 stm32的任务调度方式和步骤
stm32的任务调度方式和步骤

STM32的任务调度可以有两种方式
- 1)通过systick_handler定时器调度
-
2)执行一个系统调用
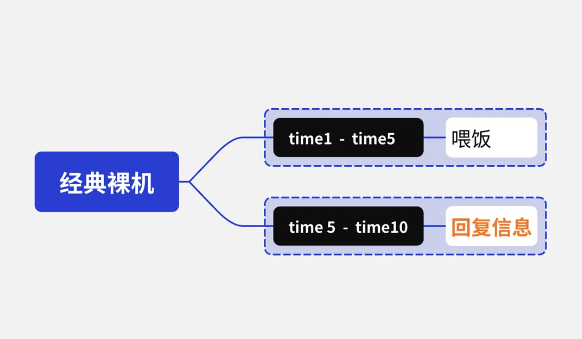
任务调度的步骤总结为如下:
- 保存程序的上下文即当前任务的寄存器,保存存储寄存器的任务堆栈的地址。
- 根据下一个任务的任务堆栈地址依次弹出下一个任务的16个寄存器。
堆栈中的寄存器保存顺序如下,
XPSR
SP(代表MSP或PSP,在任务调度完成后,根据PSP的值定位了是哪个任务)
LR(存储函数的返回)
R12
R3
R2
R1
R0
R11
R10
R9
R8
R7
R6
R5
R4
文章整合自:简书生若夏花_1ad0
编辑:ymf
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
寄存器
+关注
关注
31文章
5447浏览量
125384 -
定时器
+关注
关注
23文章
3305浏览量
119753 -
函数
+关注
关注
3文章
4388浏览量
65311
发布评论请先 登录
相关推荐
热点推荐
同步任务开发指导
,例如无法单例创建的类对象实现的方法。
使用TaskPool处理同步任务
当调度独立的任务,或者一系列任务为静态方法实现,或者可以通过单例构造唯一的句柄或类对象,可在不同
发表于 06-19 07:57
I/O密集型任务开发指导
is ${err.message}`)return false; })}return true;}
使用TaskPool执行包含密集I/O的并发函数:通过调用execute()方法执行任务,并在回调中进行调度
发表于 06-19 07:19
CPU密集型任务开发指导
以及后台长时间的模型预测任务分别进行举例。
使用TaskPool进行图像直方图处理
实现图像处理的业务逻辑。
数据分段,通过任务组发起关联任务调度。创建TaskGroup并通过ad
发表于 06-19 06:05
快速入门——LuatOS:sys库多任务管理实战攻略!
的开发者,这里将用最简明的步骤,助你轻松实现多任务应用开发! sys库是LuatOS的核心系统调度库,它基于Lua协程机制实现了实时多任务调度
工控一体机多线程任务调度优化:聚徽分享破解工业复杂流程高效协同密码
任务调度作为工控一体机管理和协调各项任务的关键机制,其优化程度直接关乎工业生产的效率、稳定性与精准度,宛如一把关键钥匙,解锁工业复杂流程高效协同的大门。 工业复杂流程与多线程任务
STM32与机智云连接实现步骤与技巧(下篇):机智云代码移植与优化
在《STM32与机智云连接实现步骤与技巧(上篇)》中,我们介绍了硬件连接和通信协议配置。本篇将重点讲解如何将机智云相关代码移植到STM32,完成数据上传和设备控制。我们将介绍如何在STM32

STM32与机智云连接实现步骤与技巧(上篇)
通过STM32与机智云的连接,开发者可以实现设备的远程控制和数据管理,提升物联网应用的智能化水平。本文将介绍STM32与机智云连接的具体步骤,涵盖硬件连接、通信协议配置、数据传输及云平台应用开发等
京东百万级调度系统(Buffalo)架构解密
平台有数十万任务,百万+依赖关系,日均百万+调度频次,不仅关系复杂、执行量大,且系统的任何细微异常,都可能导致数据链路异常,核心数据受损,这对调度系统的稳定性和性能带来了不小挑战。 3. 数据加工场景复杂需支撑丰富

AGV监控与任务管理系统设计
AGV在智能物流中核心,助力工业4.0和中国制造2025。AGV管理监控调度系统实时监控、任务管理、路径规划,确保高效便捷。AGV市场前景广阔,解决人口红利丧失、劳动力成本上升等问题,物流装备业迎来机遇。
数字化工厂物流核心技术—AGV调度系统
AGV是自动导引运输车,用于工厂物料搬运。AGV调度系统解决通信问题,实现任务调度、路径规划、交通管制等功能,与MES、ERP等系统对接,推动智能物流和无人工厂发展。
STM32、Arduino、树莓派开发方式差异大吗
最近看到有网友问:STM32、Arduino、树莓派开发方式差异大吗? ? 要说相同点,它们之间也有很多相同点。但你要说他们之间开发的差异,其实也蛮大的。 ? STM32、Arduino、树莓派三者
基于Flexus X加速MySQL镜像搭建XXL-JOB任务调度平台
平台,展示如何利用 Flexus X 的高性能特性提升任务调度的效率和稳定性。通过详细的步骤和配置,帮助大家可以快速掌握在 Flexus X 上部署和运行 XXL-JOB 的方法,并将其应用于实际项目中。

MES系统如何实现生产车间的实时监控、精准调度
MES系统通过数据采集、传输、处理和展示等技术手段,实现了生产过程的实时监控;同时,通过生产计划优化、生产任务分配、动态调度、资源优化和协同管理等功能模块,实现了生产过程的精准调度。
工业机器人常用的编程方式
工业机器人的编程是确保机器人能够执行特定任务的关键步骤。编程方式多种多样,每种方式都有其特定的应用场景和优势。 工业机器人编程概述 工业机器人编程是为机器人设计和创建指令序列的过程,这
Linux调度器的核心scheduler_tick介绍
scheduler_tick在Linux内核中扮演着关键角色。它不仅负责处理定时器中断和更新系统时间,还记录进程的运行时间,并决定是否需要进行任务切换。通过这些功能,scheduler_tick有效保障了系统的时间管理和任务调度





 工商网监
工商网监
评论