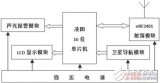
 如何正确车距检测预警HMW与前车碰撞预警FCW
如何正确车距检测预警HMW与前车碰撞预警FCW

车距检测预警技术同样是检测本车与前车的车距(HEADWAY),在车距过近的情况下向驾驶员发出警报。因为车距Headway一般会换算成时间显示出来,所以容易与FCW的碰撞时间混淆,但是HMW的车距时间和FCW的碰撞时间(TTC)计算方式是不同的:
Headway车距时间 = 两车车距 / 本车的车速
FCW的碰撞时间(TTC)= 两车车距 / 两车的相对车速
比如,当前后两车的距离为20米,前车的车速为60Km/h,后车的车速为80Km/h, 那么HMW显示的时间就是1.2秒,而FCW显示的TTC碰撞时间就是3.6秒。如果前后车的车速都为60Km/h,那么HMW显示的时间同样是1.2秒,而FCW不会报警,因为两车虽然距离很近,但是速度相同,并不会追尾。所以,在前后车都处于运动状态时,FCW的TTC碰撞时间一般要长于Headway车距时间。
在实际场景中,HMW主要在车距近的情况下报警,可以帮助驾驶员养成开车保持车距的规范驾驶习惯,我们将其定义为“危险不紧急”型功能;而FCW主要针对前后两车距离较近且存在较大速度差的紧急情况,比如前车急刹,属于“危险且紧急”型功能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
预警
+关注
关注
1文章
47浏览量
14672 -
智能汽车
+关注
关注
30文章
3120浏览量
108517 -
车距监测
+关注
关注
1文章
2浏览量
7014
发布评论请先 登录
相关推荐
热点推荐
利用RFID和卫星导航技术实现车距监测的预警
汽车为人类社会的发展做出了突出的贡献,但也带来了触目惊心的伤害。近年来,随着高速公路的发展,汽车行驶速度提高,恶性交通事故频发。在车祸造成的死亡事故中,追尾占25%。因此,研究能够随时获取道路和车辆信息,并及时提醒汽车驾驶员采取措施避免危险的车距监测
发表于 09-27 15:01
?1751次阅读
激光雷达在无人驾驶技术中的应用解析
做出任何回应,那么车辆就会自动刹车。5. 前方碰撞预警系统 Forward Collision Warning (FCW)FCW 能够通过雷达系统和摄像头来时刻监测前方车辆,判断本
发表于 10-18 17:18
想买个ADAS的开发板。完成功能有LDW, FCW 行人检测 车距监控等,芯片是BF609,请问应该买什么型号?
你好!想买个ADAS的开发板,完成功能有LDW, FCW 行人检测 车距监控 等,芯片是BF609,那么开发板的型号是啥?
发表于 07-31 07:09
流媒体后视镜 柔光夜视清盲区实用性强
,拥有五倍后视视野之外,能真正做到后视镜的功能精华,多功能集于一身。拥有非常强大的自然语言控制能力,还集成ADAS高级驾驶辅助,支持前方碰撞预警FCW、前车启动提醒PVS、车道偏移
发表于 12-13 16:33
怎么设计基于FPGA的车道偏离预警系统?
公路交通安全管理局(NHTSA)2009年乘用车在交通事故中碰撞位置的统计数据,在各种交通事故中,车辆前部碰撞占到总事故的62%,而这其中多数是由于车道偏离车道所引起的交通事故,因此通过设计汽车车道偏离预警系统有效地减少前向
发表于 09-18 08:28
基于FPGA的目标碰撞预警系统
为了解决空间目标与航天器发生碰撞的问题,设计了一种基于FPGA,以在轨目标三维坐标为待处理数据进行快速并行处理的目标碰撞预警系统。该系统基于Xilinx 公司FPGA芯片中的内容可寻址存储器(Content Addressabl
发表于 03-07 15:29
?43次下载

关于AWS碰撞预警系统技术简介
AWS能在与前方车辆碰撞之前 秒(平均) 能在与前方车辆碰撞之前2.7秒 平均) 能在与前方车辆碰撞之前 发出碰撞预警。平常的驾驶员花费0.
关于车道偏离预警系统和前碰撞预警系统分析介绍和应用
这意味着,车道偏离预警系统(LDW)和前碰撞预警系统(FCW)将正式成为营运客车的标配,而这两项预警功能恰恰又是ADAS汽车防撞
部分商用车企业批量采购ADAS预警设备
功能。因为疫情原因,这一法规推迟至2020年9月开始执行。 根据中国交通部及相关媒体数据,2020年7月份开始,部分商用车企业开始批量采购ADAS预警设备,从2020年9月1日到12月底重型牵引车(营运类) 搭载ADAS (FCW
发表于 10-15 14:49
?522次阅读

为你的智能座驾选择适宜的存储器
纵观整个市场,现在的汽车究竟搭载了多少复杂的功能?自动泊车、碰撞警告、主动刹车、ACC自适应巡航、VSA车联网检查、ISA电子警察系统、TMC实时交通系统、360环视、并线辅助、LDWS车道偏移警告系统、HMW





 工商网监
工商网监
评论