 抓取机器人为什么都采用伺服电机?
抓取机器人为什么都采用伺服电机?

抓取机器人需要对物体进行高精度、高速度的抓取和放置,因此需要使用高性能的伺服电机来实现精准的运动控制。相比于其他类型的电机,伺服电机具有以下优点,适合应用于抓取机器人中:
1、伺服电机可以实现高精度的位置和速度控制,可以确保机械臂在抓取和放置物体时的精准度。
2、伺服电机具有快速响应的特点,可以实现高速度的运动控制,提高机械臂的抓取和放置效率。
3、伺服电机具有平稳的转矩输出特性,可以保证机械臂在运行过程中的平稳性和稳定性,避免因为惯性等原因导致的震动和损坏。
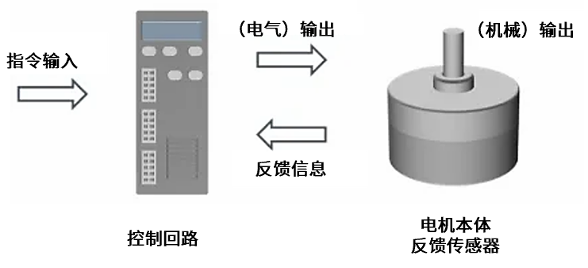
4、伺服电机通常配备编码器等位置反馈装置,可以实时监测机械臂的位置和状态,并通过反馈信号进行精确控制,提高机械臂的抓取和放置精度和稳定性。
5、伺服电机可以通过编程实现多种运动模式和控制策略,可以根据不同的抓取需求进行灵活的控制和调整。
为了满足大家对于抓取机器人用伺服的需要,我们开发了一体式的永磁同步交流伺服,欢迎加微信18309815706咨询。
晚上我们“广成工控”直播间也会聊相关内容,欢迎观看。

原文标题:抓取机器人为什么都采用伺服电机?
文章出处:【微信公众号:广成工控】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
广成科技
+关注
关注
0文章
268浏览量
663
原文标题:抓取机器人为什么都采用伺服电机?
文章出处:【微信号:gccanzx,微信公众号:广成工控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
轮式移动机器人电机驱动系统的研究与开发
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间模型进行了分析和计算,研究和设计了自主移动机器人
发表于 06-11 14:30
智能投递机器人为什么采用铝型材质?揭秘轻量化时代的效率革命
智能投递机器人为什么采用铝型材质?答案不仅是技术选择,更是对效率、灵活性与可持续未来的深度洞察。富唯智能以铝为翼,赋能机器人突破物理边界,让每一次投递都成为智能制造的创新注脚。
富唯智能最小复合机器人的强大抓取实力?
在工业自动化领域,复合机器人的身影愈发常见。但你是否好奇,最小的复合机器人能抓取多少多重?富唯智能以创新技术,给出了令人惊叹的答案,彻底颠覆我们对小身形机器人的认知。?

复合机器人抓取精度的影响因素及提升策略
复合机器人结合了移动机器人(如AGV)和机械臂的功能,广泛应用于物流、制造等领域。抓取精度是其核心性能指标之一,直接影响作业效率和产品质量。本文将探讨复合机器人
从机器人到半导体设备:哈默纳科HMA中空伺服交流电机如何解决工业驱动难题
在工业机器人精准抓取的瞬间,在晶圆搬运设备高速运转的毫秒间,传统伺服电机外置线缆的干涉风险、笨重的体积限制,是否已成为制约设备性能的"阿喀琉斯之踵"?哈默纳科HMA系列中空
国民技术N32H系列MCU在伺服与机器人领域的应用
近日,由Big-Bit商务网主办,《半导体器件应用》杂志承办的2025中国电机智造与创新应用暨电机产业链交流会(春季)于深圳召开。国民技术副总经理钟新利受邀在伺服电机智能控制与
其利天下技术·伺服电机在机器人技术中的应用
伺服电机作为机器人运动控制的核心部件,其高精度、高响应速度和高负载能力等特点,为机器人的精确运动提供了有力保障。在工业机器人、医疗

探讨 GaN FET 在人形机器人中的应用优势
:探讨在人形机器人中的应用优势.pdf 人形机器人系统挑战 :人形机器人集成多个子系统,其中伺服控制系统空间受限。为实现类似人类的运动范围,需部署约 40 部
伺服电动缸在人形机器人中的应用
伺服电动缸在人形机器人中的应用非常广泛,主要体现在以下几个方面:一、核心运动部件伺服电动缸是将伺服电机与丝杠一体化设计的模块化产品,能将
发表于 02-06 09:04
伺服系统在机器人中的作用 伺服系统与传统电机对比
位置、速度和加速度的系统,它通过接收控制信号来驱动电机,实现对机器人关节的精确控制。 精确控制:伺服系统能够提供精确的速度和位置控制,这对于执行复杂任务的机器人来说至关重要。例如,在装
伺服电机在机器人中的应用有哪些
伺服电机作为现代工业自动化领域的核心组件,其精确控制和高效性能在机器人技术中扮演着至关重要的角色。 伺服电机的工作原理
伺服驱动器在机器人中的应用案例
在现代工业自动化和智能制造领域,机器人技术的发展日新月异,而伺服驱动器作为机器人系统中的关键组件之一,扮演着至关重要的角色。 1. 伺服驱动器的基本原理
什么是伺服电机?伺服电机的工作原理是什么?
伺服电机是一种高精度的电机,广泛应用于自动化控制、机器人、精密机械等领域。它能够根据输入的控制信号,精确地控制电机的转速、位置和力矩,实现对





 工商网监
工商网监
评论