 基于微型铁磁机器人的微流控平台,实现灵活高效的病毒检测
基于微型铁磁机器人的微流控平台,实现灵活高效的病毒检测

最近,在香港大学机械工程系科研助理教授林海松担任第一作者的Nature论文中,他和合作者利用名为Ferrobot的微型铁磁机器人,实现了自动化的快速群组病毒检测,可使检测试剂成本下降10至300倍。
在这一技术中,10个Ferrobot微型机器人高效协作,它们携带着输入的鼻咽拭子样品,在手掌大小的平台上进行自动化运输、分离、分类、混合等操作,通过集成核酸扩增检测试剂,来对新冠病毒的遗传物质进行群组筛查,从而对病毒感染情况进行诊断。
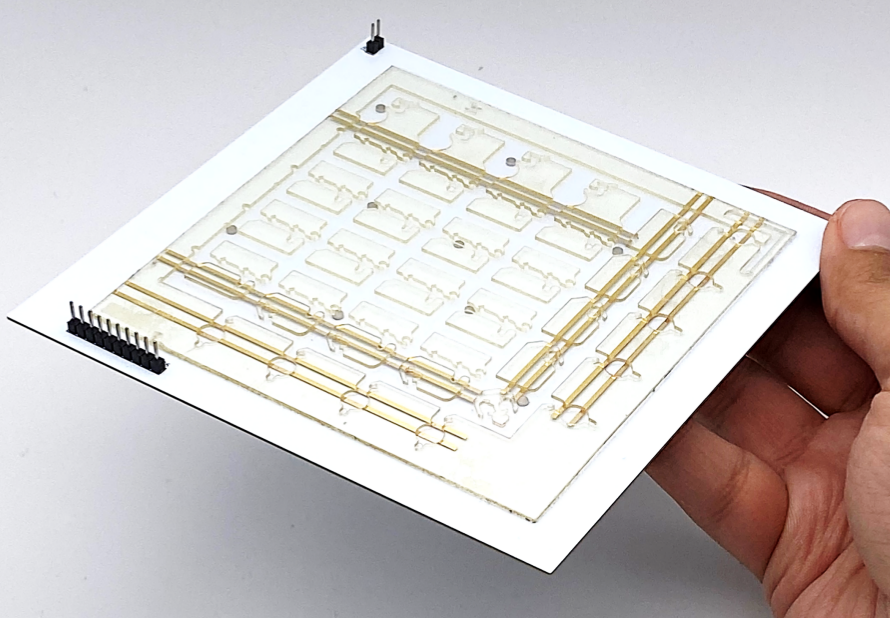
图 | 只有手掌大小的Ferrobot检测平台(来源:Nature)
其与实验室检测的聚合酶链式反应测试法(即大家熟悉的核酸检测),所得到的结果一致。同时,Ferrobot平台的制造成本既廉价、又简单,可以实现大规模生产和部署。整个系统的运行可靠性,远超诸多同类型的流体操纵技术,并在800多万次自动化测试中得到了证明。
同时,它的另一突破在于:利用基于患病率的适应性检测算法——平方矩阵方案,进行群组筛查。在同时测试16个样品的前提下,相比单独测试的方法,该技术的微量化测试与群组筛查设计的特点,能让化学试剂的消耗量降低300倍。
如果群组测试结果为阳性,后续的筛查测试将继续由该平台自动进行,直到识别出具体的阳性样本。测试全程只需30到60分钟,具体时长取决于是否有阳性样本。
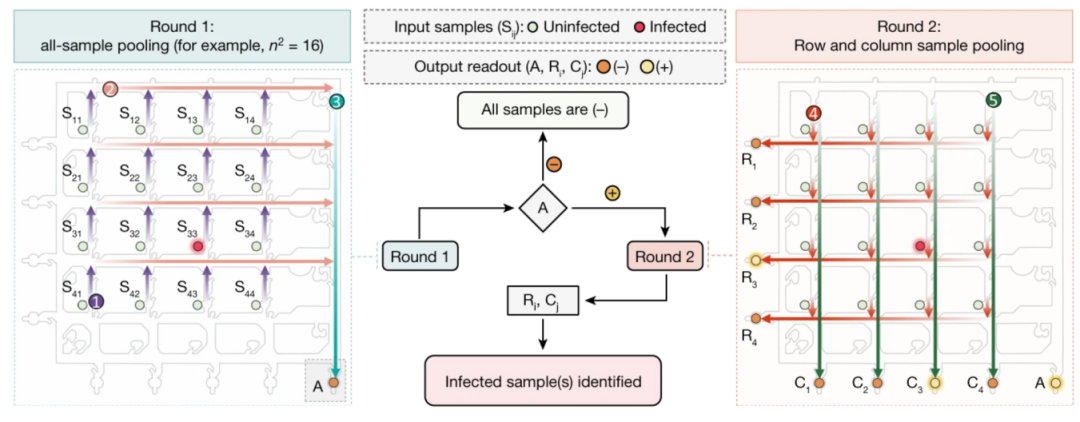
图 | 基于患病率的适应性平方矩阵检测算法及硬件执行方案,可对16个样本进行多轮全自动群组筛查(来源:Nature)
此外,只有手掌大小的便携式平台利用可编程的自动化操纵,可以避免繁琐的人工操作,从而缩短测试周期。在自动化分析中,无需过多的专业测试人员,就能在大规模测试点和社区实现自主检测。
举例来说,几十个检测组件就有望实现对一所大学进行快速病毒检测。同时,这款手持式一体化实验平台,可以让病毒检测脱离实验室的局限性,从而实现检测的社区化普及,进而最大限度地利用资源,降低物资和人力的使用量,借此减少测试成本,同时还能有效遏制疫情蔓延。
也就是说,Ferrobot平台能对新冠病毒进行快速、廉价的自动化检测,而且无需繁琐的样品处理和复杂的人员培训。在芯片中,样本会被进行自动化处理分析,从而减少对于实验室规模集中检测的依赖,可以轻易地在办公楼、学校、机场甚至公共交通上部署病毒测试。
而这种无需实验室分析的方法,在便携快速的同时还能保障检测的精准度。此外,基于微流控的测试对试剂的消耗较少,可以极大地降低测试所需成本。
(来源:Nature)
事实上,在每一种新型病毒爆发的初期,对病毒的追踪速度直接关系到疫情的传播速度,测试方法的较长研发周期,也会直接导致疫情的快速蔓延。
而Ferrobot平台能对新病毒的特定核酸信息进行“身份识别”,从而实现快速部署,借此建立准确的病毒检测方法,进而及时控制传播链。
此外,对于人体生物液中的多种生物标记,其也具备实时分析的潜力。除能对病毒性疾病进行检测追踪,还可以集成多种类型的生物试剂和传感器,帮助人们更好地进行健康管理,以及协助医生检查患者的健康状态。
另据悉,研究团队也打算探索该系统在化学、材料领域的应用。由于Ferrobot微流控芯片系统具备高度集成的特质,可以实现多种快速液体操纵,因此课题组希望借此解放实验室中人员的双手,通过编程合适的反应流程,利用微流控系统对反应过程实现准确、安全的控制,并结合算法来快速探索未知的反应。
当然,该平台的应用场景,绝不限于新冠病毒这一种病毒。过去几十年间,包括新冠病毒在内的多种流行病毒,频繁且规律性的出现威胁着人类的健康。在控制病毒大面积爆发的过程中,及时的病毒检测至关重要。然而,现有的检测模式高度依赖实验室设备,需要将待测样本从各个检测点收集、统计、运输到特定实验室进行分析,这会消耗大量的人力财力,并且耗时也比较长。因此,我们亟需一款便携、廉价的检测设备。
据介绍,Ferrobot检测平台的研发,贯穿林海松的整个博士生涯。在此次论文发表之前,他和当时所在的团队,已经积累了相对充足的经验,并将阶段性的技术整理为论文,以封面形式发表于Science Robotics。
此后,研究人员一直在寻找和发掘更多的应用场景,以将该技术最大化地用于日常生活。2020年,关于此次Nature论文的课题正式立项。
但在当时,他们还迷茫于无法明确此类技术的最优应用价值。随后新冠疫情爆发,各领域专家纷纷加入抗疫队伍。作为相关领域的科研人员,该团队当然也不例外。
而对于已经初步研发完毕的Ferrobot平台,课题组深谙其在生化检测上的优势,并立即意识到它将给病毒检测带来实际帮助。伴随着疫情全球化的紧迫之感,他们开启了为期两年的研究。
期间,一个具有革新意义的创意,让该研究迎来了真正的关键节点。正如前面说到,研究团队的最初目标在于实现病毒个体样本的检测自动化。不过,这一目标在2021年初已被攻克。所以,他们并不满足于当时的自动化检测效率,总觉得Ferrobot的自动化程度并没有完全发挥出来。
这时他们注意到,中国已经开始使用核酸混检方式。在人工混检的背后,人力、物力的消耗不容小觑。一旦发现阳性,就要追溯同一混检试管中的所有被检人员,进行一一重新排查。
这让研究人员意识到,病毒检测需要根据当地病毒传播程度,来设计最优的混检筛查方法,而且最好是高自动化的。而高适应性的Ferrobot平台,是最有希望对该瓶颈进行突破的手段之一。
接下来的一年多里,核心成员们进行着循环讨论、实验和分析,这种一周7天、早7晚11的工作模式,大大加速了实验进程,让微流控芯片的设计及优化、电路程序优化、生物化学试剂兼容性等核心问题得以解决。
(来源:Nature)
而作为一款病毒检测平台,自然要对真实样本进行大规模实验。课题组与加州大学洛杉矶分校(UCLA,University of California, Los Angeles)医学院、以及其他实验室进行协调和求助,借此获得大量的真实病毒样本,最终对Ferrobot平台进行了临床验证。
结果显示,对比日常的核酸检测结果,其灵敏度和准确性基本没有差别。但是,Ferrobot平台自动化微流体平台的特点,能让人力和物力的成本下降2-3个数量级。
研究期间,在第一次对病毒个体样本实现自动化检测时,担任此次论文共同一作的余文卓,小心翼翼地从通风橱里把芯片拿出来,当大家看到检测结果和预期结果一致时,那是科研人员最美好的瞬间。
后来,当看到准确率非常接近现有标准方法时,整个团队更加兴奋,因为这意味着Ferrobot平台兼具全自动化和准确性高的优势。
科研有时就像“升级打怪”,总有更难的沟壑要越过。在个体检测成功之后,课题组陷入了持续几周的迷茫期——苦恼于如何对病毒检测效率进行突破性提升。
为此,课题组向多个科研团队“取经”,以了解关于病毒检测的更多需求。在一次晚饭闲聊时,有人偶然提到了前文的混检模式。
于是,林海松和余文卓开启了一场激烈讨论:如何利用Ferrobot平台来优化群组检测效率。最终他们意识到:人工混检中的很多问题,都有望通过该平台达到更高的效率。
为此,他们决定采用基于患病率的适应性群组筛查算法:平方矩阵方案。林海松说:“记得那晚每个人都非常激动,对于项目的最终目标‘摩拳擦掌’。哪怕现在想到当时的情境,都会热血沸腾。”
而在实现对于群组筛查实验的全自动化之后,当第一次在实验室看到测试结果真实地呈现在大家眼前时。“那一刻我们一片欢腾,也为所有组员全身心投入的这段艰辛攻坚时期,画上了圆满的句号。”林海松表示。
最终,相关论文以“Ferrobotic swarms enable accessible and adaptable automated viral testing”为题发表在Nature上。
林海松为第一作者和共同一作,UCLA电子与计算机工程系博士研究生余文卓、基亚拉什·萨贝特(Kiarash Sabet)是共同一作。通讯作者为UCLA电子与计算机工程系副教授萨姆·埃马米内贾德(Sam Emaminejad)和生物工程系教授迪诺·迪·卡洛(Dino Di Carlo)。
图 | 相关论文(来源:Nature)
如今,林海松已经离开美国,也离开了当时的团队,目前任职于香港大学,但基于Ferrobot平台的跨国合作仍会继续。
在科研层面,他们仍在基于Ferrobot平台寻找一些关键的生物化学标记物,希望能对更多类型的人体健康状况进行评估,甚至对潜在疾病进行预测。
在成果转化层面,在由香港大学机械工程系教授岑浩璋领导的先进生物医学研究中心(Advanced Biomedical Instrumentation Center),林海松作为相关项目负责人正尝试把自动化生物标记的检测技术,推向更多外部实验室、医院、以及检测机构。
当然,也在尝试推向寻常百姓家,希望能让人们通过几滴唾液或汗液,就可以在电脑旁获取自己的健康信息。
论文链接:
https://doi.org/10.1038/s41586-022-05408-3
审核编辑 :李倩
-
微型机器人
+关注
关注
0文章
111浏览量
19926 -
微流控
+关注
关注
16文章
583浏览量
20114
原文标题:基于微型铁磁机器人的微流控平台,实现灵活高效的病毒检测
文章出处:【微信号:Micro-Fluidics,微信公众号:微流控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
智能检测机器人:多场景覆盖的高效检测模式

工业机器人的特点
纳芯微磁传感器技术推动人形机器人性能提升

【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
工业机器人工作站的建设意义
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
基于微型5G网关的石化厂区巡检机器人应用

【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
机器人加装电主轴【铣削、钻孔、打磨、去毛刺】更高效
FOC电机在机器人技术中的作用
基于磁珠操控的微流控平台实现副溶血性弧菌的快速捕获与检测

基于漩涡湍流辅助的微流控平台,可实现类精子结构的微型机器人一步成型






 工商网监
工商网监
评论