 使用S7-1500来控制S110伺服驱动器
使用S7-1500来控制S110伺服驱动器

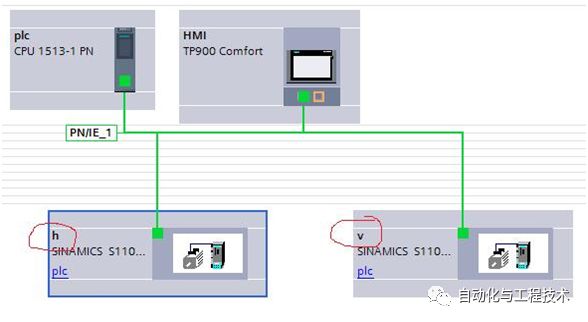
1. 系统配置
硬件配置如下:CPU 1513-1 PN 6ES7 513-1AL00-0AB0TP900 Comfort 6AV2 124-0JC01-0AX0SINAMICS S110 CU305 PN V4.4 6SL3 040-0JA01-0AA0SINAMICS S110 CU305 PN V4.4 6SL3 040-0JA01-0AA0
网络视图如下:
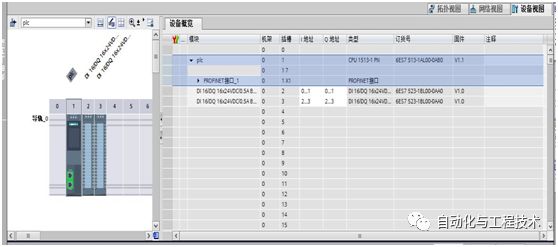
2.PLC系统组态、工艺轴组态
A、PLC组态
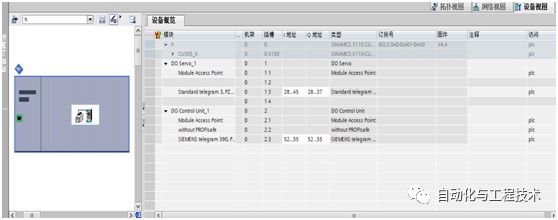
B、水平轴组态
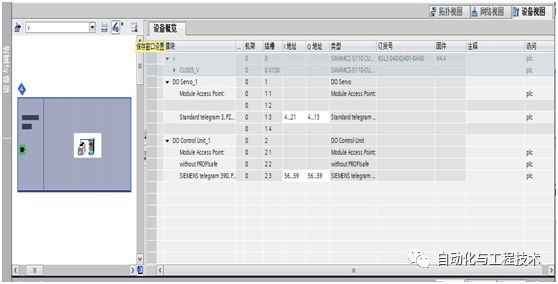
C、垂直轴组态
D、插入工艺对象Axis_H和Axis_V


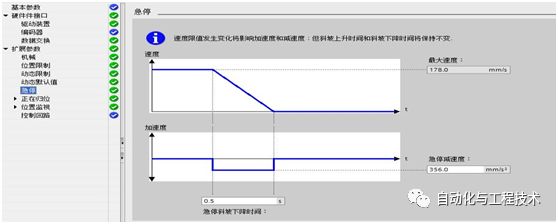
E、工艺对象Axis_H组态
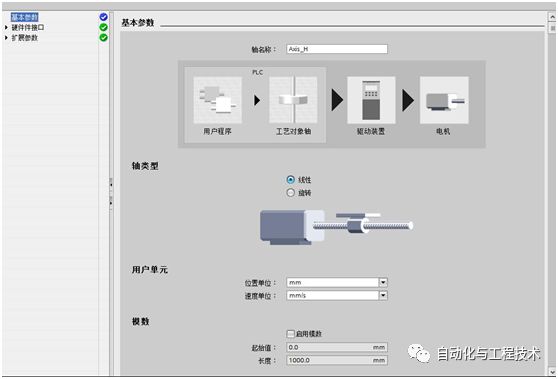
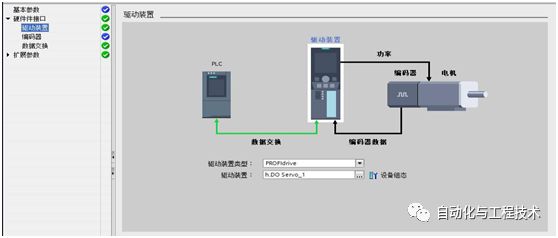
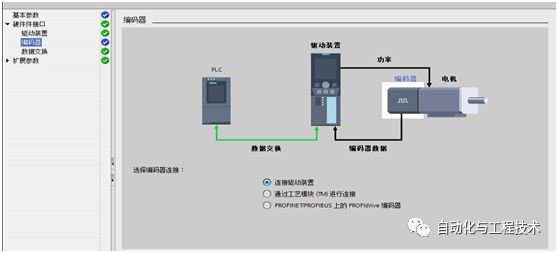
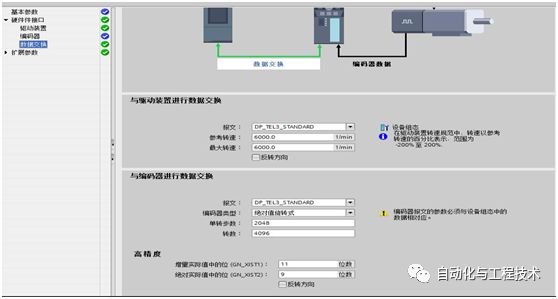
注意:报文需与Starter里面组态报文一致;参考转速、最大转速、单转步数、转数、GN_XIST1、GN_XIST2均可在Starter在线后参数里面查看。
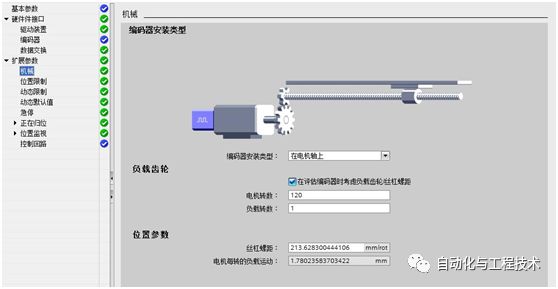
减速比,螺距均安实际情况计算所得。
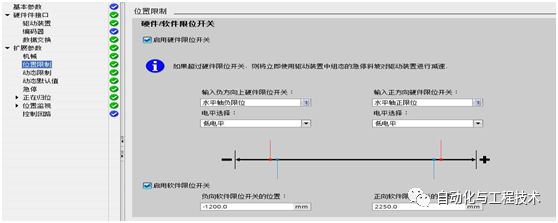
软、硬限位在调试初期可以不组态,等后期完善再添加即可。
F、工艺对象Axis_V组态同上
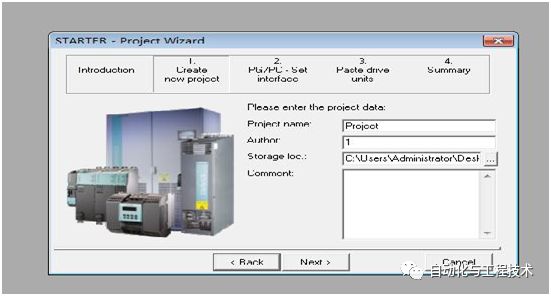
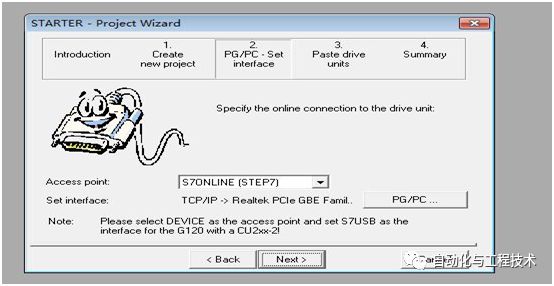
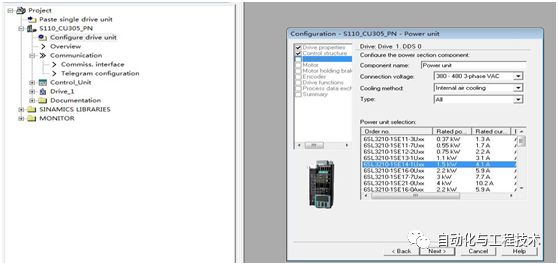
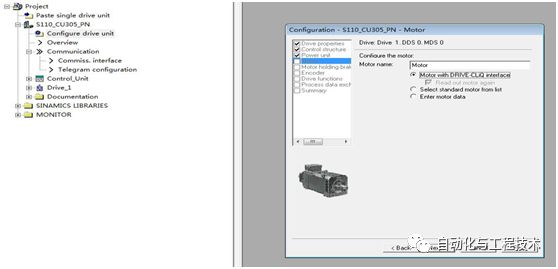
3.Starter组态A、新建一个项目
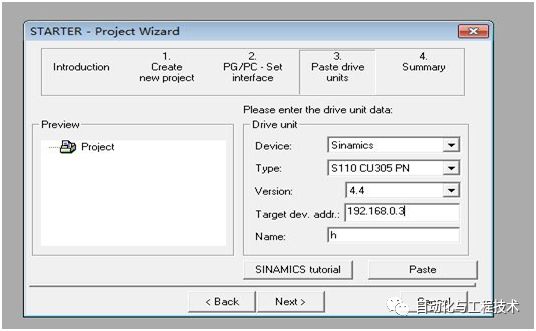
Config drive unit
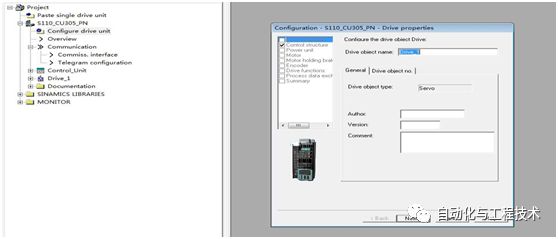
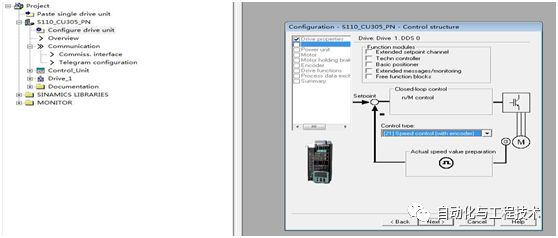
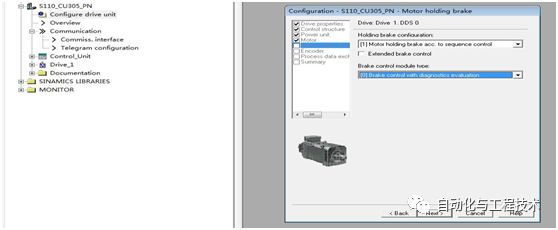
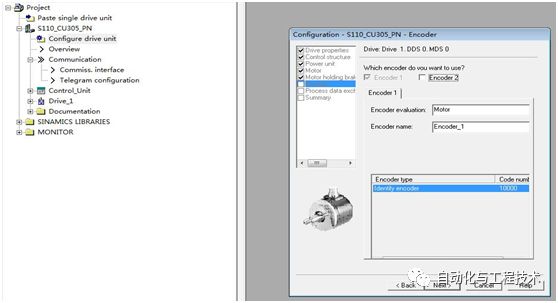
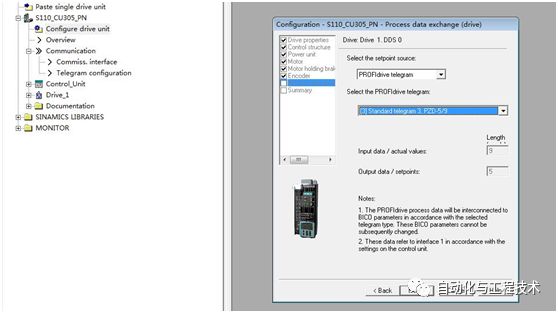
报文和工艺轴里面组态要一致。
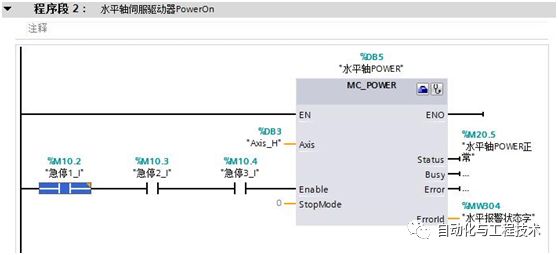
4.PLC手动调试程序编写
A、驱动器使能
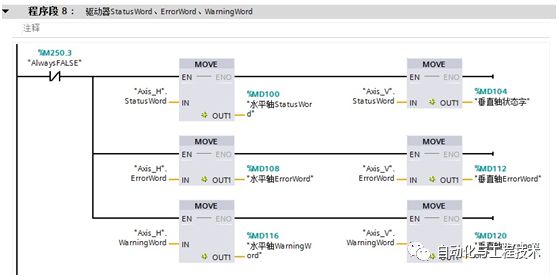
B、驱动器StatusWord、ErrorWord、WarningWord读取
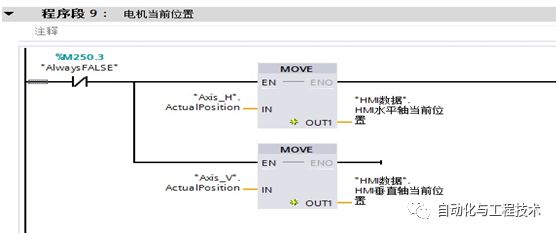
C、电机当前位置读取
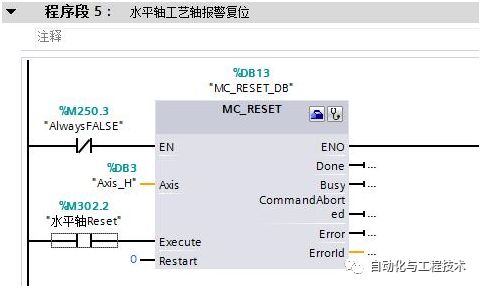
D、工艺报警复位程序编写
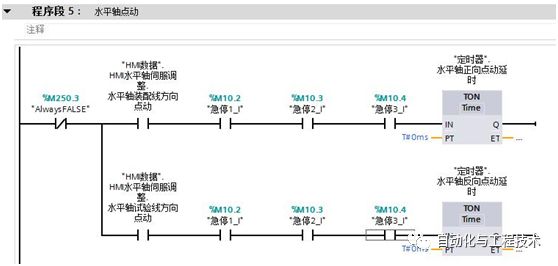
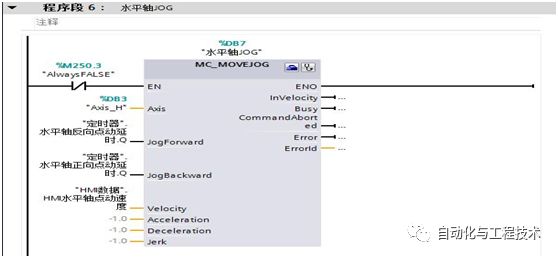
E、点动程序编写
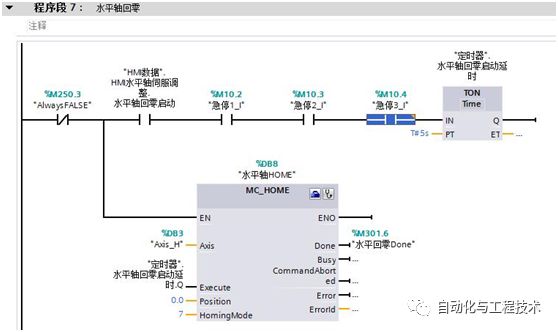
F、回零程序编写
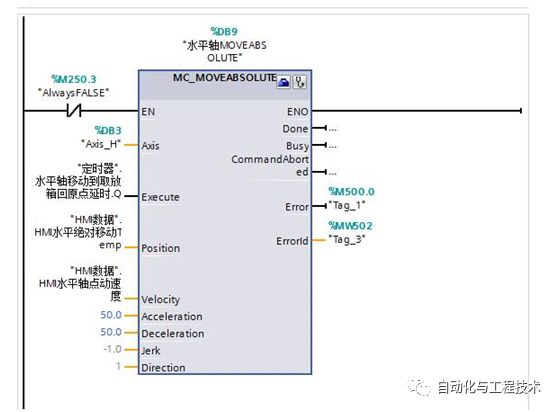
G、绝对位置运动程序编写
-
plc
+关注
关注
5037文章
14087浏览量
476561 -
伺服驱动器
+关注
关注
22文章
531浏览量
32730 -
S7-1500
+关注
关注
3文章
301浏览量
6927
原文标题:手把手教你用S7-1500控制S110伺服驱动器
文章出处:【微信号:robotqy,微信公众号:机械自动化前沿】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
S7-1500系列PLC+变频器+编码器组成位置控制系统设计原理
基于S7-1500的运动控制原理及实例

S7-1500连接V90实现的定位控制

基于S7-1500的运动控制功能介绍

SINAMICS S110单轴定位伺服驱动器选型手册
SINAMICS S110功能及接线图
关于S7-1200或S7-1500 PLC的通信
S7-1500 CPU支持与其它S7-1500 CPU进行直接数据交换
WinCC与 S7-1200/S7-1500 PLC之间的通信解析
西门子S7-1500 之间 S7 通信

S7-1500之间S7通信实例






 工商网监
工商网监
评论