 人形机器人“天工”面向行业开源开放
人形机器人“天工”面向行业开源开放

国家地方共建具身智能机器人创新中心昨天宣布启动“天工开源计划”,对外公布创新中心成立一年以来取得的建设成就。
创新中心将陆续把本体、数据集、运动控制等方面的技术成果面向行业开源开放,推动具身智能加快落地。全球高校、科研院所、集成商等可在此基础上再开发,加速推动人形机器人真正进入人类生活。
据介绍,创新中心目前正围绕通用机器人母平台“天工”、多能具身智能体平台“开物”加速技术突破。基于全身协同智能小脑平台,“天工”实测平均时速可达每小时10公里,最高奔跑速度已提升至全球领先的每小时12公里。
此外,“天工”还可在斜坡、楼梯、草地、碎石、沙地多种复杂泛化地形中实现平稳移动;多能具身智能体平台“开物”包含AI大模型驱动任务规划的具身大脑和以数据驱动的端到端技能执行具身小脑,具备一脑多机、一脑多能的能力,未来将拥有200万条机器人轨迹数据,适配超20个以上机器人本体,实现具身能力开发时间降低90%。数据生态方面,创新中心数据采集涵盖6类本体7大典型场景,日产数据已达10TB。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
29939浏览量
214419 -
AI
+关注
关注
88文章
35758浏览量
282451 -
大模型
+关注
关注
2文章
3231浏览量
4225
发布评论请先 登录
相关推荐
热点推荐
图纸代码完全开源!稚晖君:人人都能造人形机器人!
SDK“开源”而大肆宣传不同,智元机器人开源的内容包括硬件和软件的“一站式”技术资源,资料包大小超过1.2GB,完全可以通过图纸和代码自行复现灵犀X1机器人。 灵犀X1:
NVIDIA 通过云端至机器人计算平台驱动人形机器人技术,赋能物理 AI
机器人推理与技能基础模型的首次更新;用于合成运动生成的 NVIDIA Isaac GR00T-Dreams Blueprint;以及用于加速人形机器人开发的 NVIDIA Blackwell 系统
发表于 05-19 17:53
?1106次阅读

全球首个人形机器人半马开跑,“天工”夺冠彰显科技新高度
上的崭新篇章。在激烈的角逐中,北京自主研发的人形机器人“天工1.2Max”脱颖而出,以坚韧不拔的毅力和卓越的性能,成功跑完全程21公里的半程马拉松,力压群雄,一举夺魁!

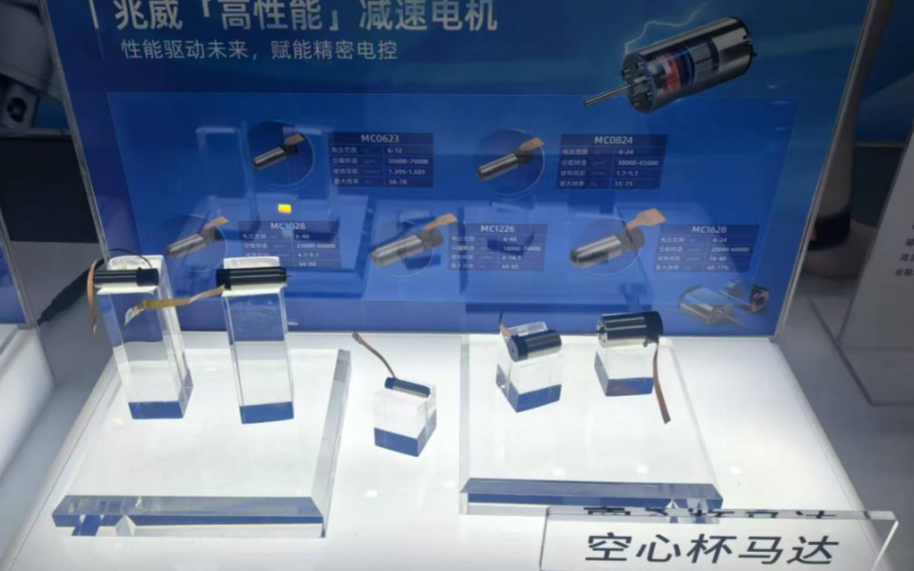
现场直击:马拉松明星“天工机器人”、兆威机电灵巧手等受热捧
电子发烧友网报道(文/黄晶晶)前不久全球首个人形机器人半程马拉松比赛上,“天工Ultra”机器人以2小时40分42秒的成绩率先冲线完赛,夺得冠军。最近深圳
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
末端执行器。
全栈开源
从RISC-V指令集、芯片SDK到机器人控制代码100%开放,开发者可自由定制算法与控制逻辑。
官方apt仓库提供deepseek-r1-distill-qwen-1.5b
发表于 04-25 17:59
从实验室到马拉松赛道的创新实践,开源鸿蒙助力人形机器人产业发展
在近日举办的全球首个人形机器人半程马拉松的赛场上,搭载开放原子开源基金会旗下开源鸿蒙操作系统的“夸父”人

NVIDIA Isaac GR00T N1开源人形机器人基础模型+开源物理引擎Newton加速机器人开发
NVIDIA Isaac GR00T N1开源人形机器人基础模型+开源物理引擎Newton加速机器人开发
2035年出货量将达百万!当下,人形机器人的商业拐点在哪?
电子发烧友原创 章鹰 3月17日,上海机器人企业傅利叶正式开源全尺寸人形机器人数据FourierActionNet, 首批上线超3万条高质量真机训练数据。同一天,美国

中科本原推出面向人形机器人的关节电机解决方案
在人工智能与高端制造的浪潮中,人形机器人正从科幻想象加速迈向现实。从特斯拉Optimus的工厂分拣到优必选Walker的养老陪护,人形机器人凭借类人
伺服电动缸在人形机器人中的应用
将伺服电机自身优势转变成精确速度控制、精确位置控制和精确推力控制,从而实现高精度直线运动。这种特性使其成为人形机器人的核心运动部件,特别是在关节驱动方面。二、替代传统驱动方式在人形机器人
发表于 02-06 09:04
《人形机器人产业地图(2024)》重磅发布!
的地域分布情况,包括人形机器人企业的主要产品、城市分布、供应链环节,为行业内外提供了宝贵的数据支持和市场洞察。 ? 根据最新发布的产业地图,国内的人形
发表于 12-02 09:17
?2661次阅读

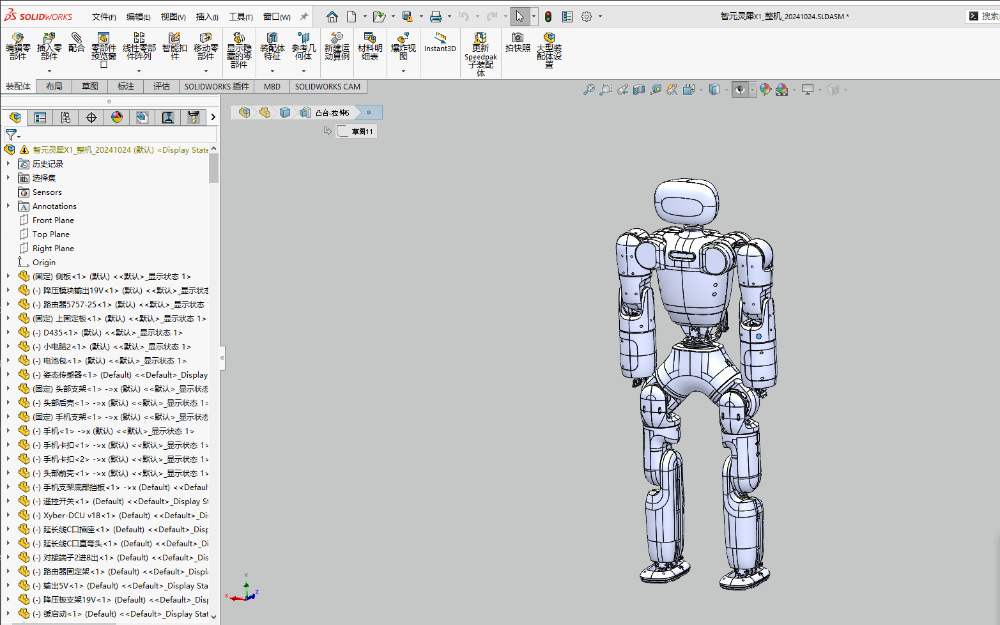
“0元购”智元灵犀X1机器人,软硬件全套图纸和代码全公开!资料免费下载!
10月24日,智元机器人重磅宣布,其自主研发的全栈开源机器人智元灵犀X1面向全球开发者正式开源,智元机器
发表于 10-25 15:20





 工商网监
工商网监
评论