 ROS如何配置固定串口设备
ROS如何配置固定串口设备

配置固定串口设备
在linux中设备接到哪个串口号上是随机的,为解决这个问题,可以先将N100 设备的串口号设置成固定的名称,避免后期需要重复的修改配置
修改串口号
从网上下载 CP21xxCustomizationUtility 软件。
下面通过 CP21xxCustomizationUtility 这个 windows 上的软件修改并固定
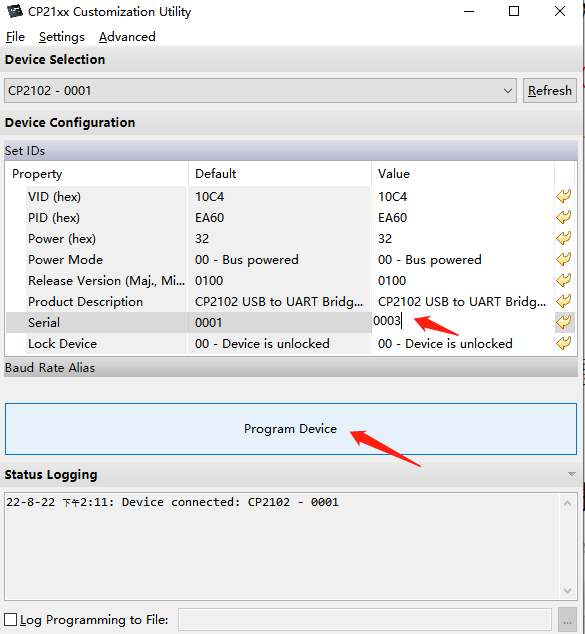
修改0003那个地方,然后点击 Program Device
设备创建别名
外设对应的串口名一般都是会变化的,为了避免手动选择,这里可以通过给 USB 设备创建别名的方式解决。
命名一个wheeltec_udev.sh 脚本文件
echo 'KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60",ATTRS{serial}=="0003", MODE:="0777", GROUP:="dialout", SYMLINK+="fdilink_ahrs"' >/etc/udev/rules.d/fdilink_ahrs.rules
service udev reload
sleep 2
service udev restart
其中 ATTRS{serial}==”0003” 就是刚从0001改为的0003,其它信息没有变,看上面的截图
sudo chmod 777 wheeltec_udev.sh
给这个脚本文件赋权
sudo sh wheeltec_udev.sh
执行脚本
测试
把 WHEELTEC N100 模块连接到 ROS 主控
在终端运行:ll /dev 查看设备

结果现实已经成功用 fdilink_ahrs 这个别名来代表惯导模块了,后续不管接 到哪个 USB 口,使用的时候均不需要考虑端口号变化问题。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Linux
+关注
关注
88文章
11535浏览量
214869 -
串口设备
+关注
关注
0文章
17浏览量
8747 -
ROS
+关注
关注
1文章
288浏览量
17867
发布评论请先 登录
相关推荐
热点推荐
基于串口的STM32通过rosserial和ROS系统通信的代码
前言最初参考网上资料移植了一份基于串口的STM32通过rosserial和ROS系统通信的代码。对于小数据量格式的消息,可以正常通信,但消息量一大便会出错(如:发布ROS提供的odom和imu格式的消息)。网上还有另一种建立单片
发表于 08-06 08:54
最实用的STM32和ROS机器人的串口通信方案
全网最实用的STM32和ROS机器人的串口通信方案小白学移动机器人同名公众号:小白学移动机器人创作声明:内容包含虚构创作内容中的情节存在虚构加工,仅供参考全网最实用的STM32和ROS机器人的
发表于 08-20 06:33
如何使用串口联系ROS和下位机
这次的记录来源于最近在把ROS和STM32联系在一起,更多是填坑吧。一、使用串口联系ROS和下位机主要参考: ROS中串口操作中间遇到了一个
发表于 11-23 06:33
如何在ROS上使用serial包进行串口通信
作者:良知犹存转载授权以及围观:欢迎添加微信公众号:羽林君前言主题:串口是一种设备间常用的通讯接口,rosserial将串口字符数据转发到标准ROS网络,并输出到rosout和其日志文
发表于 02-21 07:27
基于无线wifi网络的X3派和PC虚拟机通过ROS2实现跨设备通信
1、X3派和PC虚拟机都连接无线wifi网络的情况下通过ROS2实现跨设备通信多机通信是ROS的基础能力之一,相比于ROS1,ROS2通过非
发表于 07-13 15:13
ROS路由器安装和配置录像
ROS路由器安装和配置录像
MikroTik RouterOS 是路由操作系统,是基于x86 PC开发的路由软件,将普通PC变为高性能路由器,现在已移植到MikroTik RouterBOARD硬件平台运行。RouterOS开发
发表于 09-09 10:26
?69次下载
如何配置ROS驱动功能包
配置ROS驱动功能包 将WHEELTEC 100N的 ROS_SDK 保存在工作空间的src文件夹下。 通过 catkin_make 进行编译。 刚装的ros环境会报错,如下: Mak

串口通信的开发环境配置
串口通信的开发环境配置涉及多个方面,包括选择编程语言、安装必要的库或驱动程序、配置串口参数等。以下是一个基于Python的串口通信开发环境





 工商网监
工商网监
评论