 中国科学院:电鳗启发离子电子人造皮肤,具有多模态感知和传感器内储层计算功能
中国科学院:电鳗启发离子电子人造皮肤,具有多模态感知和传感器内储层计算功能

作为最大的感觉器官,人体皮肤能够响应触觉、热学和电学刺激产生离子信号,这些信号随后传递给神经元并由大脑处理,从而实现感知和记忆,最终促进意识感知和决策。然而,现有的人工皮肤面临着重大挑战,包括无法同时实现多模态感知和记忆(即触觉、热学和电学刺激),难以检测超低电流,以及在高效传感器内储层计算所必需的丰富突触行为方面存在局限性。受电鳗的启发,本研究开发了一种基于离子电子p-n结的人工皮肤,该p-n结由PolyAT和PolyES双层结构组成。这种皮肤具有宽广的温度检测范围(-80至120°C,远超水凝胶对应物)、压力检测范围(0.075 Pa至400 kPa,属于报道过的最高灵敏度之一)和电流检测范围(1-200 nA),同时表现出丰富的突触行为和记忆功能。此外,将这种离子电子皮肤集成到机械手上,可以按需抓取不同温度和重量的物体。更进一步,在离子电子皮肤上实现了完全基于忆阻器的传感器内储层计算,允许通过电刺激进行感知、解码和学习,在分类MNIST手写数字图像方面实现了91.3%的准确率。
正文图文解读
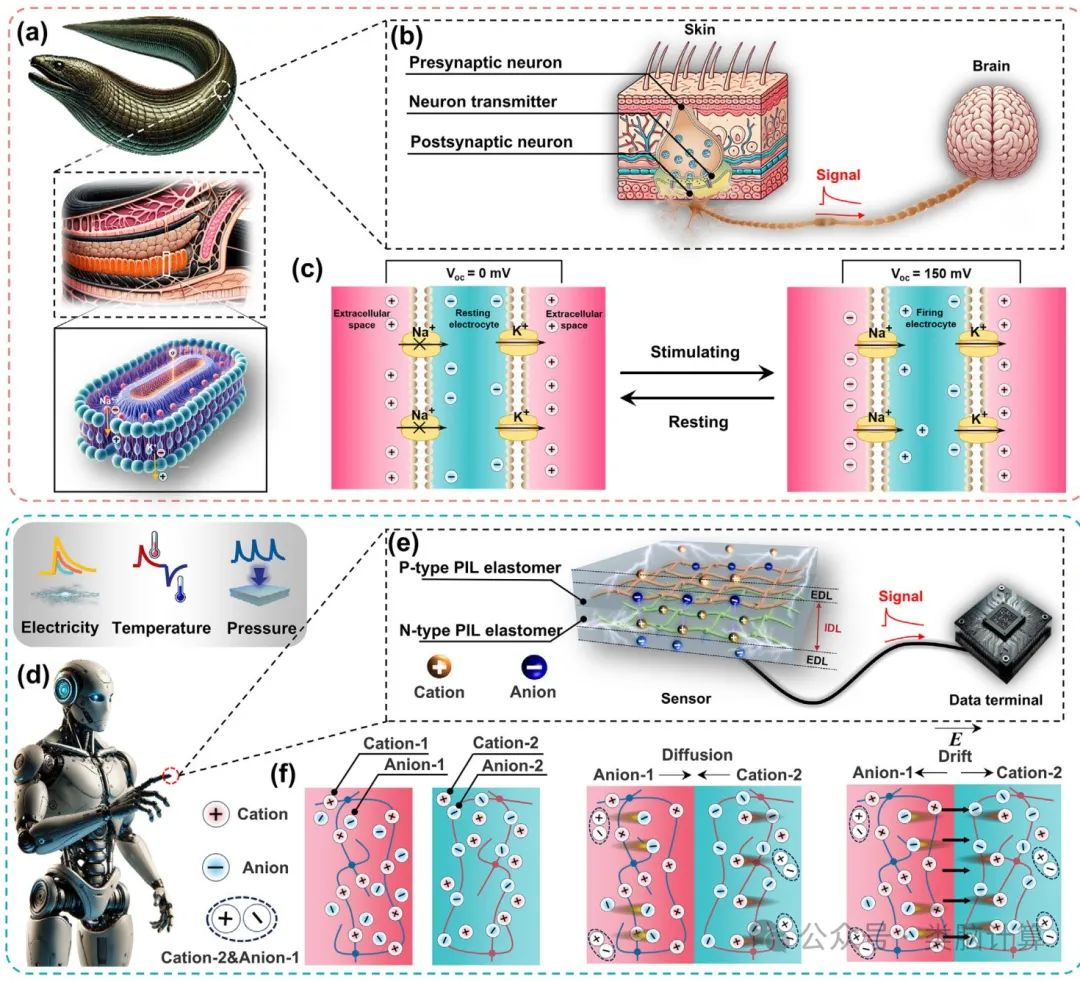
图1. a) 电鳗。下方第一个插图显示了电鳗发电器官内发电细胞的排列。下方第二个插图显示了放电状态下的离子通量。b) 电鳗电感受器的结构。c) 发电细胞中电压产生的机制。d) 仿生人工皮肤集成在机器人手指上用于多模态感知和记忆的示意图。e) 人工皮肤的结构。f) PIL弹性体通过平衡两个并发过程形成异质结。
解读:该图展示了本研究的生物灵感来源——电鳗,及其发电机制。电鳗的发电器官由数千个发电细胞组成,这些细胞在静息状态下内外电压差极小,但在受刺激时能产生显著的电位差。这种生物“二极管”的结构启发了研究人员设计新型人工皮肤。图1d-f示意性地展示了基于此原理构建的、用于多模态感知与记忆的仿生人工皮肤结构及其离子p-n异质结的形成机制。 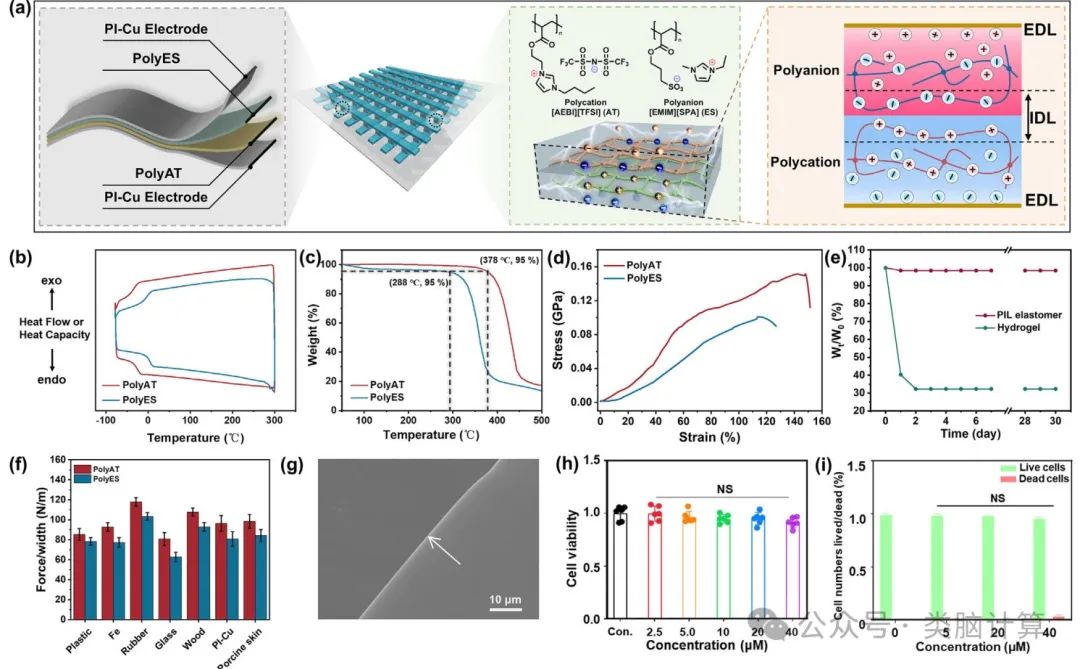
图2. a) 基于PIL弹性体二极管的人工皮肤用于多模态感知和记忆的示意图。b) PolyAT和PolyES的DSC和c) TGA表征。d) PolyAT和PolyES的应力-应变曲线。e) 水凝胶和PIL弹性体在室温下储存时间的重量损失。f) 通过90°剥离测试量化的PolyAT和PolyES在各种基底上的粘附强度。g) 通过SEM观察到的PolyAT和PolyES之间的界面结合。h) 通过CCK-8实验验证材料的生物相容性结果。i) 通过细胞荧光成像分析验证材料的生物相容性。
解读:图2详细介绍了构成人工皮肤的聚离子液体(PIL)弹性体材料PolyAT和PolyES的特性。图2a展示了人工皮肤的结构示意。图2b和2c的差示扫描量热法(DSC)和热重分析(TGA)结果表明,这两种材料具有较低的玻璃化转变温度和良好的热稳定性(PolyAT约288°C,PolyES约378°C开始显著失重)。图2d的应力-应变曲线显示它们分别具有150 kPa和100 kPa的弹性模量,满足柔性和可穿戴设备的需求。图2e证明了PIL弹性体相比于水凝胶具有优异的溶剂保持能力,30天后质量损失小于3%,而水凝胶两天内几乎完全失水。图2f显示了PolyAT和PolyES对多种基底(如PET、玻璃、橡胶、金属和木材)均表现出优异的粘附性能。图2g的扫描电子显微镜(SEM)图像证实了PolyAT和PolyES之间形成了紧密无缝的界面。图2h和2i通过CCK-8实验和细胞荧光成像证明了PolyAT和PolyES具有良好的生物相容性,细胞存活率与对照组无显著差异。 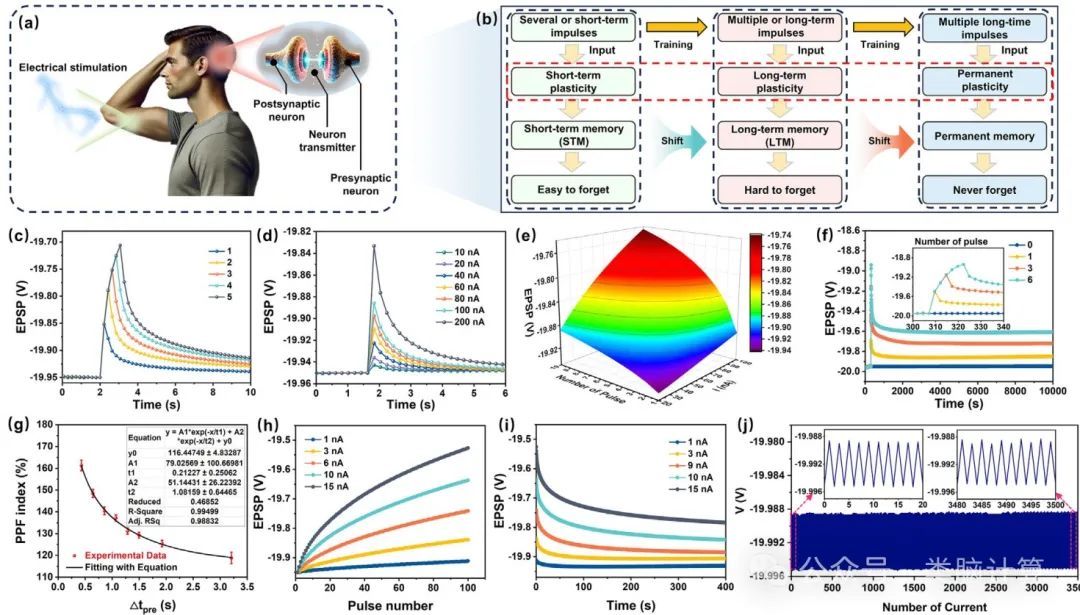
图3. a) 人类在电刺激后的记忆行为。b) 突触可塑性与记忆功能之间关系的示意图。PIL弹性体二极管的电压响应 c) 在不同脉冲数量下(电流强度750nA,脉冲宽度0.22s),d) 在不同电流强度下(脉冲宽度0.2s),以及 e) PIL弹性体二极管的二维(电脉冲强度和数量)感知能力。f) 在不同脉冲数量下(电流强度200nA,脉冲宽度2.5s)。g) PPF指数作为时间间隔的函数。h) 脉冲数量增加到100次时的LTP(脉冲宽度0.2s)。i) 在不同电流强度下,100次脉冲刺激后从STP到LTP的转变。j) 超过3500次写入-擦除循环的稳定性。
解读:该图展示了PIL弹性体二极管在电刺激下的类脑学习与记忆行为。如图3a、b所示,人工皮肤能够响应电流刺激,输出随输入电流脉冲幅度和数量变化的电压信号,模拟了兴奋性突触后电位(EPSP)、配对脉冲易化(PPF)、短时程可塑性(STP)、长时程可塑性(LTP)、短时记忆(STM)和长时记忆(LTM)等基本特征。图3c、d、e表明输出电压及其保持时间随电流强度和脉冲数量的增加而增加,类似于外部刺激后从STM到LTM的转变。图3f显示增加脉冲宽度和强度可将器件输出电压的保持时间延长至10^4秒以上,类似人脑的永久记忆。图3g展示了PPF行为,其指数与生物突触中的观察结果相当。图3h、i通过施加100个连续脉冲成功模拟了从STP到LTP的转变,电压随脉冲数量渐进增加,保持时间显著延长。图3j则证明了器件在超过3500次重复写入/擦除循环后仍具有出色的耐久性。 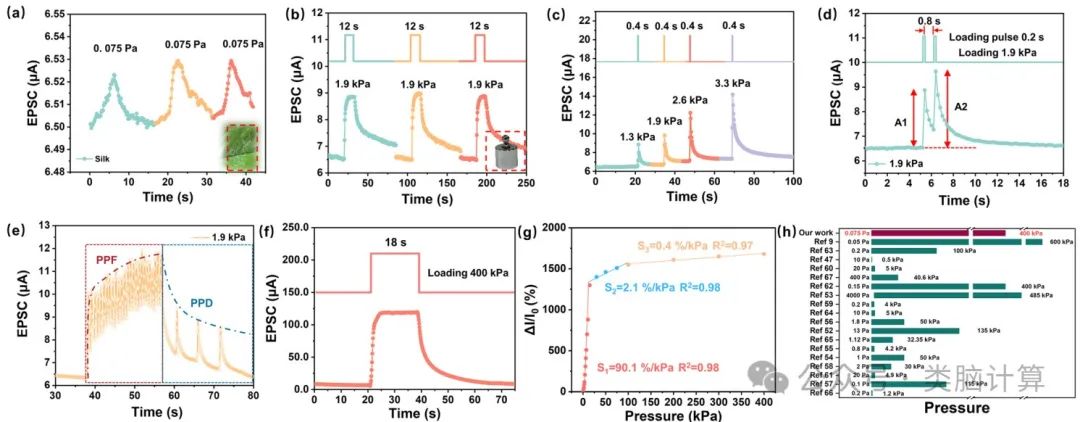
图4. a) 丝绸和 b) 重物触发的EPSC。c) 由各种加载尖峰触发的EPSC。d) 由一对加载脉冲(1.9kPa,0.2s)以0.8s间隔触发的EPSC。e) 不同间隔长度的一系列连续压力脉冲下的EPSC。f) 加载和释放400kPa压力时的响应和弛豫时间。g) 传感器对压力的灵敏度及其线性范围。h) 与先前研究的压力传感范围比较。
解读:此图展示了人工皮肤的触觉感知能力。如图4a所示,传感器在接触丝绸(约0.075 Pa)时能产生明显且可重复的信号,证明其对超低压力的稳定性和准确性,类似于人类的轻触感。图4b显示当施加1.9 kPa压力时,传感器快速响应,移除物体后表现出明显的滞后效应,类似于人类的压力感。图4c显示单个压力脉冲(1.3 kPa,0.4 s)触发了达到8.86 μA的兴奋性突触后电流(EPSC),移除压力后EPSC迅速衰减并逐渐恢复基线,这与人脑的记忆行为非常相似,且EPSC值可通过压力强度调节。图4d展示了两个连续压力脉冲(1.9 kPa,0.2 s)引发的PPF行为,PPF值为132%。图4e表明这种PPF行为高度依赖于压力脉冲的间隔,短间隔增加EPSC值,长间隔则导致成对脉冲抑制(PPD)。图4f显示传感器能准确感知高达400 kPa的超高压。图4g显示传感器在0-400 kPa压力范围内具有优异的灵敏度特性,尤其在0-30 kPa的低压范围内,灵敏度高达90.1%/kPa。图4h通过与先前研究比较,突显了该传感器实现的0.075 Pa至400 kPa检测范围是同类材料中报道的最宽检测范围之一。 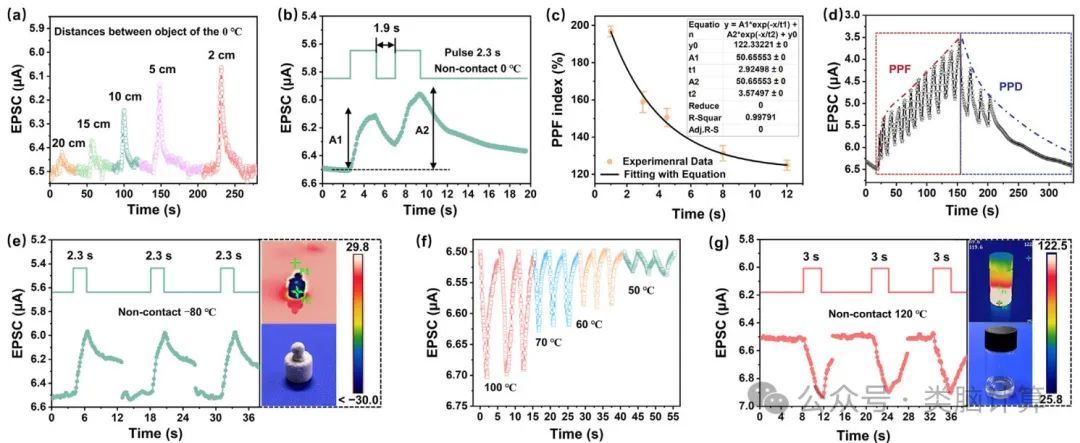
图5. a) 在不同距离下,0°C物体触发PIL弹性体皮肤产生的EPSC。b) 由一对温度脉冲(0°C,2.3s)以1.9s间隔触发的EPSC。c) PPF指数作为时间间隔的函数。d) 不同间隔长度的一系列连续温度脉冲下的EPSC。e) 由-80°C物体触发的EPSC,f) 50-100°C(2s)物体触发的EPSC,以及g) 120°C物体触发的EPSC(所有温度源均距离传感器5cm)。
解读:本图展示了人工皮肤的温度感知能力。如图5a所示,当PIL弹性体二极管接近0°C物体时,电流变化随距离的减小而反向增大。图5b显示,施加两个连续的温度脉冲(0°C,2.3 s)时观察到PPF行为,计算得到的PPF值为128%。图5c显示了PPF指数随时间间隔的变化,其拟合结果与生物突触相似。图5d进一步揭示PPF行为高度依赖于温度脉冲的间隔:短间隔(如10s)增加EPSC值,而长间隔(如20s)则导致PPD。如图5e-g所示,该传感器能够在非接触传感模式下有效检测从-80°C到120°C的宽广温度范围,并具有出色的可重复性,这远超传统水凝胶基人工皮肤的性能。这种能力不仅有助于防止因直接接触高温源造成的皮肤灼伤,还能实现多种应用,如非接触式预警系统。 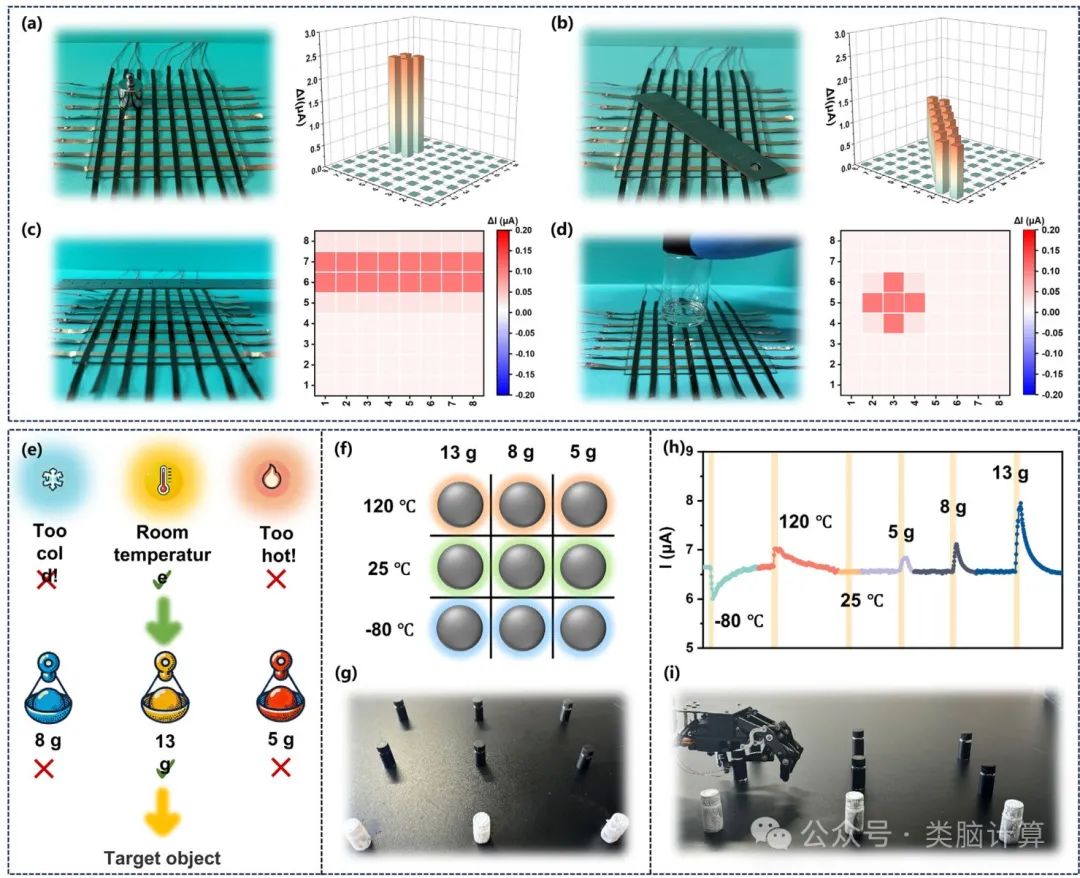
图6. a) 8x8传感器阵列对重物和 b) 刀片的响应。c) 8x8传感器阵列对50°C钢尺和 d) 装有50°C硅油的玻璃瓶的响应。e) 机器人手臂抓取指定温度和重量目标物的示意图。f) 不同温度和重量物体的示意图和 g) 照片。i) 机器人手臂根据 h) 响应曲线抓取物体(所有温度源均距离传感器5cm)。
解读:该图展示了基于PIL弹性体二极管的8x8传感器阵列在同时感知和映射压力与温度分布方面的能力,以及其在机器人应用中的潜力。图6a和6b显示,传感器阵列能够通过监测不同位置的电流变化,成功定位并识别不同物体(如重物和刀片)施加的压力位置和大小。图6c和6d表明,当不同温度的物体(如50°C的钢尺或装有50°C硅油的玻璃瓶)接近传感器阵列时,靠近热源的传感单元电流变化更显著,从而能够准确判断物体的位置及其与传感器的距离,实现空间温度分布的检测。图6e示意了将该传感器集成到机械手上,使其能够像人手一样感知物体的温度和压力。实验中(图6f、g、h、i),机械手需要从九个未知温度(-80、120、25°C)和质量(5、8、13 g)的物体中进行选择。通过分析物体的温度和质量数据,机械手能够智能地选择具有期望温度和质量的目标物体,展示了其在处理复杂任务方面的感知决策能力和效率提升。 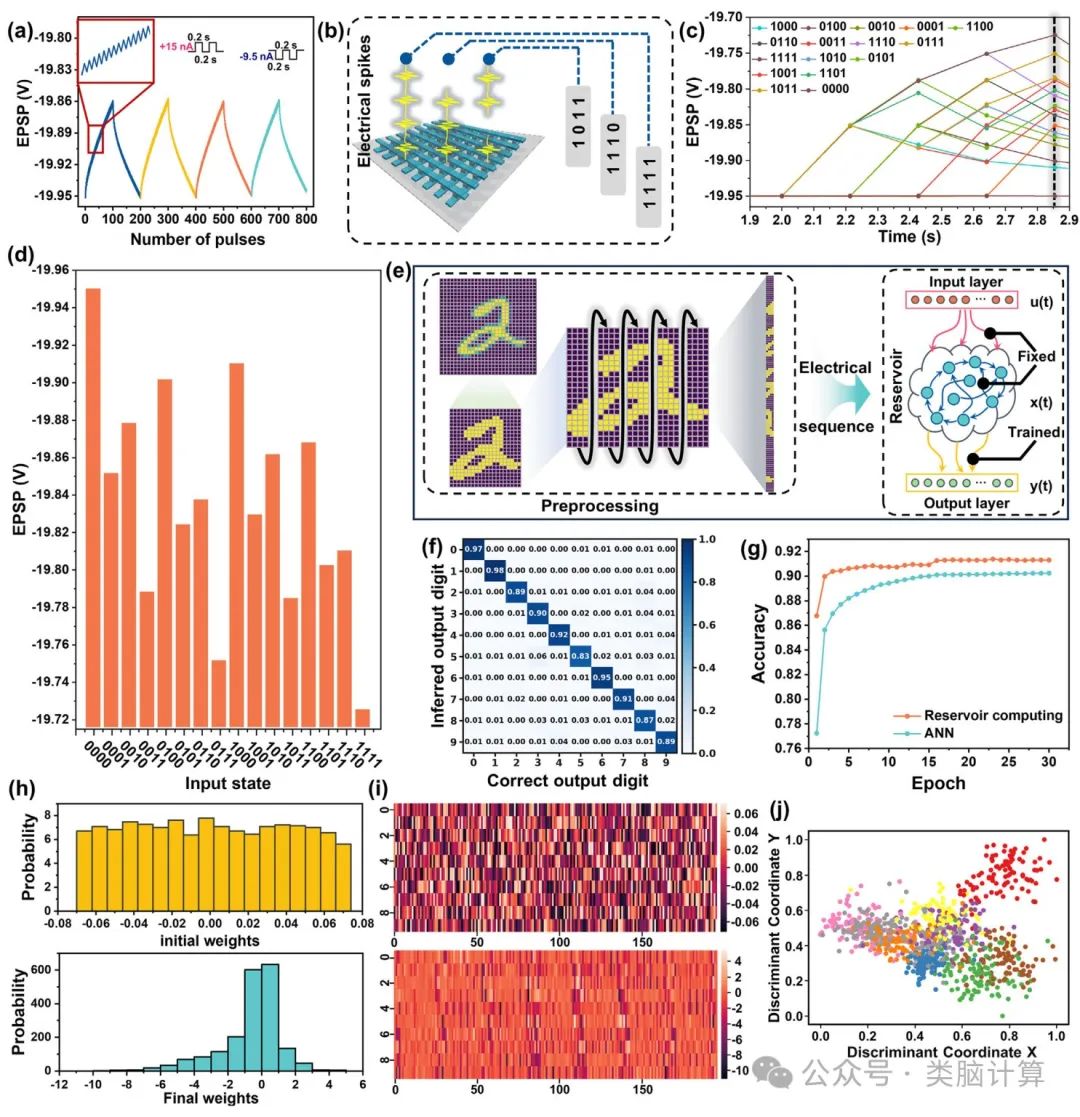
图7. a) 由100个脉冲序列触发的PIL弹性体二极管的多位电导演化。b) 应用于PIL弹性体二极管的电脉冲序列示意图。c) 基于PIL弹性体二极管的RC对16种不同脉冲流的电响应(电脉冲频率:1.17Hz)。d) 16种脉冲刺激组合下储层状态的初始和最终电压值。e) 用于分类MNIST数据集的RC系统示意图。f) PIL弹性体二极管RC系统识别MNIST的混淆矩阵。g) 识别结果。青色和橙色曲线分别对应软件和基于PIL弹性体二极管的RC系统的分类准确率。h) 训练前/后对应的PIL弹性体二极管阵列电导分布的初始(上图)/最终(下图)状态。i) 训练前/后的电导分布。j) 使用LDA对储层输出进行降维。
解读:本图展示了利用PIL弹性体二极管的电脉冲触发的长时程记忆(LTM)和短时程记忆(STM)行为,构建了一个完全基于忆阻二极管的传感器内储层计算(RC)系统。该系统可以直接从电信号中学习和推断,无需专用的电传感器或数字计算机。图7a显示了在50个正向电脉冲(15nA, 0.2s)和50个负向电脉冲(-9.5nA, 0.2s)作用下,PIL弹性体二极管出现的多级增强和抑制状态,这些多位状态是RC系统实时学习能力的基础。图7b展示了施加到二极管的电脉冲序列。图7c和7d显示,16种从(0000)到(1111)的电脉冲序列(“1”代表150nA电流,“0”代表0电流,脉冲宽度0.21s)能产生16个清晰可辨的状态,展示了将复杂时空信号映射到存储状态的强大能力。图7e描述了用于分类MNIST手写数字(28x28像素图像,预处理后reshape为4x110的电脉冲序列)的RC系统。图7f的混淆矩阵显示了良好的分类鲁棒性。图7g的识别结果表明,基于PIL弹性体二极管的RC系统实现了91.3%的准确率,略高于软件模拟的90.2%。图7h和7i展示了读出层中电控存储器件在训练前后的初始和最终电导值及其分布。图7j通过线性判别分析(LDA)降维,显示了储层提取的特征向量在二维空间中良好聚类,证明了电控存储器件中STM的非线性转换对特征编码的有效性。
总结与展望
本文的创新点主要包括:
1.仿生设计与材料创新:受到电鳗发电细胞的启发,成功设计并制备了基于PolyAT和PolyES双层结构的离子电子p-n结,构筑了一种柔性、透明且生物相容的离子信号传输传感器。
2.多模态感知与记忆一体化:该离子电子皮肤首次实现了对触觉(0.075 Pa至400 kPa)、热学(-80至120°C)和电学(1至200 nA)三种外部刺激的同步感知和记忆功能,且检测范围宽广。
3.丰富的类脑突触行为:传感器展示了包括EPSC、EPSP、PPF、STP、LTP、STM、LTM以及多位增强和抑制在内的丰富突触行为,为模拟生物神经功能奠定了基础。
4.高效的传感器内储层计算:利用其独特的突触行为,成功构建了传感器内储层计算系统,无需传统计算机辅助,即可对MNIST手写数字进行识别,准确率高达91.3%。
5.优异的综合性能与应用演示:相较于传统水凝胶传感器,该材料具有更优的拉伸性、更宽的电化学窗口、更高的离子电导率以及抗水分蒸发和低温冻结能力。将其集成于机械手,可实现对特定温度和重量物体的精确抓取。
审核编辑 黄宇
-
传感器
+关注
关注
2567文章
53278浏览量
770035
发布评论请先 登录
中国科学院自动化研究所携手中科曙光打造高性能工具链解决方案
中国科学院沈阳自动化研究所:研究基于石墨烯/PDMS封装的医用胶带柔性传感器,用于水下机器人运动检测

恭贺 | 晟鹏创始人成会明院士当选欧洲科学院院士!

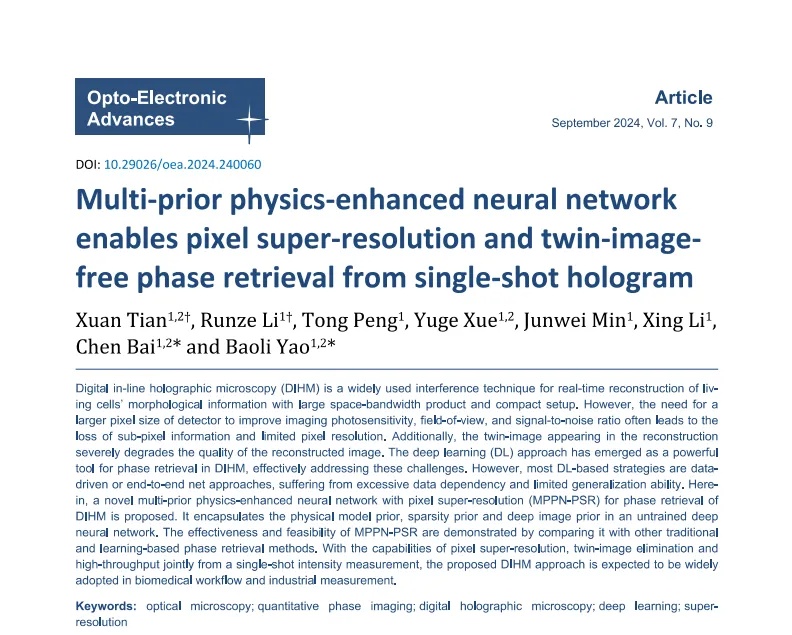
中国科学院西安光机所在计算成像可解释性深度学习重建方法取得进展
澎峰科技亮相第六届中国科学院大学校友创新论坛

普强信息入选2025人工智能感知层创新榜单
研究用于独立检测压力和温度的3D主动矩阵多模态传感器阵列

中国科学院金属研究所选购我司HS-STA-001同步热分析仪

欧洲科学院院士蒋田仔:智能化技术推动脑控和控脑技术发展

吉林大学:研究具有3D力检测功能的自供电柔性电子皮肤触觉传感器
传感器专家郭源生当选2025美国国家人工智能科学院院士
中科驭数受邀出席中国科学院大学校友论坛
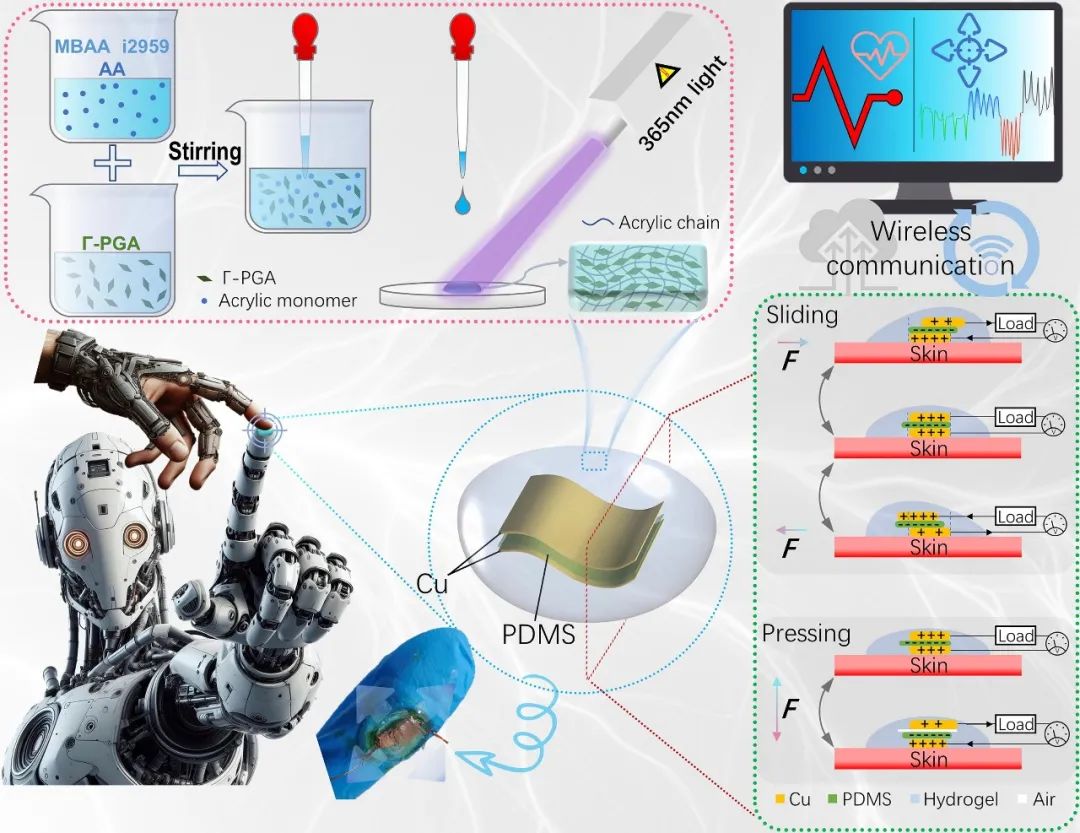
中国科学院西安光机所智能光学显微成像研究取得新进展
中国科学院沈阳应用生态研究所选购我司同步热分析仪






 工商网监
工商网监
评论