 多轴精密稳像云台的机电一体化驱动设计
多轴精密稳像云台的机电一体化驱动设计

多轴精密稳像云台无刷马达驱动方案的机电一体化驱动设计是当前光电稳定平台领域的重要研究方向,其核心目标是通过机电系统的协同优化,实现高精度、高动态响应的姿态稳定控制。本文将从机械结构设计、驱动系统选型、控制算法实现以及性能测试等方面,系统阐述多轴精密稳像云台的关键技术。
云台无刷马达驱动方案
一、机械结构设计与优化
多轴稳像云台的机械结构需满足轻量化、高刚度和低惯量的要求。主流设计采用三轴框架结构(俯仰、横滚、方位),通过碳纤维复合材料实现框架减重。在轴系设计中,交叉滚子轴承的选用显著降低了摩擦扭矩,其径向和轴向跳动可控制在5角秒以内。为抑制机械谐振,需通过有限元分析优化框架模态频率,使其避开伺服带宽(通常>100Hz)。某型云台的实测数据显示,采用拓扑优化后的镁合金框架,一阶固有频率提升至320Hz,较传统结构提高40%。
二、驱动系统关键技术
1. 力矩电机直驱技术:无刷力矩电机因取消减速机构,消除了齿隙误差,成为高端云台的首选。例如瑞士ETEL公司的TMB+系列电机,在300mm直径下可输出220Nm连续转矩,转矩波动<0.2%。配合高分辨率编码器(23位绝对值型),可实现0.0005°的定位精度。
2. 谐波减速驱动方案:在空间受限场景,谐波减速器与伺服电机组合仍具优势。日本HD公司的CSF系列减速器,在传动精度(<30角秒)和回差(<1角秒)方面表现突出。但需注意谐波减速器的刚度非线性特性,需在控制算法中补偿。
3. 驱动电路设计:三相全桥PWM驱动采用空间矢量调制(SVPWM)技术,开关频率通常设定在20kHz以上。电流环采样精度需达16bit,如TI的ADS8588S芯片可实现±0.05%的电流测量误差。某实验平台测试表明,采用死区补偿算法后,电机转矩脉动降低63%。
三、控制算法实现
1. 复合控制架构:典型系统包含位置环(带宽5-10Hz)、速度环(50-100Hz)、电流环(1-2kHz)三级闭环。基于模型预测控制(MPC)的新方法,在某型舰载云台中使稳定精度提升至3μrad(1σ值)。
2. 扰动观测技术:扩张状态观测器(ESO)可实时估计载体扰动,实验数据显示对1Hz以下的船摇扰动抑制比达40dB。结合前馈补偿,可使残差角速度<0.01°/s。
3. 智能补偿算法:深度学习构建的摩擦模型,在0.01°/s低速段使跟踪误差降低82%。某机载云台采用LSTM网络预测风扰,将稳定精度从15μrad提升至7μrad。
四、性能测试与验证
依据GJB2340-95标准,某型陆用稳像云台测试结果:
- 静态稳定精度:2.5μrad(RMS)
- 动态响应带宽:俯仰轴75Hz(-3dB)
- 扰动抑制比:>35dB@5Hz
- 功耗特性:额定工况下<300W,峰值效率达92%
五、技术发展趋势
1. 机电深度集成:将电机绕组与框架结构共形设计,如某研究团队开发的磁通反向电机,使云台轴向尺寸减少30%。
2. 新材料应用:超磁致伸缩材料(Terfenol-D)驱动器在微角秒级精密调整中展现潜力,实验室原型已实现0.001角秒分辨率。
3. 量子传感融合:基于冷原子干涉仪的惯性测量单元,有望将绝对基准精度提升至纳弧度量级。
当前挑战主要集中于极端环境适应性(如-40℃~+70℃温域)与多物理场耦合(电磁-热-力)优化。未来随着5G毫米波通信和边缘计算的发展,云台系统将向网络化、智能化方向演进,在无人系统、太空观测等领域发挥更重要作用。
?
审核编辑 黄宇
-
机电一体化
+关注
关注
1文章
99浏览量
23831
发布评论请先 登录
旷视科技与云舟智维合作打造装备维修智能一体化平台

电机群网络管控一体化PLC-SCADA设计及应用
云控智行发布车路云一体化智慧高速解决方案
一文看懂5G通感一体化

如祺出行入选智能网联车路云一体化典型案例
华为入选中国云网安一体化能力领导者
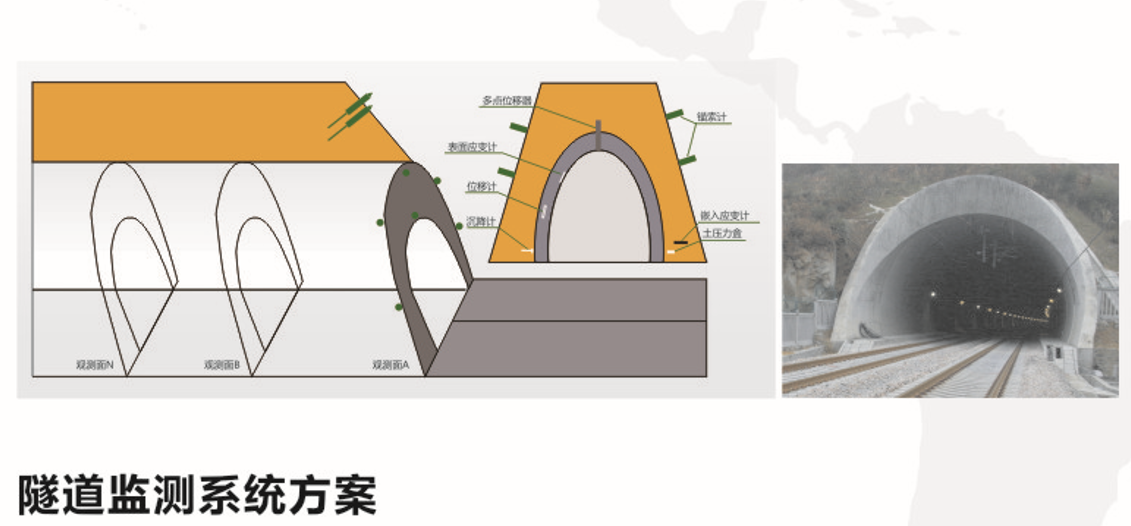
一体化监测,让隧道管理更科学 隧道监测与预警系统





 工商网监
工商网监
评论