 利用支持微流控的柔性机器人技术开发的新型假肢
利用支持微流控的柔性机器人技术开发的新型假肢

全球每30秒就有人因糖尿病而被截肢整条腿。这些患者通常患有神经病变,下肢丧失知觉,无法觉察到由不合适的假体造成的损伤,最终惨遭截肢。
据麦姆斯咨询报道,加拿大科学家利用支持微流控的柔性机器人技术开发的新型假肢,有望大大减少脚踝到膝关节间截肢患者的皮肤溃疡和疼痛。该项研究以“Air microfluidics-enabled soft robotic transtibial prosthesis socket liner towards dynamic management of residual limb contact pressure and volume fluctuation”为题发表于美国物理联合会出版社(AIP Publishing)出版的《生物微流体》(Biomicrofluidics)期刊。
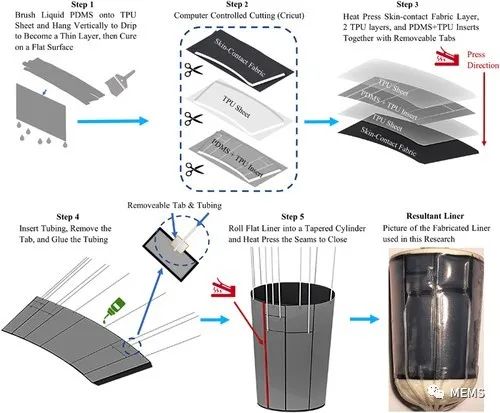
基于微流控的柔性机器人假肢制造过程示意图
全球超过80%的患者下肢截肢是由糖尿病足溃疡引起的,众所周知,糖尿病并发症会引起下肢不确定时间的水肿,使其体积增大10%或更多。
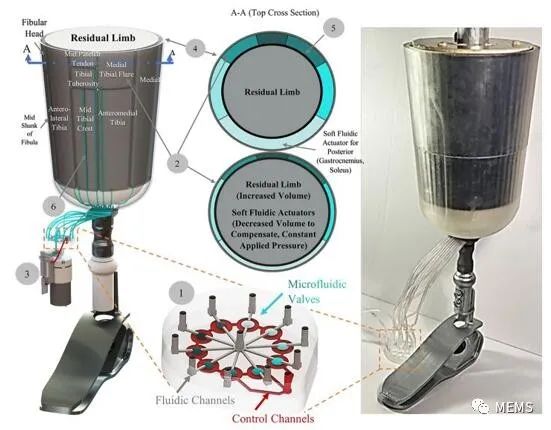
用于下肢截肢者的微流控柔性机器人假肢原型的概念验证图(左)和原型照片(右)(来源:滑铁卢大学滑铁卢微流控实验室)
通常,截肢后使用的假肢含织物和硅胶衬垫,患者可通过增加或移除它们来提高其贴合度。截肢者需要手动更换衬垫,但神经病变导致感觉不灵敏,使更换衬垫变得困难,这可能导致残肢部位更多的损伤。
该论文的合著者、滑铁卢大学(University of Waterloo)的Carolyn Ren说:“我们并不是创造了一种新型的假肢承窝,而是用集成了柔性流体致动器的单层衬垫取代了传统的硅、织物假肢衬垫,该新型衬垫作为接口层。这些致动器是根据残肢的解剖学结构设计的,在不同的压力下充气,以减轻假肢佩戴者的疼痛感并防止压疮。”
科学家们从一种最近开发的装置着手,该装置使用气动致动器来调节假肢承窝的压力。这个原始装置相当笨重,限制了其在现实场景中的应用。
为了解决这个问题,该科研团队开发了一种使致动器小型化的方法。他们设计了一个带有10个集成气动阀门的微流控芯片来控制每个致动器。整个系统由一个微型气泵和两个向微流控芯片提供空气的电磁阀控制。该控制箱小且轻,可以作为假肢的一部分佩戴。
该团队包括在假肢装置方面拥有丰富经验的医务人员,他们提供了一份假肢承窝所需压力的详细图解。研究小组对每个致动器提供的接触压力进行了广泛的测量,并将这些数据与可以正常使用的假肢所需的压力进行了比较。
研究发现,10个致动器均能产生预期范围内的压力,这表明新设备将在现实场景中运行良好。未来的研究工作,将在更逼真的生物模型上测试该方案。
该科研团队计划进行进一步研究,将压力传感器直接集成到假肢衬垫中,可能会使用含有压力传感材料的新型柔软针织织物。
论文链接:
https://aip.scitation.org/doi/full/10.1063/5.0087900
审核编辑 :李倩
-
微流控
+关注
关注
16文章
583浏览量
20121 -
柔性机器人
+关注
关注
1文章
39浏览量
4849
原文标题:基于微流控的柔性机器人假肢有望帮助糖尿病截肢者
文章出处:【微信号:Micro-Fluidics,微信公众号:微流控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
工业机器人的特点
明远智睿SSD2351开发板:语音机器人领域的变革力量
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
Apptronik利用德州仪器技术开发类人机器人
清华大学:软体机器人柔性传感技术最新研究进展

【「具身智能机器人系统」阅读体验】+两本互为支持的书
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+初品的体验
基于漩涡湍流辅助的微流控平台,可实现类精子结构的微型机器人一步成型






 工商网监
工商网监
评论