 如何验证ROS是否安装成功 ubuntu20.04教程
如何验证ROS是否安装成功 ubuntu20.04教程

验证ROS是否安装成功
按正常来说ROS到这里就安装完成了,现在我们来验证一下,输入以下命令:
roscore
如果出现了以下的问题:Command ‘roscore’ not found, but can be installed with:sudo apt install python3-roslaunch,按照提示输入sudo apt install python3-roslaunch命令并执行,成功后界面如下:
如果出现了以下的问题说明,之前的安装没有安装全
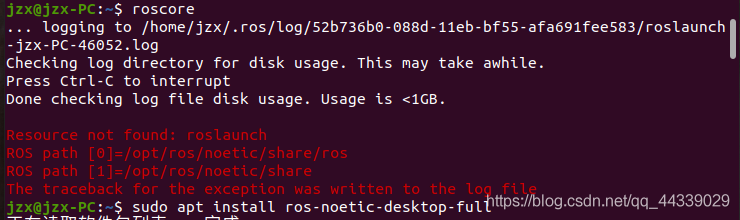
输入以下命令,把没安装的安装一下就好了(如果显示有几个安装包无法下载,是因为网络的原因重新输入以下命令就行了)
sudo apt install ros-noetic-desktop-full
如果出现了以下的问题:

可尝试输入以下命令:
source /opt/ros/noetic/setup.bash
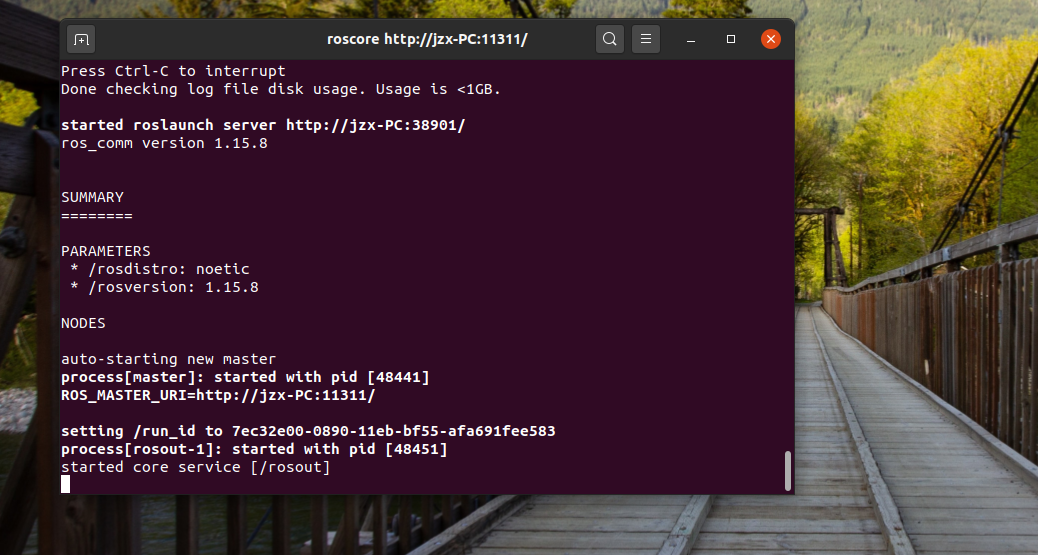
到这里再输入roscore看一下,若安装成功会显示如下界面:
然后我们启动一下小海龟的仿真器试一试,按ctrl+alt+t打开一个新的终端,输入以下命令:
rosrun turtlesim turtlesim_node
按ctrl+alt+t再打开一个新的终端,输入以下命令:
rosrun turtlesim turtle_teleop_key
这时候你按键盘上的↑↓←→键就可以控制小海龟移动了,那么恭喜你的ROS已经成功安装完了。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
命令
+关注
关注
5文章
744浏览量
22975 -
Ubuntu
+关注
关注
5文章
598浏览量
31661 -
ROS
+关注
关注
1文章
288浏览量
17872
发布评论请先 登录
相关推荐
热点推荐
怎样利用Ubuntu20.04去安装Mentor Calibre 2020?
怎样利用Ubuntu20.04去安装Mentor Calibre 2020?有没有人遇到过这个问题啊
发表于 06-23 07:19
如何搭建交叉编译环境?如何验证是否安装成功?
[td]A40i板子在linux编译篇4.5中写到编译前需要确保已经搭建好交叉编译器环境,即交叉编译器安装成功。但是并没有提到如何搭建交叉编译环境,也没有提到如何验证是否安装成功。
发表于 01-13 06:09
在Ubuntu20.04系统中,如何将Vivado编辑器配置成Vim?
我现在使用的系统是ubuntu20.04,安装了2022.1版本的vivado,我想将vivado的编辑器设置成vim,但是我一直无法成功。我尝试将“/usr/bin/vim"添加到
发表于 01-31 10:29
如何制作ubuntu20.04的文件系统
firefly自带的文件系统,由于缺少一些基本功能模块,因此,我们可以自己手动制作一个ubuntu20.04的文件系统。
【ROC-RK3568-PC开发板试用体验】Ubuntu20.04桌面系统体验升级与GCC安装
本文来源电子发烧友社区,作者:李先生, 帖子地址: https://bbs.elecfans.com/jishu_2303743_1_1.html 本视频进行Ubuntu20.04桌面系统体验 并升级系统 安装GCC 体验视频详见作者原贴

ubuntu20.04安装教程
Ubuntu 20.04 的安装步骤如下: 制作启动U盘。首先下载Ubuntu 20.04的镜像文件和UltraISO(镜像制作工具)。然后
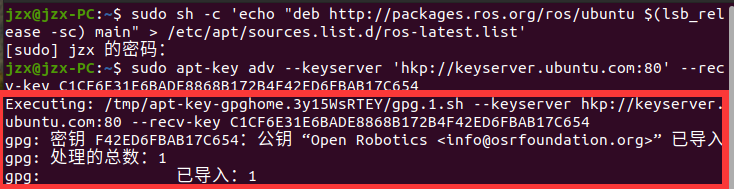
如何在ubuntu20.04中添加和更新ROS软件源
1.添加ROS软件源 将下面这条命令复制到ubuntu的终端执行 sudo sh -c '. /etc/lsb-release echo "deb http
ubuntu20.04设置环境变量方法
设置环境变量 输入下面的这行代码,注意到底是melodic还是noetic或者是kinetic是由你的ubuntu的版本决定的,比如我的ubuntu是20.04版本的,对应的是noetic,也就
【北京迅为】iTOP-LS2K0500开发板快速使用编译环境ubuntu20.04第一章加载迅为提供 Ubuntu20.04
【北京迅为】iTOP-LS2K0500开发板快速使用编译环境ubuntu20.04第一章加载迅为提供 Ubuntu20.04
Ubuntu20.04取消root账号自动登录的方法,触觉智能RK3568开发板演示
Ubuntu20.04默认情况下为root账号自动登录,本文介绍如何取消root账号自动登录,改为通过输入账号密码登录,使用触觉智能EVB3568鸿蒙开发板演示

系统适配 | RK3588适配Ubuntu20.04发布预告
前言:为了满足广大开发者与嵌入式爱好者的需求!眺望电子正式宣布,已完成基于瑞芯微RK3588的开发板对Ubuntu20.04LTS操作系统的深度适配与优化。此次适配不仅成功移植了

系统适配 | RK3576适配Ubuntu20.04正式发布
前言:为了满足广大开发者与嵌入式爱好者的需求!眺望电子正式宣布,已完成基于瑞芯微RK3576的开发板对Ubuntu20.04LTS操作系统的深度适配与优化。此次适配不仅成功移植了





 工商网监
工商网监
评论