 高精准360°全景环视机器人 稳定的宽电压有源晶振 YSO110TR,实现智能机器人应用
高精准360°全景环视机器人 稳定的宽电压有源晶振 YSO110TR,实现智能机器人应用

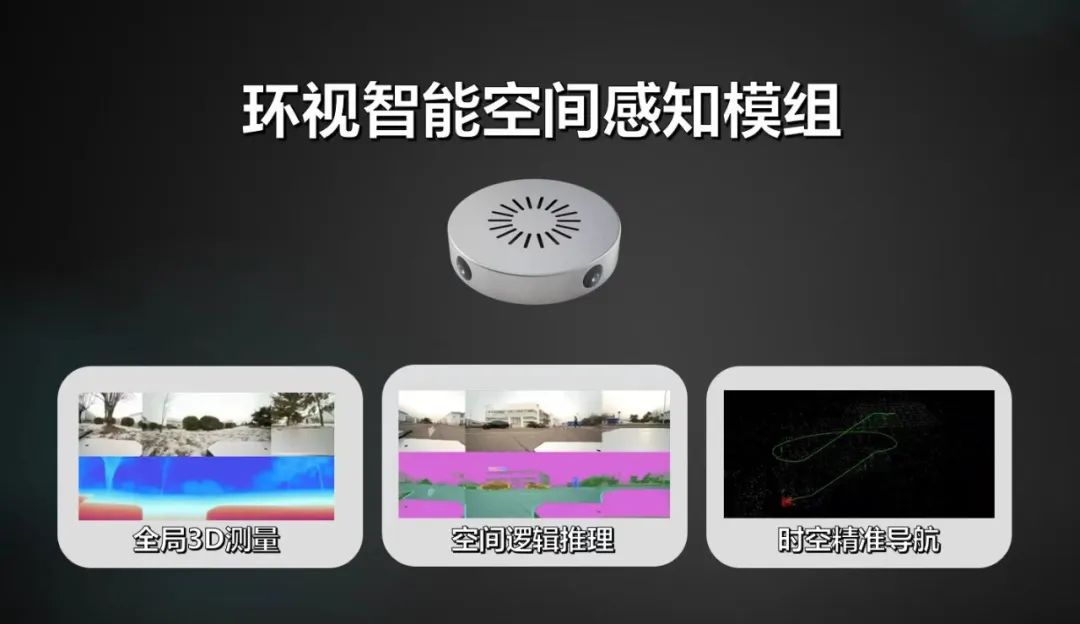
随着科技的进步,机器人技术正不断向前迈进,360°全景环视技术也逐渐成为机器人应用的热点之一。在实现智能机器人的360°全景环视应用中,宽电压有源晶振 YSO110TR扮演着至关重要的角色,为机器人提供稳定可靠的时钟信号,助力其实现全方位的环境感知和智能操作。
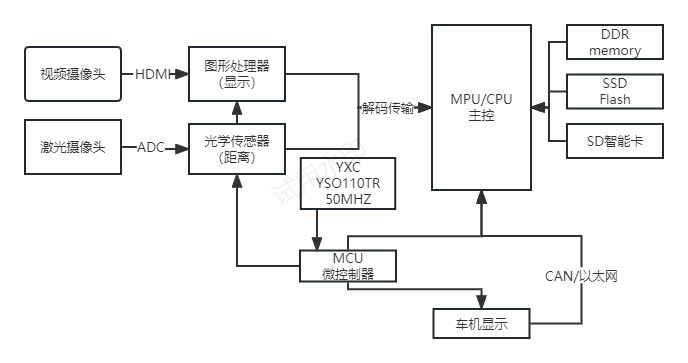
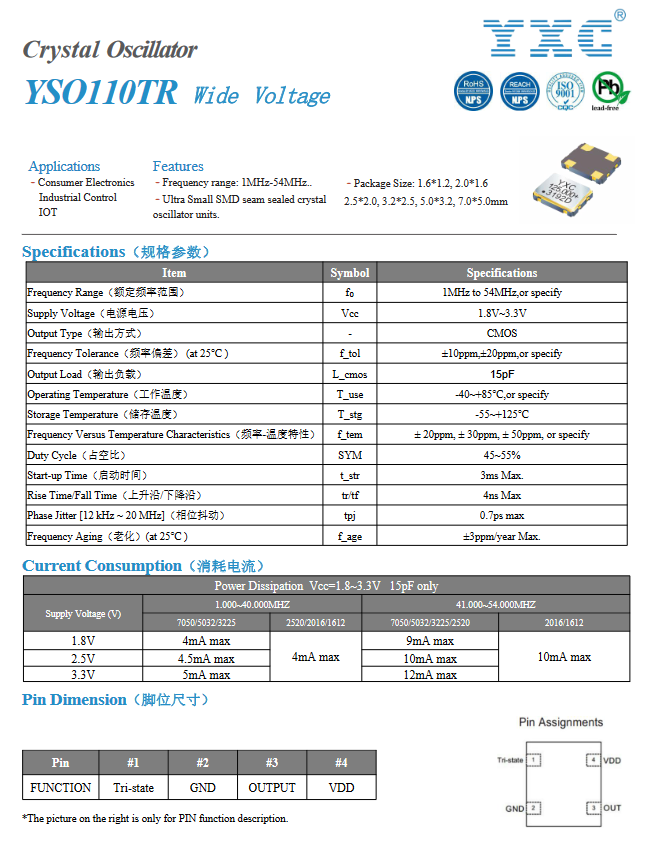
YSO110TR是一款高性能的宽电压有源晶振,拥有50MHz高稳定性频率,-40~﹢85℃温度范围内总频差±30PPM,为360°全景环视提供精准的基准时钟频率。其稳定性和高精度特性,确保机器人在复杂多变的环境中能够准确感知周围环境,做出智能决策。
YSO110TR采用主流封装尺寸3.2*2.5mm,供应稳定,性价比高,使其在智能机器人的集成和布局上更加便捷。同时,它具备宽电压范围1.8V-3.3V,灵活满足不同方案设计,为机器人的不同模块和部件提供适配能力。
除此之外,YSO110TR还具备良好的抗震、抗冲击、抗EMI特性,符合汽车严苛的工作环境要求。这使得它在汽车360°环视系统等机器人应用中能够稳定可靠地工作,提供持续稳定的时钟信号。
宽电压有源晶振YSO110TR在机器人的360°全景环视应用中具有关键作用。其高精准、稳定可靠、宽电压范围和抗震抗冲击特性等优势,为机器人的全方位感知和智能操作提供了可靠的时钟信号支持,助力机器人技术在智能化的道路上不断前行。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
29939浏览量
214414 -
有源晶振
+关注
关注
1文章
934浏览量
21453 -
宽电压
+关注
关注
0文章
43浏览量
9874
发布评论请先 登录
相关推荐
热点推荐
机器人视觉企业环视智能完成千万级天使轮融资,推动通用智能机器人感知技术的产业化落地
? 近日,机器人视觉企业成都环视智能科技有限公司(以下简称“环视智能”)宣布完成千万级天使轮融资。本轮由天润嘉诚和成都
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、
发表于 07-26 11:22
晶振在机器人领域的应用
随着国内首个人形机器人全产业链专业展在杭州召开,从特斯拉到宇树科技,从减速器到伺服控制器,从仿生驱动到脑机接口,人形机器人正在成为全球科技竞逐的下一个战场。而在这场高调亮相的科技浪潮背后,有一种元件虽不发光发热,却是整机动作节奏的关键——
明远智睿SSD2351开发板:语音机器人领域的变革力量
连续的长句语音识别,还是复杂口音的处理,都能快速响应,保证语音机器人与用户之间流畅的对话体验。 其丰富的接口为语音机器人的功能拓展提供了可能。USB接口可以连接高灵敏度的麦克风阵列,实现精准
发表于 05-28 11:36
盘点#机器人开发平台
图,电子技术资料网站具身智能机器人****开发平台——Fibot广和通发布机器人开发平台-电子发烧友网NVIDIA Isaac 英伟达综合性机器人开发平台NVIDIA Isaac 是英
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
机场智能指路机器人主要依靠感知系统、定位系统、导航系统、智能交互系统和运动系统协同工作,来实现为旅客准确指路和提供服务的功能,以下是其详细工作原理:
感知系统
传感器类型 :
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
《ROS 2智能机器人开发实践》内容阅读初体验
《ROS 2 智能机器人开发实践》是一本针对 ROS 2(Robot Operating System 2)这一先进
发表于 04-27 11:24
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
Jazzy长期稳定版推出,这也代表着ROS 2走向成熟。《ROS 2智能机器人开发实践》 一书全部代码便基于长期稳定版撰写。
ROS的发展
从2012年开始,使用ROS的人越来越多,
发表于 03-03 14:18
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】+两本互为支持的书
如何使用PyTorch进行数字图像处理,它借助摄像头来获取视频的图像信息,然后通过已有的图像识别框架模型经深度学习和优化以达到更精准的识别结果,从而为进一步的执行处理提供数据支持和依据。而《具身智能机器人系统
发表于 01-01 15:50
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
中取得了令人瞩目的效果。
阅读感悟
从传统的手动编程到借助大模型实现智能化、自主化,从单一模态的交互到多模态信息的深度融合,再到扩散模型的应用,机器人控制技术正在以惊人的速度进化。这不仅让机器
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
的研发工作奠定了基础。继之而来,北京理工大学在2002年发布的“汇童”系列机器人,实现了无外接电缆的行走。
三、问题与挑战
具身智能虽然取得了一定的进展,但是也面临着诸多的问题与挑战,主要有如下几个方面
发表于 12-28 21:12
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
,互联网行业占成熟经济体的GDP增长的21%,世界经济正面向数字经济转型的大趋势。具身智能机器人集成人工智能、高端制造、新材料等技术,其核心在于通过智能体与环境的动态互动
发表于 12-19 22:26
晶振原理:晶科鑫-晶振机器人的频率控制大师
晶振,全称石英晶体振荡器,以其精准的频率控制能力,为机器人的每一个动作提供稳定的节拍。海外推出仿生Torso





 工商网监
工商网监
评论