 四足机器人ANYMAL挑战波士顿机器狗
四足机器人ANYMAL挑战波士顿机器狗

有一个机器人正在挑战波士顿动力公司出的那个著名的机器狗,它就是来自瑞士苏黎世联邦理工学院机器人系统实验室和 ANYmal 机器人公司合作研制开发的四足机器人——ANYMAL。
虽然这货与 SpotMini 很相似,但它可不是刻意地东施效颦哦~
因为,四足这种形式是建立稳定机器人的绝佳模型,即使发生故障它们仍可站立起来~
ANYmal 采用兼容而精确的可控扭矩致动器控制,使其能实现动态平衡和具备向上攀爬的能力。
借助于配备的激光传感器和摄像机,机器人可感知其环境,不断创建地图并精确定位。
基于这些信息,ANYmal 最终能自主规划导航路径,在行走时可以精心选择的立足点。
最近,ANYMAL 在2019 CES 展会上可谓大出风头,它化身快递小哥进行投送,这个未来物流的画面,着实是赚足了眼球!
这篇论文详细阐述了深度研究和训练 ANYmal 的过程与结果,例如其独特的控制策略。
在训练过程中,ANYmal 被人工智能所加持,其移动速度提升到原记录的25%,并能以非常类似真实动物的方式走动。
现在的 Anymal 机器人重约30kg,可载重10kg。
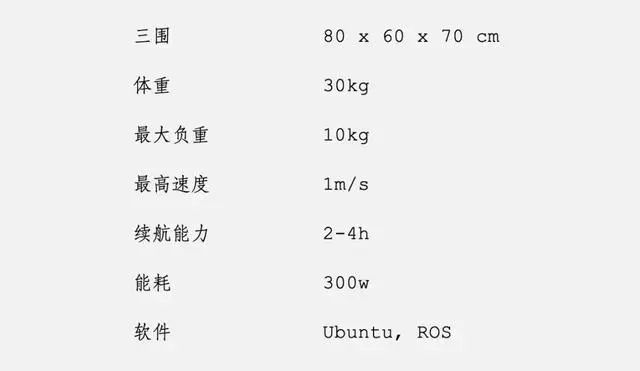
四足移动速度与几乎一名成人步行速度相同。
Anymal 甚至 get 到了使用电梯的技能。
而当实验室研究人员给 ANYmal 配上了六自由度机械手臂后,它可以和 SpotMini 机器人一样轻松完成开门动作~
捡矿泉水瓶也是轻而易举的事情~
而在经过了反复训练之后,ANYmal 自身平衡能力更稳定,任你怎么踹,这货都能都泰然处之~
最牛的是,这货在被暴力踹倒之后,还能立刻翻转并站立起来,动作像极了真实小狗的动作。
ANYmal 摔倒后爬起来的过程却是超级灵活,几乎和真正的狗狗没啥差别。。
另外研究人员还开发了一种仿真模式——在电脑里仿真出 ANYmal 的虚拟版本。这样不仅能同时训练多只ANYmal,而且这种虚拟的学习速度是现实的1000倍!
他们先让虚拟狗自己训练11个小时,再将结果下载到屋里机器人身上,效果极其好~
另外,ANYmal 还能通过增加高端的 RGB 变焦相机远距离收集图像信息,对压力表、液压计等进行检查。
当然了,ANYmal 还可以做很多其他的事情:军用、工业作业、救火救灾现场,尤其能在具有挑战性的地形中和恶劣环境下进行自主移动和操作,并与环境安全交互。(文章来源于抖创意)
-
机器人
+关注
关注
213文章
29939浏览量
214397 -
人工智能
+关注
关注
1810文章
49221浏览量
251507
原文标题:瑞士ANYmal:真正挑战波士顿动力的机器狗出现了!
文章出处:【微信号:robotinside2014,微信公众号:移动机器人产业联盟】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
工业机器人的特点
机器人看点:越疆机器人正式发布六足仿生机器狗 智元公布机器人运动控制模型专利
年出货约2万台!中国厂商主导全球四足机器人市场
NVIDIA 通过云端至机器人计算平台驱动人形机器人技术,赋能物理 AI

盘点#机器人开发平台
开源项目!基于Arduino控制的六足机器人
波士顿机器人滑环的技术特点与应用前景
波士顿动力与RAI Institute联手推进人形机器人技术

四足巡检机器人特点和作用是什么

【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
开源项目!OpenCat—— 一个全能的平价四足机器人
【CW32开发】初探四足机器人

在NVIDIA Isaac Lab中训练四足机器人运动






 工商网监
工商网监
评论