 Haptics系统主要由以下几部分组成
Haptics系统主要由以下几部分组成

作者:王云静 HUAWEI Team AFAA, 封磊 HUAWEI Team FAE
Haptics系统通过触觉反馈来实现人机交互,用户通过点触屏幕即可完成短信、打字、游戏等各种应用,得益于其简单方便的交互体验,Haptics已经成为了智能手机、平板电脑中广泛应用的人机交互方式。
Introduction
图1为Haptics系统的工作示意图,针对不同的应用场景,手机厂家会设计不同的效果波形,当屏幕控制器感应到用户的某种Touch操作后,触发Processor生成一个对应的振动指令和驱动波形给Haptics Driver IC,Driver IC对驱动波形进行放大和修正后,驱动Actuator执行对应的振动效果。
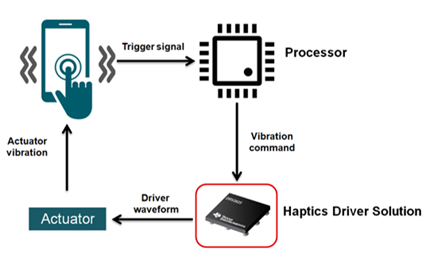
Figure 1, Haptics System
Haptics系统主要由以下几部分组成:
Processor:终端设备的处理器,当Processor接收到触觉触发信号时,会生成对应的振动指令和振动效果波形发送给Haptics Driver IC,将振动指令和效果传达出去。
Haptics Driver Solution:Haptics驱动方案,对Processor产生的振动波形进行放大和修正后,驱动Actuator产生振动。针对不同的Actuator,Haptics Driver Solution有所不同,除了相应的Driver IC,还包括必要的软件或算法程序,下文将会展开介绍。
Actuator:振动发生器,是Haptics系统中最为关键的一环,生成振动效果反馈给用户,是将电能转换为机械能的过程。常用的Actuator通常可以分为三大类:偏心转子马达(Eccentric Rotating Mass: ERM)、压电马达(Piezo)、线性谐振马达(Linear Resonant Actuator: LRA),根据振动方向的不同,LRA又分为Z轴LRA和X轴LRA。由于Piezo采用特殊压电材料制成,价格相比ERM和LRA要昂贵许多,在终端设备中很少使用,本文不作讨论。
2. EMR
如图2所示,ERM主要由四个部分组成,图片最左侧的偏心转子质量块用于产生振动;右上方的磁铁、马达壳、螺钉和主轴承组成ERM的定子组件;中间的无芯绕组、转向器电机轴组成ERM的电枢组件;下方的端盖组件用于固定和连接[1]。将ERM固定在终端设备上,即可将偏心转子旋转所产生的振动频率和强度传递给终端设备。
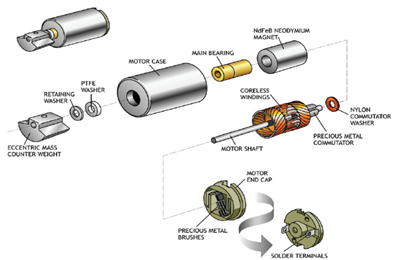
Figure 2, Eccentric Rotating Mass
ERM体积和重量都比较大,利用离心运动产生振动效果,震感比较强烈,并且振动频率可以从1Hz到300Hz,方案简单,价格低廉。
然而,ERM的构造决定了它的固有缺点:首先,ERM的驱动波形为DC波形,通常随着输入电压增大,ERM的振动增强,但由于ERM体积和重量都比较大,需要驱动电压大于一定值时,才能开始振动,因此相比于其他类型的Actuator,ERM的功耗通常较大;第二,ERM利用离心运动产生振动效果,振动响应速度慢,起震和停止的速度都比较慢,触觉体验不好。
针对ERM的特点,TI提供了多种Driver Solution,Driver芯片集成了Overdrive过载驱动和Brake刹车功能[2],能够减小ERM的起震时间和停止时间,改进ERM的触觉反馈效果,如TI的DRV2603/DRV2604/DRV2605等Haptics Driver IC,具体设计方案可以参考DRV2605的Evaluation Kit, http://www.ti.com/lit/ug/slou389a/slou389a.pdf。
3. LRA
LRA可以被认为是质量弹簧系统,该系统的质量系统在AC驱动信号的驱动下进行线性运动,产生所需的触觉反馈振动效果。不同于以DC电压进行驱动的ERM,LRA需要由AC信号驱动。若LRA在驱动信号作用下沿Z轴振动,即为Z轴LRA;若LRA在驱动信号作用下沿X轴振动,则为X轴LRA。相比ERM,LRA的体积更小,重量更轻,振动响应速度快,起震和停止的时间都很短,触觉反馈体验更加清脆。
图3为LRA系统的频率响应,组成LRA的质量弹簧系统是一个Q值很高的谐振系统,偏离谐振频率的频率响应急剧下降。如图3所示,LRA共振频率可能由于制造公差和环境因素等变化而变化。因此,为了达到最大的振动强度,需要确保其驱动频率始终能跟踪LRA的谐振频率点。
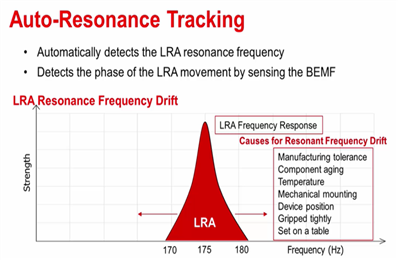
Figure 3, LRA Frequency Response
TI的Haptics Solution使用Auto-F0 Tracking算法检测LRA的谐振频率F0,使驱动信号的频率跟踪LRA的谐振频率F0,以实现LRA更好的振动效果。下面以TI针对Z轴LRA的Haptics Solution为例,介绍TI Haptics Solution使用的Auto-F0 Tracking算法如何工作。
3.1 Z轴LRA
如图4所示,Z轴LRA的主要由5部分组成:移动质量块、弹簧、音圈、磁铁以及端盖组件,通过音圈的电流在移动质量块上施加机械力使质量块上下移动,驱动LRA振动[1]。因为图4所示LRA在驱动信号作用下沿着Z轴方向振动,故称Z轴LRA。
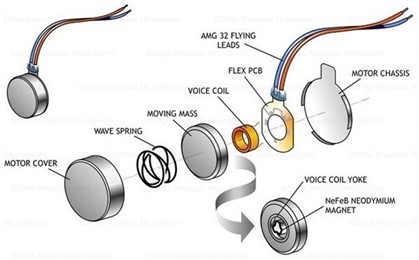
Figure 4, Z-axis LRA
TI的 DRV260X系列Haptics Solution可以直接用于Z轴LRA,集成了LRA驱动所需的Auto-F0 Tracking算法。以图5所示的DRV2605为例,Auto-F0 Tracking是以Back-EMF检测模块为核心构成的闭环控制算法[2]。
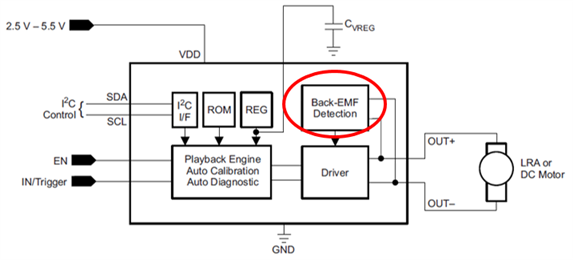
Figure 5 DRV2605 Block Diagram
Auto-F0 Tracking的原理如下:Haptics Driver施加在LRA音圈的电流将在LRA内部质量块上产生机械力,驱动LRA线性振动,随着LRA内部质量块的移动,LRA音圈相对于磁场的移动也将产生反向电动势(Back-EMF),图5中DRV2605的Back-EMF模块将检测LRA产生的Back-EMF电压,根据Back-EMF电压与频率特性的对应关系可以确定LRA系统的谐振频率F0。
通过Auto-F0 Tracking得到的F0频率,一方面可以应用于驱动振动的波形频率,得到更有效的振动;另一方面,也可以直接应用于与驱动振动的信号反相的刹车信号,使振动停止非常迅速。这种Auto-F0 Vibration & Braking机制最终使Haptics系统得到清脆不拖沓的触觉反馈效果。针对Z轴LRA的Haptics Solution可以参考DRV2605, http://www.ti.com/lit/ds/symlink/drv2605.pdf。
3.2 X轴LRA
相比ERM,Z轴LRA的振动效果已经有很大提升,但是由于Z轴LRA振动方向沿着Z轴,即上下振动,在厚度比较薄的终端设备中,振动幅度受限,而X轴LRA则解决了这一限制。
如图6所示,X轴LRA一般为矩形,主要由5部分组成:移动质量块、音圈、磁铁、弹簧和端盖组件。弹簧连接在质量块的左右两侧,因此LRA振动在X平面,具有更大的振动空间,可以达到更大的振动幅度。
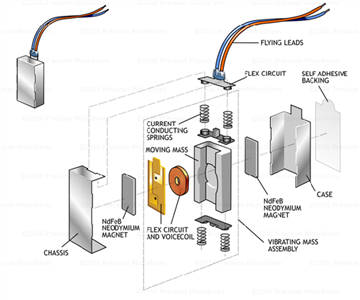
Figure 6, X-axis LRA
和Z轴LRA类似,X轴LRA频率响应的Q值非常高,因此也需要Auto-F0 Tracking来完成驱动信号频率对LRA谐振频率的追踪。除此之外,由于X轴LRA振动在X轴方向,具有更大的振动幅度,因此需要更高的驱动电压。
TI提供Smart Amp作为X轴LRA Haptics Driver的Solution。一方面,Smart PA内部集成了BOOST结构,能够提供X轴LRA需要的高驱动电压;另一方面,Smart PA集成了IVsense Feature可以检测LRA的Back-EMF电压[3],通过图7所示的算法结构完成LRA谐振频率F0的追踪和驱动波形频率校准。详细设计请参考TAS2562,http://www.ti.com/lit/ds/symlink/tas2562.pdf。
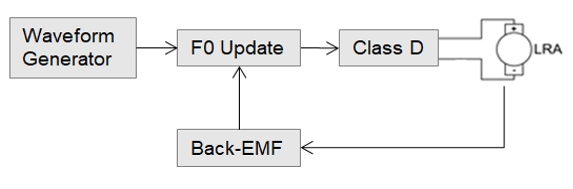
Figure 7, Auto-F0 tracking for X-axis LRA
4.Summary
综上所述,本文详细介绍了Haptics系统的工作原理和ERM/LRA的特点,针对不同的Actuator,TI提供全方位的Haptics Solution,包括Haptics Driver IC和相应的Driver Algorithm。随着智能手机越来越薄,我们可以预见的是X轴LRA会得到越来越多的应用,以帮助用户获得更好的触觉反馈体验。
审核编辑:何安
-
模拟
+关注
关注
7文章
1439浏览量
84673
发布评论请先 登录
电机控制系统原理是什么?由哪些部分组成?
辅助电源系统由什么组成
通信开关电源柜由几部分组成
发动机冷却系统由哪些部分组成
焊接专机是由几部分组成的

RTU主要由哪些硬件组成?各自的功能是什么?






 工商网监
工商网监
评论