 如何破解GPU集群集合通信路径的“黑盒”难题?
如何破解GPU集群集合通信路径的“黑盒”难题?

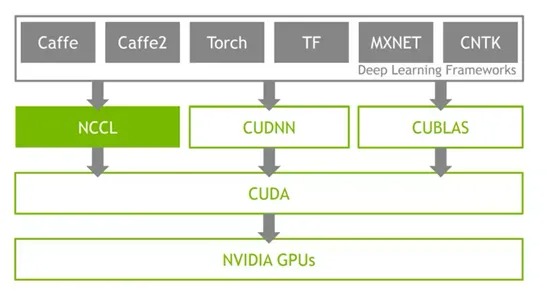
在分布式AI训练场景中,GPU集合通信路径是支撑多节点协同计算的核心基础设施。通过集合通信库(如NVIDIA NCCL、华为HCCL等),跨GPU的数据交换(AllReduce、Broadcast等操作)得以高效执行,从而实现大规模模型参数的同步与梯度聚合。
然而,随着智算集群规模的扩展,通信路径的复杂性呈指数级增长,暴露出以下技术难题。
路径黑盒化:现有集合通信库(Collective Communication Libraries, CCLs)对用户屏蔽底层通信细节(如物理拓扑、网卡绑定策略、路由选择),导致性能瓶颈难以定位。
异构环境兼容性:多厂商CCLs(如ACCL、TCCL)的差异化实现,增加了跨平台部署与调优的复杂度。
动态资源适配不足:传统静态路由规划无法适应动态负载变化,易造成网络拥塞与带宽利用率低下。
故障溯源低效:训练中断时,需人工排查模型、硬件、网络多层级问题,MTTR(平均修复时间)显著增加。
集合通信路径的架构解析
通信路径的层级划分
GPU集合通信路径涵盖以下核心层级:
- 节点内通信:通过NVLink/PCIe实现多GPU间P2P直连,依赖CUDA驱动层优化。
- 跨节点通信:基于RDMA(如RoCEv2)协议,通过智能网卡(如ConnectX系列)与交换机构建低延迟、高吞吐的数据通道。
- 逻辑通信环:NCCL等库根据硬件拓扑自动构建逻辑环形/树形结构,优化数据流并行性。
现有方案的局限性
尽管NCCL通过拓扑感知算法优化通信效率,但其运行时仍存在以下缺陷:
- 路径不可观测:用户无法获取通信环的实际物理路径(如交换机端口映射、QoS策略)。
- 配置僵化:缺少动态路由调整机制,无法感知网络拥塞或链路故障。
- 诊断信息碎片化:日志分散于各节点,缺乏全局视图与关联分析能力。
EPS(E2E Path Scheduler,端到端路径规划)的技术实现
架构设计目标
EPS旨在打破集合通信的“黑盒”状态,提供以下核心能力:
- 全路径可视化:实时映射逻辑通信环至物理网络拓扑。
- 智能路由优化:基于实时流量状态生成最优路径配置。
- 自动化运维:通过API驱动网络设备策略下发,减少人工干预。
关键技术模块
通信环解析与拓扑重构
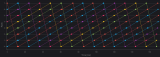
EPS通过解析NCCL日志中的ncclTopoGraph结构,提取逻辑GPU通信组(如Ring、Tree),并关联物理设备信息(GPU UUID、网卡端口号)。结合LLDP协议与交换机CLI查询,动态构建端到端路径拓扑图(如图1)。
 图1:EPS通信环与物理拓扑的映射示意图
图1:EPS通信环与物理拓扑的映射示意图路由规划算法
采用混合式路径选择策略:
- 静态权重分配:基于链路带宽、延迟、丢包率构建代价模型。
- 动态负载均衡:集成Prometheus监控数据,实时感知队列深度与ECN标记,触发路径重计算。
- 容灾路由:预设多路径冗余,在链路故障时自动切换至备份路径。
如何使用 EPS?
安装配置
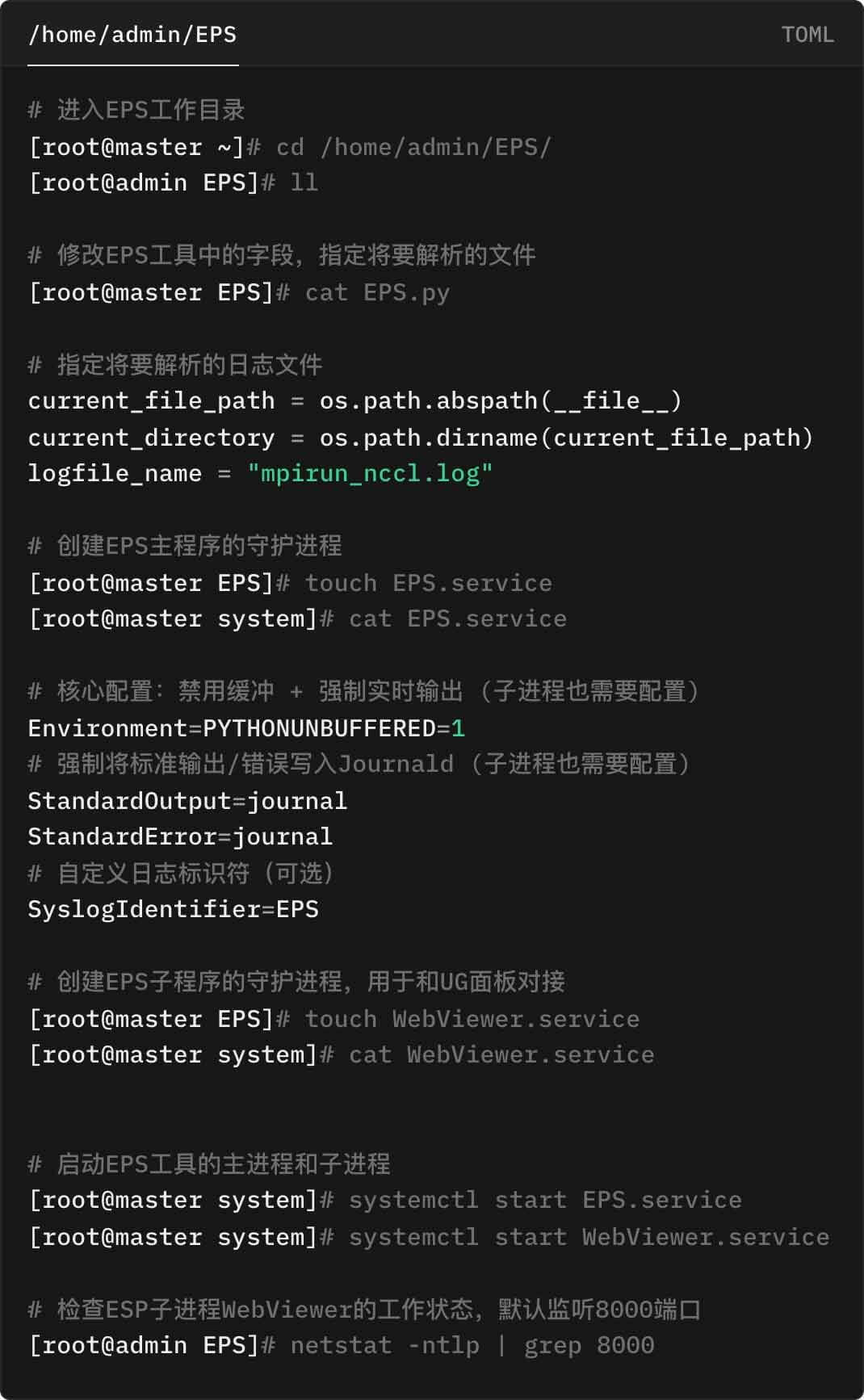
演示环境中的 Master 节点为一台独立的 CentOS 服务器,项目指定的工作目录为 /home/admin/EPS
配置控制面板
演示使用 EasyRoCE Toolkit 内的统一监控面板(UG,Unified Glancer),在此之前需要提前完成该平台的部署,请参阅:一文解读开源开放生态下的RDMA网络监控实践 中的“监控平台配置”部分。
我们只需要为 UG 再添加一个呈现 HTML 的 Pannel,并完成 HTML 源的配置(如下图所示),EPS 解析出来的集合通信环信息就将作为各类 RDMA 网络相关监控指标信息的补充,辅助集群设施调优决策。
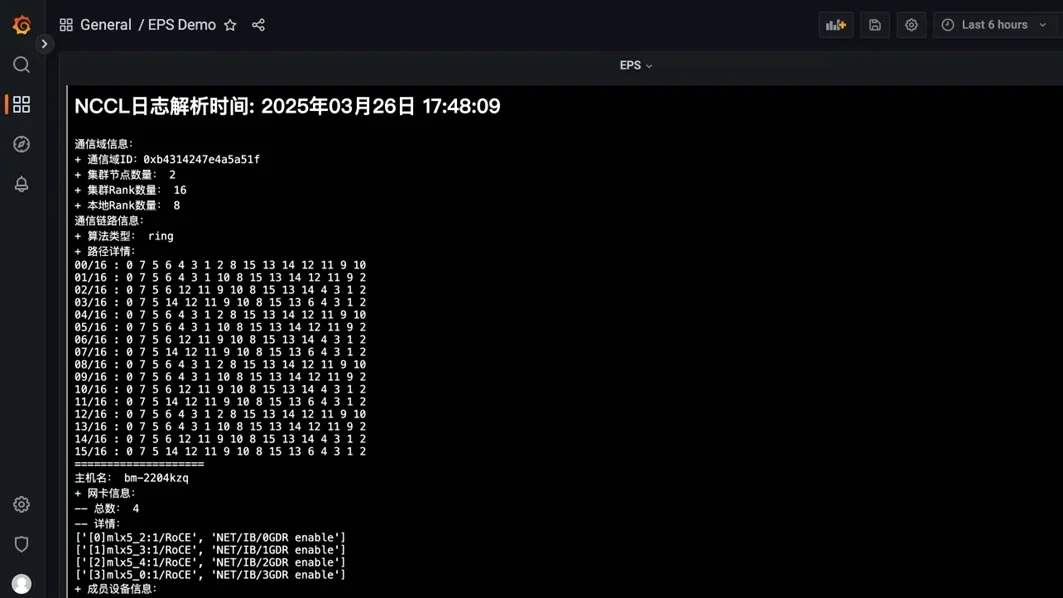
完成以上所有步骤,我们就可以在 UG 看到实时更新的集合通信库运行信息,手动更新NCCL 日志文件,可以看到 UG 中呈现的解析信息也同步刷新。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
gpu
+关注
关注
28文章
4979浏览量
132075 -
AI
+关注
关注
88文章
35748浏览量
282379 -
分布式
+关注
关注
1文章
1009浏览量
75620
发布评论请先 登录
相关推荐
热点推荐


云翎智能巡检终端:以“北斗+”破解森林巡检“最后一公里”难题
终端通过集成单北斗高精度定位、多模态感知融合、自主可控通信等技术,构建起“空天地一体化”巡检体系,为破解这一难题提供了智能化解决方案。云翎智能单北斗巡检终端一、技术

AGV通信第2期 AGV集群智能路径规划解决方案
在智能制造加速发展的背景下,AGV作为智慧物流的核心载体,其路径规划的智能化水平直接影响工厂的运作效率。在工厂物流升级过程中,企业面临以下技术挑战: ? 动态环境适应:复杂工况下需实时避障并保持最优

高校宿舍改造指南:智能水电计费系统如何破解管理难题?
安科瑞解决方案,校园管理难题一应俱全,全方位破解。采用智能硬件+云平台,实现高效管理闭环精准计量,安全防控,一键拉合闸,多支付,后付费模式,能耗分析,赋能绿色校园实时监测,成功案例,降低管理难度,提高学生满意度。
商业综合体到智慧园区:ADW600 如何破解多场景用电难题
在数字化能源管理需求日益增长的背景下,安科瑞 ADW600 多回路计量模块凭借模块化设计、精准监测与高效通信能力,成为破解商业、工业、园区等多场景用电难题的关键方案。其灵活部署、安全预警及数据驱动

电力行业应用案例:顶坚防爆巡检记录仪如何破解高危场景取证难题
在电力行业中,高危场景取证一直是一个重要而困难的问题。防爆巡检记录仪作为一种专门设计用于高危环境的记录设备,能够有效破解这一难题。顶坚防爆巡检记录仪通过以下创新设计和功能,有效破解取证难题

中兴通讯AiCube:破解AI模型部署难题
,成为制约技术价值释放的新痛点。 异构算力适配困难、算力资源利用率低以及数据安全风险高等问题,让许多企业在AI技术的实际应用中遇到了瓶颈。这些问题不仅增加了部署的难度,还可能导致资源的浪费和潜在的安全威胁。 为了破解这一难题,中兴通讯推
GPU 性能原理拆解
「迷思」是指经由人们口口相传,但又难以证明证伪的现象。由于GPU硬件实现、驱动实现是一个黑盒,我们只能通过厂商提供的API、经过抽象的架构来了解并猜测其原理。因此坊间流传着各种关于与GPU打交道

集合通信与AI基础架构
人工智能集群的性能,尤其是机器学习训练集群,受到神经网络处理单元NPUs(即GPU或TPU)之间并行计算能力的显著影响。在我们称为纵向扩展scale-up和横向扩展scale-out设计中,NPUs
小米加速布局AI大模型,搭建GPU万卡集群
近日,有消息称小米正在紧锣密鼓地搭建自己的GPU万卡集群,旨在加大对AI大模型的投入力度。据悉,小米的大模型团队在成立之初就已经拥有了6500张GPU资源,而现在他们正在进一步扩大这一规模。 针对

案例验证:分析NCCL-Tests运行日志优化Scale-Out网络拓扑
GPU并行计算中需要大规模地在计算节点之间同步参数梯度,产生了大量的集合通信流量。为了优化集合通信性能,业界开发了不同的集合通信库(xCCL),其核心都是实现 All-Reduce,这






 工商网监
工商网监
评论