 【新品发布】ZMC600E EtherCAT主站控制器全新上市
【新品发布】ZMC600E EtherCAT主站控制器全新上市



声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
致远电子
+关注
关注
13文章
414浏览量
32011
原文标题:【新品发布】ZMC600E EtherCAT主站控制器全新上市
文章出处:【微信号:ZLG_zhiyuan,微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
【一分钟教程】用ZMC600E实现关节机器人±180度精准转动
又是如何精准而实时的控制它们的“手脚”,从而完成各种高难度动作的?今天我们就用ZLG致远电子的ZMC600E做一个控制机器人运动的例程,实现一个关节机器人±180度

基于米尔安路飞龙派FPGA FPSoC+移植SOEM实现EtherCAT主站控制功能
on-chip RAM,内存接口和丰富的外设互联接口,定位复杂嵌入式系统、低功耗和高性能芯片市场。
DR190M芯片的PS端有两个以太网控制器,基于以太网的功能,可以实现EtherCAT主站
发表于 07-11 19:49
EtherCAT主站转Profinet网关接汇川伺服操作模式的控制解析
与设备间搭建了标准化桥梁。当需要将采用EtherCAT协议的从站设备(如伺服驱动器等)与Profinet主站设备(如西门子

先辑半导体HPM6E00系列产品能用来做EtherCAT的主站吗
虽然明确说明了先辑半导体HPM6E00系列产品能用来做EtherCAT的从站,但它可以用来做主站吗,还是说必须用其他芯片做主站呢
发表于 03-16 10:16
ZMC600E,多核异构如何成就机器人精准控制?
导读ZMC600E主站控制器凭借其多核异构处理器的强大性能,实现了高算力与高实时性的完美平衡,让机器人动作流畅、精准无误。接下来,让我们深入
三格电子-EtherCAT从站转ModbusTCP主站/从站网关
? ?EtherCAT从站转ModbusTCP主站/从站网关 ?型号:SG-ECAT_S-TCP ? ? ?本产品是 EtherCAT 和

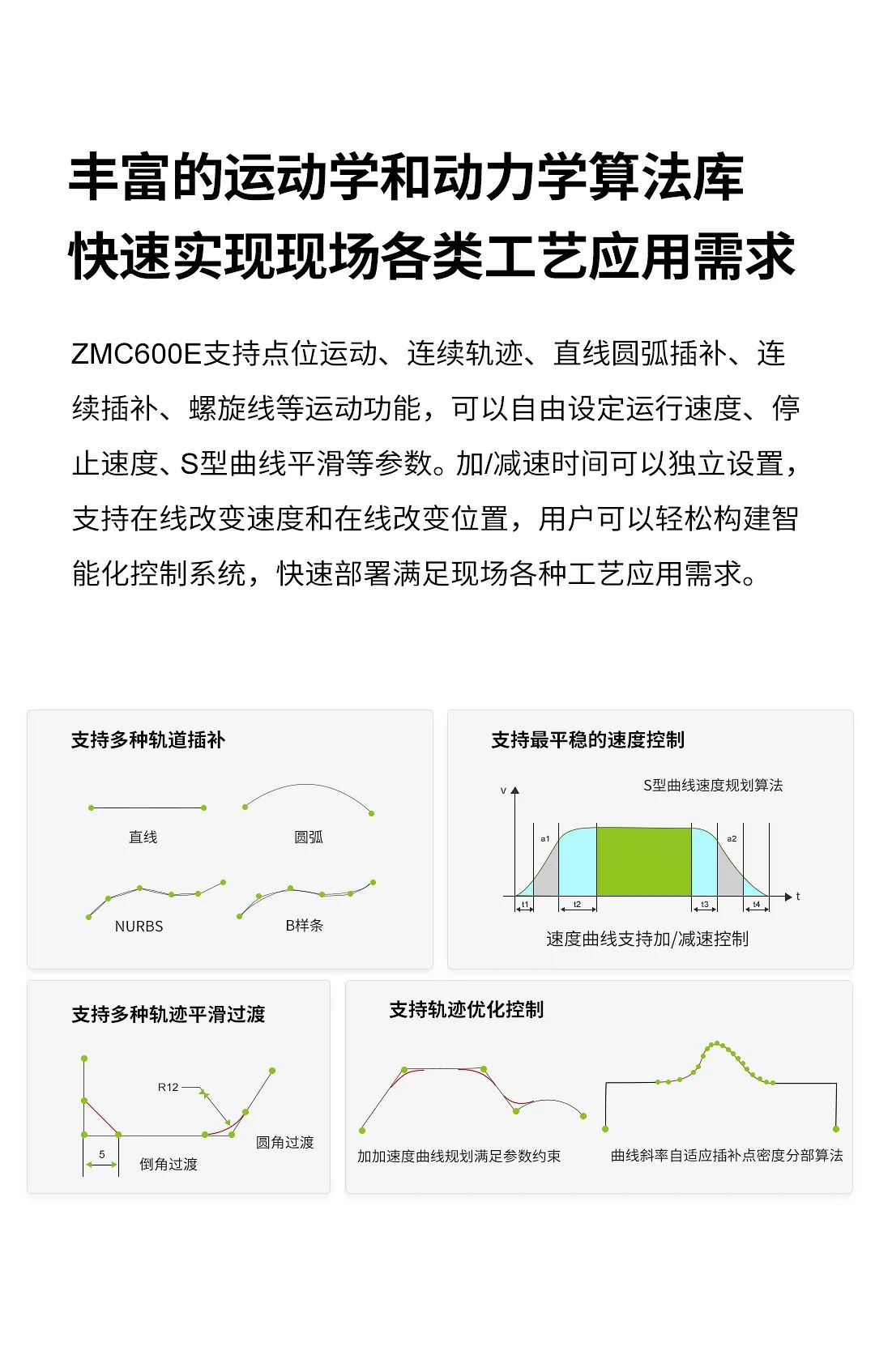
ZMC600E运动控制器直线和圆弧插补算法详解
导读想深入了解ZMC600E运动控制器的插补算法吗?空间直线插补适用于精确定位,圆弧插补提供平滑曲线过渡。合理应用这些算法,能提升多轴协同能力,保障工作精度与可靠性,让工业自动化更高效、更智能
ZMC600E运动控制器T型、S型速度规划详解
导读想深入了解ZMC600E运动控制器的速度规划吗?T型线性加减速简洁高效,S型过渡自然减震,避免冲击。通过合理的规划选择,可有效提升设备精度、效率与性能。深入探索其核心,为工业自动化设备的控制赋能
脉冲全闭环EtherCAT运动控制器的固件升级
固件是常用功能。推荐优先使用最新的RTSys软件。 本文以ZMC406R-V2运动控制器为例给大家介绍正运动固件升级的多种方式。 ZMC406R-V2 6轴总线型运动控制器

EtherCAT EOE移植及上手说明
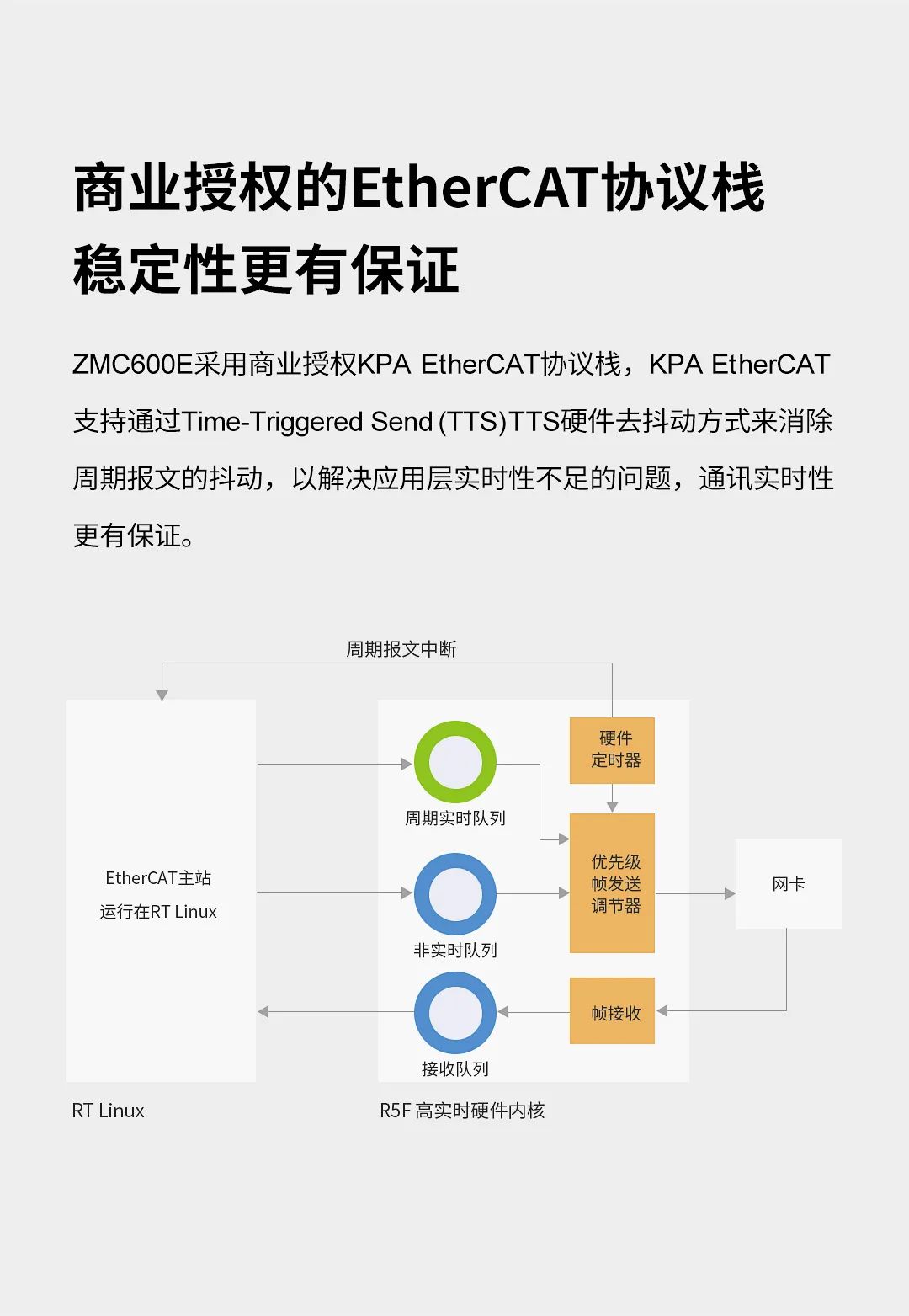
01EtherCAT介绍1EtherCAT状态机制ESM(EtherCATstatemachine)是用来在启动或者工作时协调主站和从站关系

使用C2000 EtherCAT从站控制器的SMI进行以太网PHY配置
电子发烧友网站提供《使用C2000 EtherCAT从站控制器的SMI进行以太网PHY配置.pdf》资料免费下载
发表于 09-07 10:37
?0次下载

EtherCAT主站转Modbus TCP从站协议网关(JM-ECTM-TCP)
一,设备主要功能 捷米特JM-ECTM-TCP网关实现Modbus TCP网络与EtherCAT网络的互连互通。该网关可实现双向数据交换,实现EtherCAT设备和Modbus TCP控制器的数据

EtherCAT从站转Profinet主站协议网关(JM-PNM-ECT)
一,产品主要功能 1、 捷米特JM-PNM-ECT 型网关实现Profinet控制器和EtherCAT从站设备之间的数据通信,连接到Profinet(RT和IRT)网络。支持EtherCAT

EtherCAT从站转CANopen主站协议网关(JM-ECT-COP)
的驱动器可能采用CANopen协议进行控制和反馈,而整个机器人的控制系统基于EtherCAT网络。EtherCAT从





 工商网监
工商网监
评论