 模拟人类触觉神经!触控传感器让人形机器人更像人
模拟人类触觉神经!触控传感器让人形机器人更像人

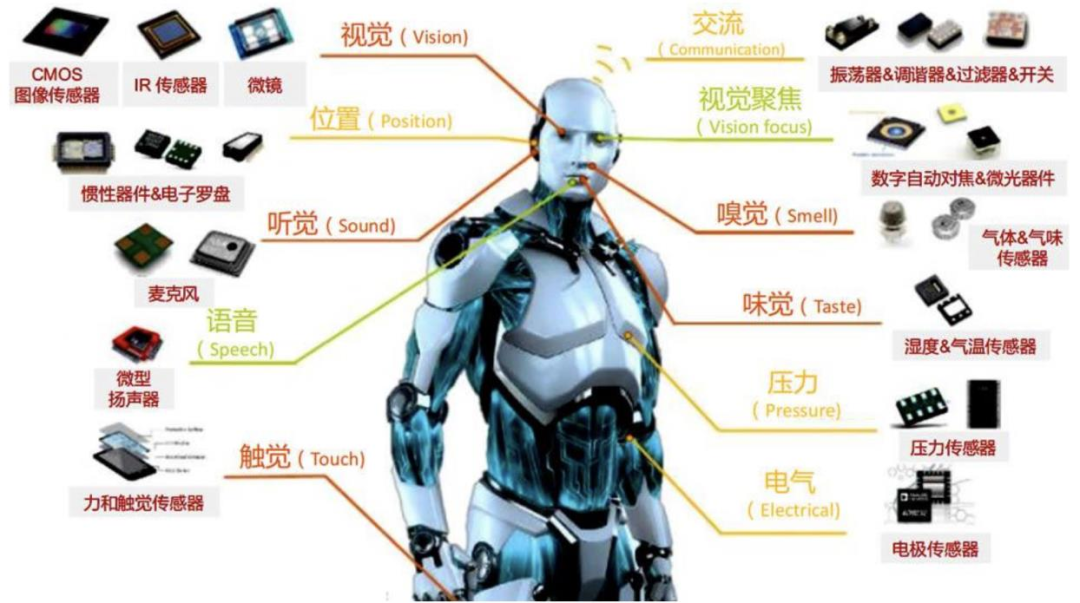
电子发烧友网报道(文/李弯弯)触控传感器是一种能够检测和响应人体或物体接触的电子装置,广泛应用于智能手机、平板电脑、工业设备、汽车控制面板等领域。其核心功能是将物理接触转化为电信号,进而实现人机交互。
触控传感器通过感知物理接触或接近动作,转换为电信号。常见原理包括电容式、电阻式、红外式、表面声波(SAW)。电容式:利用人体电场干扰传感器电极的电容变化。电阻式:通过按压使两层导电薄膜接触,测量电压变化。红外式:发射红外光网格,通过遮挡检测接触位置。表面声波(SAW):利用超声波在玻璃表面的传播,接触时反射波变化触发信号。
人形机器人用触控传感器技术创新方向
触控传感器在人形机器人中的应用是其实现智能交互、环境感知和安全控制的关键技术之一。通过集成多种触控传感器,机器人可以感知外界接触、识别用户意图,并做出动态响应。
触控传感器在人形机器人中的应用场景有手部触控、面部触控、身体表面触控、防生皮肤等。手部触控:在机器人手掌或手指部位集成柔性电容式传感器或压阻式压力传感器,实现抓取物体时的力度反馈(如避免捏碎易碎品)或手势交互(如弯曲手指触发特定指令)。
面部触控:在机器人面部(如眼睛或脸颊)安装红外或电容式传感器,感知用户触摸以触发交互(如轻拍头部唤醒机器人)。
身体表面触控:在机器人躯干、手臂等部位部署红外网格传感器或电容式阵列,实时检测外部碰撞或意外接触,触发紧急停止或避让动作。
仿生皮肤:覆盖全身的柔性电子皮肤(集成电容、压电或MEMS传感器),模拟人类触觉神经,感知温度、压力甚至纹理差异。
在人形机器人领域,触控传感器的技术创新是推动其智能化、柔性化和安全化的核心驱动力。行业从多个方向进行技术创新:其一,企业通过优化传感器材料和制造工艺,实现高精度与高灵敏度的触觉感知。例如,武汉华威科研发的灵巧手感知系统,指尖感应点面积仅1平方毫米,单手可集成1000个以上感应点,能够精准感知克级到公斤级的力度变化。
其二,多模态融合感知,结合压力、温度、材质等多维物理信息,提升传感器对环境的综合感知能力。帕西尼感知科技的多维触觉传感器可进行压感、摩擦等15种多维触觉感知,实现全量程0.01N高精度测量。
其三,柔性电子皮肤与仿生设计,通过仿生设计模拟人类皮肤的触觉反馈机制,使人形机器人在精密装配、医疗护理等场景中具备媲美人类的触觉能力。传感器采用超薄柔性材料,可反复弯曲100万次仍保持良好性能,适应人形机器人复杂动作的需求。
其四,分布式触觉感知,在机器人手指、手掌等部位部署高密度感应点阵列,实现全覆盖的触觉感知。例如,帕西尼触觉灵巧手DexH5搭载180个多维多阵列触觉传感器,能够完成捏、抓、按、提、推等基础动作,力控精度达0.01N。传感器实时采集力反馈数据,并通过算法动态调整抓取力度,避免对物体造成损伤。
主要的触控传感器企业及产品优势
人形机器人用触控传感器主要企业有千觉机器人、帕西尼感知科技、墨现科技、赛感科技、戴盟机器人。千觉机器人主要产品有高分辨率多模态触觉传感器、触觉感知与控制智能化模组,以及触觉仿真工具Xense_Sim。
千觉机器人自主研发的触觉传感器可提供包括高分辨率三维力觉、动觉、滑觉等在内的多模态触觉感知信息,突破传统触觉传感器仅能感受压力分布以及空间分辨率不足的问题。自研多模态高精度触觉传感器G1-WS专为机器人夹爪设计,信息感受密度高达人类手指的800倍,能够感知到细微的物体特征和变形。触觉仿真工具Xense_Sim能精准模拟切向运动与力信息,解决了此前切向力模拟技术空白的问题,仿真数据更贴合拧瓶盖、插拔接口等真实操作场景,有助于提升训练模型的泛化能力。
帕西尼感知科技主要产品有ITPU多维触觉传感系统,包括ITPU多维触觉芯片、四指灵巧手、微型视觉模组与数据驱动模型组成的软硬件一体化方案。
能够感知力觉、滑觉、温度、材质等多个维度的信息,自主研发的ITPU多维触觉传感系统具有高精度和丰富的信息感知能力。采用“四指”灵巧手设计,在保证功能的同时降低成本,砍掉一根指头成本直接降低20%。灵巧手在掌心内嵌摄像头,通过“触觉+视觉”融合,能有效避免因角度遮挡带来的识别失误,同时提升复杂操作的稳定性。
墨现科技是一家专注于柔性压力传感器研发与生产的科技企业,其核心产品和技术包括FLX系列柔性薄膜压力传感器、电子皮肤、触觉传感器解决方案。
FLX系列柔性薄膜压力传感器具有高可靠性、低触发力度、大量程和低成本的特点。该系列传感器可广泛应用于智能家居、医疗健康、物联网、消费电子、汽车电子、工业控制等领域。电子皮肤,由特殊的硅胶材质制作而成,具有优良的柔韧性和贴合度,能够完美融入机器人的机械结构中,为机器人提供全方位的触觉反馈。触觉传感器解决方案,为机器人提供高适应性的柔性压力传感器解决方案,已成功应用于普渡机器人等知名企业的产品中。
赛感科技主要研发和生产高性能柔性智能传感器、电子皮肤等产品。这些产品具有高灵敏、大量程、快响应、高线性等特点,能够广泛应用于人形机器人、健康医疗、可穿戴设备等领域。
公司掌握了柔性传感的核心技术,包括材料、结构、器件、系统等方面的全链条关键技术创新。其研发的离电式界面电容传感器,通过接触面积产生界面电容,能够精准响应静态力和动态力,突破了传统传感器高灵敏度和宽量程难以兼得的技术瓶颈。
戴盟机器人(Daimon Robotics)专注于触觉感知与具身智能技术,主要产品有视触觉传感器(DM-Tac W、DM-Tac F)、视触觉灵巧手(DM-Hand1、DM-Hand2)等。
DM-Tac W是全球首款多维高分辨率高频率视触觉传感器,创新性地将摄像头集成至传感器内部,实现稳定鲁棒的稠密触觉感知能力。每平方厘米覆盖4万个感知单元,可捕捉物体接触时的形貌、纹理、软硬、滑移、按压力、切向力等多种模态信息。
DM-Hand1,具有丰富的自由度,结合力位混合控制算法,可模拟人手实现精准的抓取操作。采用了戴盟全球首款毫米级厚度的视触觉传感器,微型化设计极大地降低了灵巧手的手指厚度,提高了机器人的灵活性和适应性。
小结:人形机器人触控传感器的技术创新正从单一功能向“仿生+智能”跃迁,未来3-5年,具备自学习能力、多模态感知和柔性适应性的触觉系统将成为企业竞争的核心壁垒。触控传感器使人形机器人从“机械执行工具”向“拟人化交互伙伴”演进,未来随着柔性电子、AI算法和边缘计算的进步,触觉感知将成为机器人智能化的重要标志。
-
人形机器人
+关注
关注
7文章
773浏览量
17729
发布评论请先 登录
ADI人形机器人的“感觉神经 + 电力神经元”核心芯片方案盘点
触觉传感器已在亚马逊仓储机械臂率先商用 新增形式有望加速市场增长节奏

灏存科技:通过穿戴传感器设备,隔空操控人形机器人
ST、汉威科技和纽迪瑞入局人形机器人,多家企业亮出关键传感器

基于IMX219和IWR6843ISK的人形机器人毫米波雷达感应和传感器融合

汉威科技柔性触觉传感器:为人形机器人装上“中国触觉”

洞察:人形机器人传感器产业链概览

【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
这批中国企业,在做人形机器人触觉传感器
一文讲透人形机器人常用的四类感知传感器:视觉、力/力矩、触觉、IMU






 工商网监
工商网监
评论