 RoboBee的折纸启发式制造工艺是否可以用于构建多种规模的机器人?
RoboBee的折纸启发式制造工艺是否可以用于构建多种规模的机器人?

哈佛大学的研究人员使微型哈佛微型机器人(HAMR)变得更加小巧。下一代受蟑螂启发的机器人只有一分钱大小,并且可以每秒13.9体长的速度运行。
这使其成为迄今为止最小,最快的微型机器人之一。该团队还认为,它是同等规模中最灵巧的机器人。
该机器人被称为HAMR-JR,是其前身的一半比例版本,研究人员教该机器人在水下游泳和行走。
该团队构建了HAMR-JR,部分是为了测试用于构建HAMR和其他微型机器人(例如RoboBee)的折纸启发式制造工艺是否可以用于构建多种规模的机器人-从像HAMR-JR这样的小型机器人到大型机器人,工业机器人。
他们发现,即使在微观尺度上,他们也能够使设计保持同样的复杂性。
研究人员还希望了解缩小机器人的规模将如何影响其运行速度和其他功能。他们将四足式HAMR-JR的身长缩小到仅2.25厘米-重量约为0.3克。该小组模仿了类似规模的昆虫的运动,因此HAMR-JR能够小跑,跳跃,束缚和打叉。它可以左右旋转,也可以向后小跑。
Jayaram说:“大多数这种规模的机器人都非常简单,只展示基本的移动性。” “我们已经证明您不必牺牲灵活性或控制尺寸。”
Jayaram及其合著者Samantha Castellanos,E.Farrell Helbling和Jennifer Shum在本周举行的国际机器人自动化国际会议上介绍了他们的发现,麻省理工学院的团队还介绍了提高软机器人的空间感知能力和抓取精致物体能力的工作。
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
29933浏览量
214372 -
微型机器人
+关注
关注
0文章
111浏览量
19926 -
工业机器人
+关注
关注
91文章
3466浏览量
94511
发布评论请先 登录
相关推荐
热点推荐
工业机器人:现代制造业的智能引擎
的发展与应用 ?? 工业机器人最早应用于20世纪60年代,主要用于汽车行业的焊接、喷涂等重复性工作。如今,其应用范围已大幅扩展,涵盖装配、搬运、检测、包装等多个环节。例如,在电子制造业
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
机场智能指路机器人主要依靠感知系统、定位系统、导航系统、智能交互系统和运动系统协同工作,来实现为旅客准确指路和提供服务的功能,以下是其详细工作原理:
感知系统
传感器类型 :机器人配备了多种传感器
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
阅读心得体会:ROS2机器人视觉与地图构建技术
通过对本书第7章(ROS2视觉应用)和第8章(ROS2地图构建)的学习,我对机器人视觉感知和自主导航的核心技术有了更深入的理解。以下是我
发表于 05-03 19:41
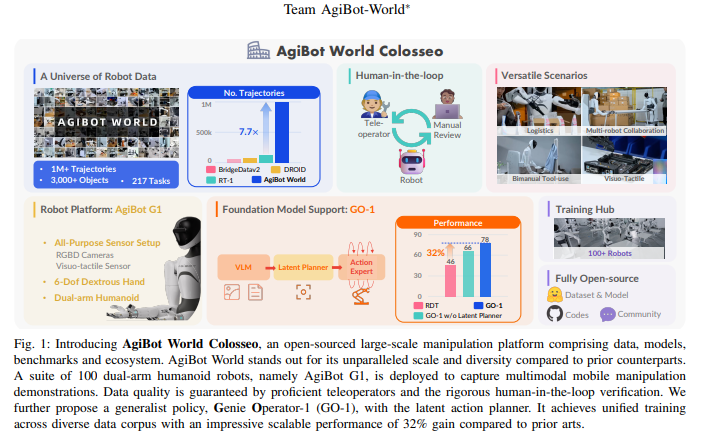
AgiBot World Colosseo:构建通用机器人智能的规模化数据平台
AgiBot World Colosseo:构建通用机器人智能的规模化数据平台 随着人工智能在语言处理和计算机视觉领域取得突破,机器人技术仍面临现实场景泛化能力的挑战。这一困境的核心在
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
的应用功能就可以被快速分享了。
例如,我做的自主导航功能你可以用,你做的物体抓取功能我也可以用, 只需开发一个标准化的软硬件平台,在此之上的应用就会逐渐流行 ,这将打造机器人领域的一个
发表于 03-03 14:18
精准对接:焊接机器人视觉定位系统如何革新制造工艺
随着制造业的自动化水平不断提高,焊接工艺也在向更高效、更精确的方向发展。尤其是在自动化焊接领域,视觉定位系统的引入为焊接机器人提供了前所未有的精度和灵活性。今天一起了解焊接机器人视觉得
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
取特征点,涉及大量像素级比较运算;优化机器人位姿,需要迭代求解大规模矩阵方程。书中提出了模块化的硬件加速方案,阐述了如何以因子图为通用模版,以求解非线性优化问题为桥梁,面向多种机器人应
发表于 01-04 01:15
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
的各个方面。
第5部分(第14章)通过一个实际案例的应用研究对本书提到的概念进行总结,作者实际构建了一个具身智能机器人计算系统,用于室内仓储环境下的物体获取、放置、归纳等任务。
二、具身智能
发表于 12-28 21:12
《具身智能机器人系统》第7-9章阅读心得之具身智能机器人与大模型
医疗领域,手术辅助机器人需要毫米级的精确控制,书中有介绍基于视觉伺服的实时控制算法,以及如何利用大模型优化手术路径规划。工业场景中,协作机器人面临的主要挑战是快速适应新工艺流程。具身智能通过在线学习
发表于 12-24 15:03
【「具身智能机器人系统」阅读体验】+初品的体验
的学习资源,以培养更多的专业人才。随着具身智能机器人技术对社会的影响越来越大,该书还可以向公众普及相关的知识,以提升社会对新技术的认知和接受度,从而为技术的发展创造良好的社会环境。
随着具身智能机器人技术
发表于 12-20 19:17
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
要给AI这个聪明的“头脑”装上一副“身体”。这个“身体”可以是一部手机,可以是一台自动驾驶汽车。而人形机器人则是集各类核心尖端技术于一体的载体,是具身智能的代表产品。与传统的软件智能体不同,具身智能
发表于 12-19 22:26
利用NVIDIA Isaac平台构建、设计并部署机器人应用
机器人在智能制造设施、商业厨房、医院、仓库物流和农业领域等不同环境中的应用正在迅速扩展。该行业正在向智能自动化转变,这需要增强的机器人功能来执行感知、地图构建、导航、负载处理、物体抓取

医疗机器人有哪些_医疗机器人有哪些应用
医疗机器人是医用机器人工程的重要应用,结合了各个学科最新研究和发展的成果,并广泛应用于医学诊疗、康复等医学领域。医疗机器人的类型多种多样,以





 工商网监
工商网监
评论