 基于 AS32X601 微控制器的定时器模块(TIM)技术研究与应用实践
基于 AS32X601 微控制器的定时器模块(TIM)技术研究与应用实践

摘要: 本文全面介绍了国科安芯推出的AS32X601系列微控制器的定时器模块(TIM),包括其系统架构、功能特性、应用场景以及工程实践要点。通过对芯片的详细分析,揭示了其高性能运行的基础。本文详细阐述了高级定时器和通用定时器的计数器精度、预分频器可编程性,以及输入捕获、输出比较、PWM生成等关键功能,并结合数据手册补充了大量技术细节,如死区时间设置、刹车机制等。在应用场景部分,本文针对电机控制、数字电源设计、工业自动化等典型场景,探讨了TIM模块的实际应用方式,并结合DMA技术减轻CPU负担的具体实现方法。本文还强化了工程实践指南,提供配置流程优化建议、实时性保障措施以及可靠性设计要点,旨在为开发者提供详实的TIM模块应用参考资料。
关键词
AS32X601、定时器模块(TIM)、高级定时器、通用定时器、电机控制、数字电源、工业自动化
引言
AS32X601是国科安芯推出的一系列高性能的32位RISC-V指令集微控制器,广泛应用于工业控制、汽车电子、商业航天等领域。其内置的定时器模块(TIM)具备高级定时器和通用定时器,支持多种计数模式、PWM生成、输入捕获和输出比较等功能,是实现精确时间控制和信号处理的核心组件。
本文旨在深入剖析AS32X601微控制器的TIM模块,探讨其在不同应用场景中的应用实践,并提供详尽的工程实践指导,以帮助开发者更好地利用该模块实现高效、可靠的定时器功能。
AS32X601内置多个高级定时器(TIM)和通用定时器(TIMx),用于各种定时、PWM 生成、输入捕获、输出比较和编码器接口等应用。
高级定时器包含一个32位自动重载计数器,该计数器由可编程预分频器驱动,支持递增、递减、中心计数、编码器模式等计数方式。高级定时器具有6个独立通道,可实现测量输入信号的脉冲宽度、可编程PWM输出、带死区插入的互补PWM等功能。
通用定时器包含一个16位自动重载计数器,该计数器由可编程预分频器驱动,支持递增、递减、中心计数、编码器模式等计数方式。通用定时器具有4个独立通道,可实现测量输入信号的脉冲宽度、可编程PWM输出等功能。
第一章 定时器系统架构
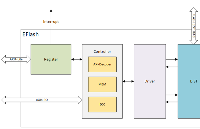
STM32微控制器的定时器系统采用模块化设计理念,构建了一个完整的时间管理生态系统。通用定时器(TIM2-TIM5)作为基础功能单元,采用多层次结构设计,包含时基单元、输入捕获模块、输出比较模块和中断控制单元。高级定时器(TIM1/TIM8)在此基础上增加了互补输出控制单元、刹车功能模块和霍尔传感器接口,形成更复杂的控制拓扑。
时钟网络采用分布式架构,通过APB总线桥接器与系统时钟相连。每个定时器都配备独立的预分频器(PSC)和自动重载寄存器(ARR),形成两级分频体系。这种设计既保证了时钟同步性,又提供了灵活的时钟配置选择。定时器内部采用流水线技术处理计数和比较操作,确保时序控制的精确性。
第二章 通用定时器功能详解
2.1 时基单元工作机制
时基单元是定时器的核心引擎,其工作过程可以分为三个阶段:时钟选择阶段通过多路复用器确定时钟源;分频阶段通过可编程预分频器调整计数频率;计数阶段由16/32位计数器执行实际计时操作。计数器采用同步设计,在时钟上升沿更新状态,确保计数的确定性。
2.2 输入捕获系统
输入捕获系统由边沿检测器、数字滤波器和捕获寄存器组构成三级处理流水线。边沿检测器支持可编程极性选择,数字滤波器采用可配置的采样窗口机制,有效抑制信号抖动。捕获事件发生时,系统会在当前计数周期结束后将计数器值锁存到捕获寄存器,同时设置中断标志。这种设计既保证了捕获精度,又避免了竞争条件。
2.3 PWM生成原理
PWM生成模块采用比较匹配机制,包含周期寄存器和占空比寄存器双重控制。在边沿对齐模式下,计数器从零开始递增,当与占空比寄存器匹配时改变输出状态,达到周期值时复位并重新开始。中央对齐模式下,计数器先递增后递减,在正负峰值点进行比较匹配,产生对称的PWM波形。输出极性控制电路可以独立配置每个通道的有效电平。
第三章 高级定时器增强功能
3.1 互补PWM输出系统
互补PWM系统包含主输出通道和互补输出通道,通过死区发生器实现安全切换。死区时间可编程配置,最小分辨率达到系统时钟的一个周期。刹车电路采用多级处理架构,包含模拟比较器、数字滤波器和状态机,确保在故障条件下快速关断输出。保护机制支持多种恢复策略,包括自动恢复和手动恢复模式。
3.2 编码器接口设计
编码器接口采用正交解码技术,内置方向识别逻辑和四倍频计数功能。接口包含噪声抑制电路,可有效处理机械触点抖动。位置计数器支持多种归零模式,包括硬件归零和软件归零。系统还提供索引信号处理功能,实现绝对位置校准。
3.3 高级触发系统
触发网络采用矩阵式拓扑,支持多种触发源选择。包括外部引脚触发、内部定时器级联触发和特定事件触发。触发信号经过同步处理后分发到各个功能单元,确保时序一致性。系统还提供触发延迟补偿机制,精确控制各通道的响应时序。
第四章 应用场景深度分析
4.1 电机控制解决方案
在无刷直流电机控制中,高级定时器实现六步换相控制算法。通过霍尔传感器接口检测转子位置,互补PWM输出驱动三相桥式电路。死区时间根据功率器件特性精确设置,刹车输入连接过流保护电路。重复计数器用于实现PWM周期倍数控制,减少CPU干预。
4.2 数字电源设计
开关电源应用中,定时器实现电压模式或电流模式控制。多通道PWM输出驱动功率级,输入捕获测量输出电压反馈。通过中央对齐PWM降低开关损耗,利用触发同步ADC采样实现闭环控制。保护功能实时监控故障条件,确保系统安全。
4.3 工业自动化应用
在自动化设备中,通用定时器处理编码器信号,实现精确位置控制。多个定时器级联构成测量系统,同时捕获多轴运动参数。通过DMA传输测量数据,减轻CPU负担。利用定时器同步功能,确保多轴运动的协调性。
第五章 工程实践指南
5.1 配置流程优化
推荐采用分步配置策略:首先初始化时基参数,然后配置功能模块,最后设置中断和DMA。时钟配置需要考虑APB预分频系数的影响,确保获得预期的计时精度。
5.2 实时性保障措施
关键时序控制应采用硬件自动完成,减少软件干预。中断服务程序遵循精简原则,复杂处理移交后台任务。使用影子寄存器实现参数的无缝更新,避免控制过程中的数据不一致。考虑使用定时器级联或主从模式实现长周期定时。
5.3 可靠性设计要点
电源设计需保证定时器供电稳定,避免复位异常。关键信号走线注意电磁兼容设计,必要时添加滤波电路。软件实现双重保护机制,结合硬件保护和软件监控。定期校准时钟基准,补偿温度漂移影响。
本技术手册通过系统化的架构分析、详细的工作原理说明和实用的工程指导,为开发者提供了全面的定时器应用参考。建议结合AS32X601参考手册,针对应用需求进行深度优化设计。
审核编辑 黄宇
-
微控制器
+关注
关注
48文章
7987浏览量
156969 -
mcu
+关注
关注
146文章
18092浏览量
371307 -
定时器
+关注
关注
23文章
3306浏览量
119806
发布评论请先 登录
AS32X601芯片Flash擦写调试技术解析
第二十二章 TIM——高级定时器
第二十一章 TIM——通用定时器
AS32X601驱动系列教程 GPIO_点亮LED详解
AS32X601驱动系列教程 SMU_系统时钟详解






 工商网监
工商网监
评论