 ΜζΤς”ψ–ΊςΔ…œœ¬ΑΎΕ·ΙΠΡήΒΡ Βœ÷
ΜζΤς”ψ–ΊςΔ…œœ¬ΑΎΕ·ΙΠΡήΒΡ Βœ÷

1. ‘ΥΕ·ΙΠΡήΥΒΟς
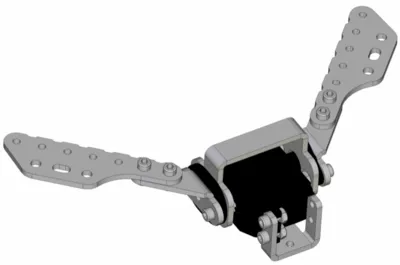
±ΨΈΡ ΨάΐΫΪ Βœ÷R330―υΜζΜζΤς”ψ–ΊςΔΡήΙΜΝιΜνΒΡ…œœ¬ΑΎΕ·ΒΡΙΠΡήΓΘ

2. ΫαΙΙΥΒΟς
±Ψ―υΜζ≤…”ΟΕφΜζΡΘΩιά¥Ϋχ––Ζ¬…ζΜζΤς”ψΫαΙΙΒΡ…ηΦΤΓΘ
 –ΊςΔ
–ΊςΔ 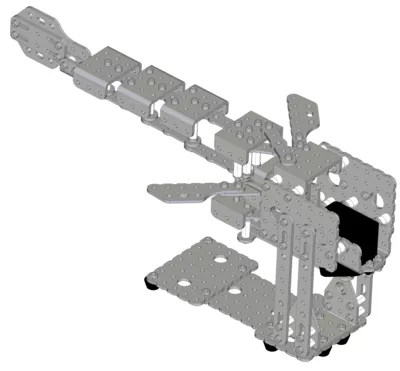 ’ϊΜζ
’ϊΜζ
3. ΒγΉ””≤Φΰ
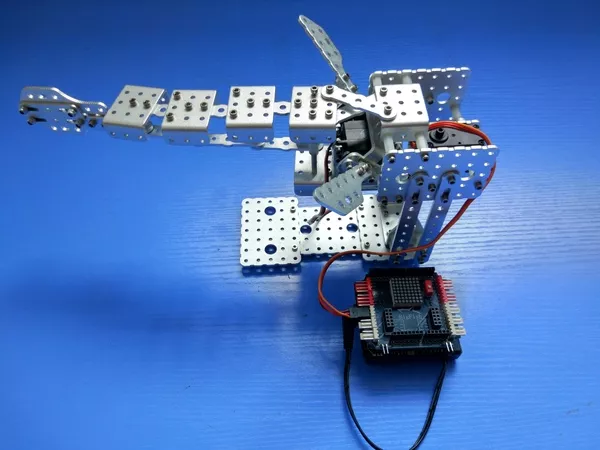
‘Ύ’βΗω Ψάΐ÷–Θ§Έ“Ο«≤…”ΟΝΥ“‘œ¬”≤ΦΰΘ§«κ¥σΦ“≤ΈΩΦΘΚ
| ÷ςΩΊΑε | Basra÷ςΩΊΑεΘ®Φφ»ίArduino UnoΘ©? |
| ά©’ΙΑε | Bigfish2.1ά©’ΙΑε? |
| Βγ≥Ί | 7.4Vο°Βγ≥Ί |
Βγ¬ΖΝ§Ϋ”ΘΚΫΪΕφΜζΝ§Ϋ”‘ΎBigfishά©’ΙΑεΒΡD4ΕΥΩΎΓΘ
4. ‘ΥΕ·ΙΠΡή Βœ÷
±ύ≥ΧΜΖΨ≥ΘΚArduino 1.8.19
œ¬ΟφΧαΙ©“ΜΗωΜζΤς”ψ–ΊςΔ…œœ¬ΑΎΕ·ΒΡ≤ΈΩΦάΐ≥ΧΘ®fishQi.inoΘ©Θ§άΐ≥Χ‘¥¥ζ¬κœξΦϊΘ®https://www.robotway.com/h-col-236.htmlΘ©Θ§ Β―ι–ßΙϊΩ…≤ΈΩΦΆχ’Ψ―ί Ψ ”ΤΒΓΘ
/*------------------------------------------------------------------------------------ Αφ»®ΥΒΟςΘΚCopyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by ΜζΤςΤΉ 2023-05-23 https://www.robotway.com/ ------------------------------*/ #include int _ABVAR_1_angle_current2 = 0 ; int _ABVAR_2_num = 0 ; Servo servo_pin_4; int _ABVAR_3_angle_current1 = 0 ; void up_down(); void down_up(); void setup() { servo_pin_4.attach(4); } void loop() { down_up(); up_down(); } void down_up() { _ABVAR_1_angle_current2 = 30 ; for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 16 ); _ABVAR_2_num++ ) { _ABVAR_1_angle_current2 = ( _ABVAR_1_angle_current2 + 5 ) ; servo_pin_4.write( _ABVAR_1_angle_current2 ); delay( 50 ); } } void up_down() { _ABVAR_3_angle_current1 = 110 ; for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 16 ); _ABVAR_2_num++ ) { _ABVAR_3_angle_current1 = ( _ABVAR_3_angle_current1 - 5 ) ; servo_pin_4.write( _ABVAR_3_angle_current1 ); delay( 50 ); } }
œ¬Οφ‘ΌΗχ¥σΦ“ΧαΙ©“ΜΗωΜζΤς”ψ”ψΈ≤ΑΎΕ·ΒΡ≤ΈΩΦάΐ≥ΧΘ®fishTail.inoΘ©Θ§¥σΦ“Ω…“‘≥Δ ‘ΗΡ–¥“Μœ¬ΕφΜζΑΎΕ·Ϋ«Ε»≤Έ ΐΘ§»ΟΜζΤς”ψΈ≤ΡήΙΜΝιΜνΒΡΑΎΕ·ΓΘ
/*------------------------------------------------------------------------------------
Αφ»®ΥΒΟςΘΚCopyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by ΜζΤςΤΉ 2023-05-23 https://www.robotway.com/
------------------------------*/
#include
int _ABVAR_1_angle_right = 0 ;
int _ABVAR_2_num = 0 ;
Servo servo_pin_4;
int _ABVAR_3_angle_left = 0 ;
void Right_Left();
void left_Right();
void setup()
{
servo_pin_4.attach(4);
}
void loop()
{
left_Right();
Right_Left();
}
void Right_Left()
{
_ABVAR_1_angle_right = 70 ;
for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 8 ); _ABVAR_2_num++ )
{
_ABVAR_1_angle_right = ( _ABVAR_1_angle_right + 5 ) ;
servo_pin_4.write( _ABVAR_1_angle_right );
delay( 100 );
}
}
void left_Right()
{
_ABVAR_3_angle_left = 110 ;
for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 8 ); _ABVAR_2_num++ )
{
_ABVAR_3_angle_left = ( _ABVAR_3_angle_left - 5 ) ;
servo_pin_4.write( _ABVAR_3_angle_left );
delay( 100 );
}
}
…σΚΥ±ύΦ≠ΜΤ”ν
…υΟςΘΚ±ΨΈΡΡΎ»ίΦΑ≈δΆΦ”…»κΉΛΉς’ΏΉΪ–¥Μρ’Ώ»κΉΛΚœΉςΆχ’Ψ Ύ»®ΉΣ‘ΊΓΘΈΡ’¬ΙέΒψΫω¥ζ±μΉς’Ώ±Ψ»ΥΘ§≤Μ¥ζ±μΒγΉ”ΖΔ…’”―ΆχΝΔ≥ΓΓΘΈΡ’¬ΦΑΤδ≈δΆΦΫωΙ©ΙΛ≥Χ Π―ßœΑ÷°”ΟΘ§»γ”–ΡΎ»ί«÷»®Μρ’ΏΤδΥϊΈΞΙφΈ ΧβΘ§«κΝΣœΒ±Ψ’Ψ¥ΠάμΓΘ
ΨΌ±®ΆΕΥΏ
-
ΜζΤς”ψ
+ΙΊΉΔ
ΙΊΉΔ
0ΈΡ’¬
11δ·άάΝΩ
3225
ΖΔ≤ΦΤά¬έ«κœ» Β«¬Φ
œύΙΊΆΤΦω
»»ΒψΆΤΦω
3CΒγΉ”––“Β|Η¥ΚœΜζΤς»ΥΈοΝœΉΣ‘ΥΦΑ…œœ¬ΝœΫβΨωΖΫΑΗ
Ψ≠ ά÷«ΡήΗ¥ΚœΜζΤς»Υ‘Ύ3CΒγΉ”––“ΒΨέΫΙΈοΝœΉΣ‘Υ”κ≤÷¥ΔΙήάμΓΔΨΪΟή…η±Η…œœ¬ΝœΓΔΉΑ≈δ’ΨΜζΧ®…œœ¬ΝœΒ»”Π”Ο≥ΓΨΑΓΘ

ΑκΒΦΧε––“Β|Η¥ΚœΜζΤς»ΥΨß‘≤Κ–ΉΣ‘ΥΦΑ…œœ¬ΝœΫβΨωΖΫΑΗ
Ψ≠ ά÷«ΡήΑκΒΦΧε––“ΒΨß‘≤Κ–ΉΣ‘ΥΗ¥ΚœΜζΤς»ΥΘ§Η¥ΚœΜζΤς»Υ‘ΎΑκΒΦΧε––“Β÷ς“Σ”Π”Ο”ΎΨß‘≤Κ–ΉΣ‘ΥΓΔΜζΧ®…œœ¬ΝœΒ»ΜΖΫΎΘ§Ά®ΙΐΓΑAGV“ΤΕ·ΒΉ≈Χ+–≠ΉςΜζ–Β±έ+ ”ΨθœΒΆ≥"“ΜΧεΜ·ΩΊ÷ΤΖΫΑΗ Βœ÷ΗΏ–ßΉ‘Ε·Μ·

CNC––“Β|Η¥ΚœΜζΤς»ΥCNC…œœ¬ΝœΦΑΉ‘Ε·ΜΜΒΕΫβΨωΖΫΑΗ
Ψ≠ ά÷«ΡήCNC…œœ¬ΝœΗ¥ΚœΜζΤς»ΥΘ§Η¥ΚœΜζΤς»ΥΦ·≥…AGV+Μζ–Β±έ+ ”ΨθœΒΆ≥Θ§ΧαΙ©CNCΕύΙΛ–ρ»α–‘…œœ¬ΝœΓΔCNC»ΪΉ‘Ε·ΒΕΨΏΗϋΜΜΉ‘Ε·Μ·ΫβΨωΖΫΑΗΘ§¥ρΆ®…ζ≤ζΈοΝςΉνΚσΓΑ“ΜΙΪάο"ΓΘ

ΗΜΈ®÷«ΡήΗ¥ΚœΜζΤς»Υ“ΫΝΤΝœœδ…œœ¬ΝœΑα‘ΥΑΗάΐ
Ά®Ιΐ Β ©ΗΜΈ®÷«ΡήΗ¥ΚœΜζΤς»Υ“ΫΝΤΝœœδ…œœ¬ΝœΑα‘ΥΖΫΑΗΘ§ΗΟ“ΫΝΤΤσ“Β≥…ΙΠ Βœ÷ΝΥΈοΝœΑα‘ΥΜΖΫΎΒΡΉ‘Ε·Μ·”κ÷«ΡήΜ·…ΐΦΕΘ§œ‘÷χΧα…ΐΝΥ‘Υ”Σ–ß“φΘ§ΈΣ“ΫΝΤ––“ΒΒΡ÷«ΡήΜ·ΉΣ–Ά ςΝΔΝΥ–¬ΒΡ±ξΗΥΓΘ
ΜζΤς ”Ψθ‘ΥΕ·ΩΊ÷Τ“ΜΧεΜζ‘ΎSCARAΜζΤς»Υ»α’ώ≈Χ…œœ¬ΝœΒΡ”Π”Ο
’ΐ‘ΥΕ·SCARAΜζΤς»Υ»α’ώ≈Χ…œœ¬ΝœΫβΨωΖΫΑΗ

HarmonyOS Β’ΫΘΚΩλΥΌ Βœ÷“ΜΗω…œœ¬ΙωΕ·ΒΡΙψΗφΩΊΦΰ
…œ“Σœκ Βœ÷’β―υΒΡΙΠΡή≤Δ≤Μ»ί“ΉΘ§Ρ«Ο¥‘ΎΚηΟ……œ‘θΟ¥ Βœ÷’β―υΒΡΙΠΡήΡΊΘΩ±ΨΤΣΈΡ’¬ΫΧΡψ Ι”ΟΉνΦρΒΞΒΡΖΫ Ϋ Βœ÷“ΜΗω÷ß≥÷
PLC‘Ε≥Χ…œœ¬‘ΊΆχΙΊΨΏ±ΗΡΡ–©ΙΠΡή
PLC‘Ε≥Χ…œœ¬‘ΊΆχΙΊΨΏ±Η“‘œ¬ΙΠΡήΘΚ ‘Ε≥ΧΖΟΈ ΘΚ‘ –μ”ΟΜßΆ®ΙΐΆχ¬γ‘Ε≥ΧΒ«¬ΦΒΫPLCΘ§Ϋχ––≥Χ–ρΒΡ…œ¥ΪΚΆœ¬‘Ί≤ΌΉςΓΘ’β“ΜΙΠΡή¥ρΤΤΝΥΒΊ”ρœό÷ΤΘ§ ΙΙΛ≥Χ ΠΚΆΙήάμ’ΏΩ…“‘‘Ύ‘ΕάκΙΛ“Βœ÷≥ΓΒΡΒΊΖΫΕ‘PLCΫχ–– Β ±ΒΡΈ§ΜΛΚΆΗϋ–¬
…ζ≤ζΧα÷ –¬άϊΤςΘΓΒΞ÷α≤βΨΕ“«Η≥Ρή”ψΗΆΓΔ”ψœΏΗΏΨΪΦλ≤β
Θ§Ή‘Ε·–ό’ΐœΏΨΕΤΪ≤νΓΘΦθ–ΓœΏΨΕ≤®Ε·Θ§Φθ…ΌΖœΤΖ¬ ΓΘ
Β ±±®Ψ·”κ ΐΨίΙήάμ
…η±Η≈δ±Η…υΙβ±®Ψ·ΙΠΡήΘ§Β±Φλ≤βΒΫ≥§≤νΘ®»γ”ψœΏ÷±ΨΕΤΪάκ±ξ≥Τ÷ΒΘ© ±ΝΔΦ¥Ψ· ΨΘ§≤ΔΩ…Ά®ΙΐRS485ΜρΡΘΡβΝΩΫ”ΩΎΫΪ ΐΨί¥Ϊ δ÷ΝPLCΜρ…œΈΜΜζΘ§ Βœ÷
ΖΔ±μ”Ύ 03-31 14:15
ΗΜΈ®÷«Ρή…œœ¬ΝœΜζΤς»ΥΘΚΉ‘Ε·Μ·…ζ≤ζΒΡΒΟΝΠ÷ζ ÷
ΗΜΈ®÷«ΡήΒΡ…œœ¬ΝœΜζΤς»ΥΤΨΫηΤδΨΪΉΦΗΏ–ßΒΡ≤ΌΉςΓΔΕύΙΠΡή”Π”ΟΒΡΧΊΒψΓΔ÷«ΡήΒςΕ»ΒΡ”≈ ΤΓΔΑ≤»ΪΈ»Ε®ΒΡ–‘Ρή“‘ΦΑΉ®“ΒΒΡΖΰΈώ÷ß≥÷Θ§≥…ΈΣΝΥ÷ΎΕύΤσ“ΒΉ‘Ε·Μ·…ζ≤ζœΏΒΡΒΟΝΠ÷ζ ÷ΓΘ»γΙϊΡζ’ΐ‘Ύ―Α’““ΜΩνΡήΙΜΧα…ΐ…ζ≤ζ–߬ ΓΔΫΒΒΆ≥…±ΨΓΔ”≈Μ·…ζ≤ζΝς≥ΧΒΡ

ΜζΤς»Υ»γΚΈ Βœ÷“ΤΕ·ΙΠΡή
‘Ύ«ΑΟφΝΫΤΣΓΕ»γΚΈ÷Τ‘λΉψ«ρΜζΤς»ΥΓΖΈΡ’¬÷–Θ§Έ“Ο«÷ς“ΣΈß»ΤΜζΤς»Υ±ΨΧεΫχ––ΝΥ”≤Φΰ…ηΦΤΘ§Εχ’β¥ΈΫΪ“‘ΩΊ÷ΤΤςΈΣ÷––ΡΘ§ΩΣ’Ι»μΦΰ…ηΦΤΙΛΉςΓΘ‘Ύ’ΐ ΫΩΣ Φ÷°«ΑΘ§œ»ΈΣ¥σΦ“ΜΊΙΥ“Μœ¬ΜζΤς»Υ»γΚΈ Βœ÷“ΤΕ·
ΦΛΙβΚΗΫ”÷–’ώΨΒΒΡΑΎΕ·‘≠άμ
’ώΨΒΦΛΙβΈΐΚΗ «Ζ«≥ΘΗΏ–ßΒΡ“Μ÷÷ΚΗΫ”ΖΫ ΫΘ§Ά®Ιΐ’ώΨΒΒΡΑΎΕ·ά¥Ε‘ΚΗΫ”ΒΡ«χ”ρΫχ––…®ΟηΓΔΥ… ΔΙβΒγά¥Ζ÷œμΦΛΙβΚΗΫ”÷–’ώΨΒΒΡΑΎΕ·‘≠άμΘ§ά¥ΝΥΫβ“Μœ¬Α…ΓΘ

–¬ΦΦ θΫβΨωΖΫΑΗ Η¥ΚœΜζΤς»Υ CNC Ή‘Ε·…œœ¬Νœ
‘ΎΉΖ«σΗΏ–ßΓΔΨΪΉΦ”κΉ‘Ε·Μ·ΒΡœ÷¥ζ÷Τ‘λ“Β÷–Θ§CNCΦ”ΙΛΦΦ θΒΡ”Π”Ο»’“φΙψΖΚΓΘ»ΜΕχΘ§CNCΜζ¥≤ΒΡ…œœ¬ΝœΙΐ≥ΧΆυΆυ≥…ΈΣ÷Τ‘Φ…ζ≤ζ–߬ ΒΡΤΩΨ±ΓΘΈΣΝΥΆΜΤΤ’β“Μœό÷ΤΘ§ΗΜΈ®÷«ΡήΆΤ≥ωΝΥΗ¥ΚœΜζΤς»ΥCNCΉ‘Ε·…œœ¬ΝœΫβΨωΖΫΑΗΘ§÷ΊΥή…ζ≤ζΝς≥ΧΘ§Χα…ΐ…ζ≤ζ–߬ ”κΝιΜν–‘
Η¥ΚœΜζΤς»ΥΘΚCNC ––“Β…œœ¬ΝœΒΡΗΏ–ß±δΗο’Ώ
‘ΎΨΚ’υΦΛΝ“ΒΡ CNC Φ”ΙΛΝλ”ρΘ§ΧαΗΏ…ζ≤ζ–߬ ΓΔΫΒΒΆ≥…±Ψ≤Δ»Ζ±ΘΦ”ΙΛΨΪΕ» «Τσ“Β≥÷–χΖΔ’ΙΒΡΙΊΦϋΓΘΗΜΈ®÷«ΡήΗ¥ΚœΜζΤς»ΥΒΡ≥ωœ÷Θ§ΈΣ CNC ––“ΒΒΡ…œœ¬ΝœΜΖΫΎ¥χά¥ΝΥ¥¥–¬–‘ΒΡΫβΨωΖΫΑΗΘ§≥…ΈΣ÷ΎΕύΤσ“Β Βœ÷÷«ΡήΜ·…ΐΦΕΒΡΚΥ–Ρ«ΐΕ·ΝΠΓΘ

PLC‘Ε≥Χ…œœ¬‘ΊΆχΙΊΒΡΙΠΡήΧΊΒψ
…œœ¬‘ΊΆχΙΊΉςΈΣ“Μ÷÷ΙΊΦϋ…η±ΗΘ§Τδ÷Ί“Σ–‘»’“φΆΙœ‘ΓΘ±ΨΈΡΫΪœξœΗΧΫΧ÷PLC‘Ε≥Χ…œœ¬‘ΊΆχΙΊΒΡΙΠΡήΧΊΒψΓΘ 1. ‘Ε≥ΧΖΟΈ ”κ≥Χ–ρ…œœ¬‘Ί PLC‘Ε≥Χ…œœ¬‘ΊΆχ






 ΙΛ…ΧΆχΦύ
ΙΛ…ΧΆχΦύ
Τά¬έ