 简述KUKA外部轴的几种应用
简述KUKA外部轴的几种应用



对于旧的8.2X系统使用的外部轴插件是SynchroMove

对于最新8.3X系统
要分两种:
WorkVisualAddOnVKR:
用于气伺服焊钳和其他软件控制电伺服焊钳或其他伺服设备(由机器人以外设备控制伺服电机设备)例如:伺服铆钳,气伺服焊钳

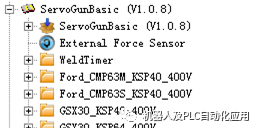
ServoGunBasic:

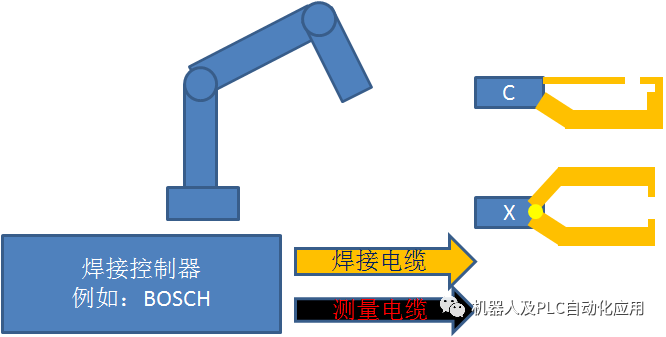
用于KUKA机器人直接供电控制使用,KSP供电控制使用。

WELDTIMER 分配与焊接控制器相 关联例如:BOSCH

ServoGun:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
29933浏览量
214368 -
伺服电机
+关注
关注
88文章
2134浏览量
59907 -
KUKA
+关注
关注
3文章
218浏览量
17059
原文标题:简述KUKA外部轴的几种应用
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
adxl355读数异常,三轴中某一轴数据始终为0怎么解决?
z轴异常,xy正常),请问出现这种现象可能的原因是什么?拆装过程中过大的外部激励是否会导致这种现象,以及有什么解决方法?
发表于 08-13 07:32
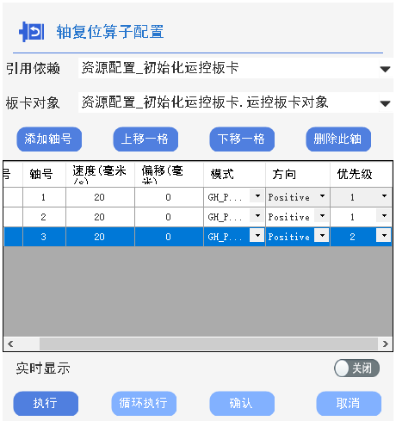
GraniStudio零代码平台轴复位算子支持多少个轴同时复位,有哪些回零模式?
GraniStudio平台在轴复位的功能上未对同时复位的轴数进行硬性限制,理论上支持任意数量轴同步复位,需要考虑的是在做多轴同步复位时要评估机械安全风险,建议提前确认机械在多
电机为什么会产生轴电流?
电机是现代工业中不可或缺的动力设备,广泛应用于各种机械系统中。然而,在电机的运行过程中,有时会出现一种被称为“轴电流”的现象,这种现象不仅会影响电机的正常运行,还可能导致设备的损坏。那么,电机


库卡KUKA机器人常见故障维修
1、KUKA机器人伺服电机维修过热原因 ①电源电压过高; ②电源电压过低,电机在额定负载下运行,电流过大使线圈发热; ①修理和拆卸线圈时,热拆卸方法不正确,会烧坏铁芯; ①发动机过载或频繁启动
Chart FX——坐标轴简介
坐标轴是最重要的元素之一,因为读者需要借由其所包含的信息来理解图表。在大多数情况下,图表是以 XY 坐标系绘制的。数值或 Y 轴显示数值数据所代表的数值范围,而类别轴或 X 轴则显示图


外部端口和内部端口是什么意思
在计算机网络和网络安全领域,"外部端口"和"内部端口"这两个术语通常用来描述网络通信中的端口配置和访问控制。 外部端口(External Port) 外部端口通常指的是面向互联网或外部

单片机io一般包含哪几种状态
单片机的IO口(Input/Output,即输入输出端口)通常包含以下几种状态,这些状态使得单片机能够灵活地与外部设备进行数据交互和控制。以下是对这些状态的说明: 输入状态(Input State
带你了解中空轴步进电机作用
?中空轴步进电机的主要作用包括优化机械设计、方便布线及节约设计空间和生产成本,同时满足特定的精度要求。
中空轴步进电机,也称为空心轴步进电机,其设计特点允许轴中心具有空心孔,这种空心结构带来了多重优势。

单轴和双轴测径仪在线缆方面的应用
单轴测径仪的应用
单轴测径仪主要用于检测线缆的单个方向外径尺寸,适用于圆度良好且不需要检测不圆度的线缆。它通过光电检测原理进行高精度尺寸检测,内置PID调节功能,可以控制牵引机或挤出机的速度,完成
发表于 08-16 17:48





 工商网监
工商网监
评论