1S 取代。
它是 IEEE 在 802.3cg 第 147 条规范中指定的以太网协议。 借助 10BASE-T1S, 仅使用一根双绞线便可将多个PHY 连接到公共总线。 这减少了所需的交换机端口数量,并且无需网关。 由于 10BASE-T1S 只需要一根非屏蔽双绞线, 因此布线成本也大大降低。
此外, 10BASE-T1S 的通信速度可达 10Mbps, 高于迄今为止的许多方案(例如, LIN 最高为 20Kbps, CAN 最高为约 1Mbps) 。
任何节点都可以向/从任何其他节点发送/接收以太网帧, 类似于传统的以太网 LAN。
在多分支拓扑中运行时, 物理层冲突避免 (PLCA) 特性可以避免数据包冲突。 节点会根据各自的ID 轮流(一次一个) 在总线上进行传输。 PLCA 周期不是固定的, 取决于待处理的数据。
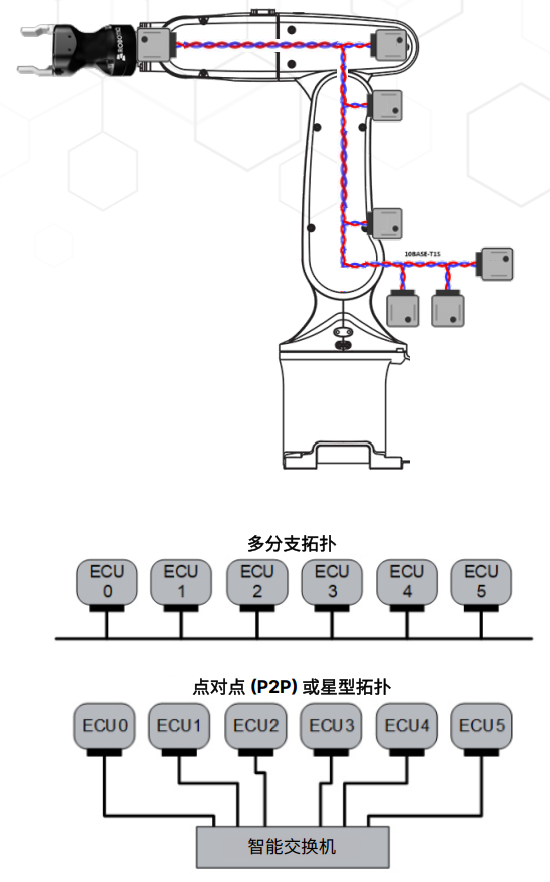
图 1:多分支与点对点网络拓扑
以太网控制器 NCN26010
10Mb/s 工业以太网 MAC+PHY IC 控制器
符合 10BASE-T1S – IEEE 802.3cg 标准
集成 MAC 和 10BASE-T1S PHY
PLCA 突发模式 – 如果某个节点需要发送比所有其他节点都多的数据, 则允许该节点在每次 PLCA 传输机会中发送更多帧
支持 8 个以上节点, UTP 线缆传输距离超过 25m
增强抗噪声能力
全局唯一 MAC 地址
32 引脚 QFN 封装

图 2: 10BASE-T1S MACPHY 评估套件
电感式位置检测
位置传感器会测量轮子或其他运动部件的旋转, 以准确跟踪它们在环境中的位置和方向。 这些传感器可用作 BLDC 控制电子换向的一部分。 电感式编码器相比传统的光学或磁检测有许多优势。
电感式检测稳健、 轻便、 只需很少的元件, 并且对振动或污染不敏感。
电感式检测 NCS32100
非接触式传感器方案, 由两片 PCB 组成:一个带有两个印刷电感器(无焊接元件) 的转子, 以及一个带有印刷电感器和编码器 IC 的定子。
传统光学编码器方案可能需要 100 多个元件才能正常工作, 与之相比, 安森美 NCS32100 仅需 12 个元件即可实现最小功能系统。
计算位置和速度
绝对编码器 - 无需移动即可确定位置
6,000 RPM 全精度(最大 45,000 RPM)
对于 38mm 传感器,精度为 +/- 50 角秒(0.0138度)或更高
可以区分并抑制旋转运动产生的振动
20 位单圈分辨率输出, 24 位多圈
集成 CortexM0+ MCU – 高度可配置
为广泛的光学编码器提供成本更低的替代方案
自校准 - 只需一个命令
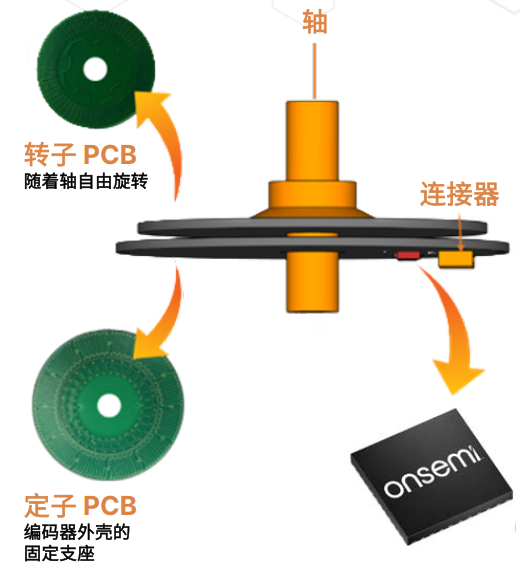
图 3: NCS32100 传感器方案
NCS32100 设计工具
安森美提供了大量设计工具,助力电感检测系统的设计,包括:自校准程序、固件及 PCB 参考设计文件/电气连接与固件的参考指南等。
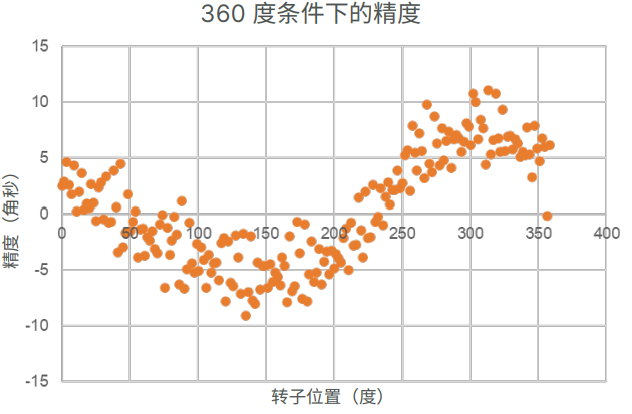
图 4: NCS32100 测量精度
-
机器人
+关注
关注
213文章
29933浏览量
214368 -
安森美
+关注
关注
32文章
1812浏览量
93472 -
移动机器人
+关注
关注
2文章
790浏览量
34248
原文标题:安森美一站式移动机器人方案,助力机器人智能化新突破
文章出处:【微信号:onsemi-china,微信公众号:安森美】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
安森美智能机器人解决方案






 工商网监
工商网监
评论