 工业CAN2.0及CAN-FD隔离器及共模干扰抑制模组
工业CAN2.0及CAN-FD隔离器及共模干扰抑制模组

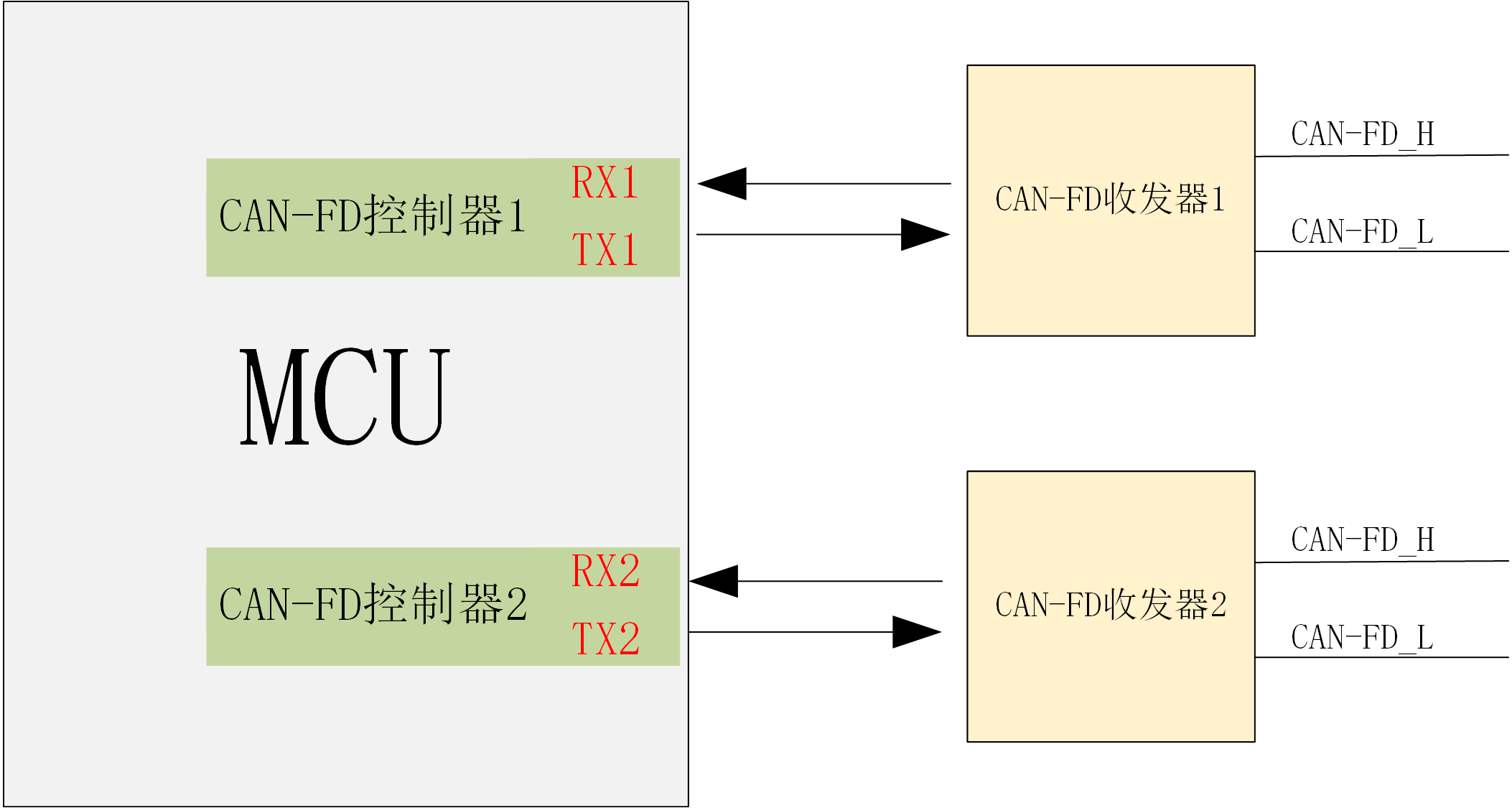
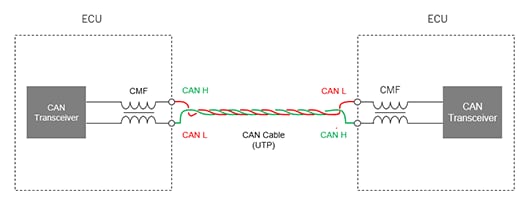
随着工业2025的推进,现在自动化机械臂控制全面由传统CAN 9600-115200波特率升级CAN2.0 1M乃至CAN-FD 4M高速协议,工业自动化机械臂多节点于工程布线时采用CAN2.0(或以上)总线通信,电脑控制端俗称上位机与多个CAN收发节点实时双工通信。 工业自动化工程现场高速CAN总线弱电通信信号及传输电缆需与220V/380VAC强电动力电、超大功率变频、接触器、电机等高电磁辐射源同处共舞,隔离与抑制总线上CE差模以及RE共模电磁干扰成为刚需,目前CAN2.0高波特率(大于1Mbps脉冲,傅立叶级数展开高频谐波频段高达到50M)要求系统报文延时小于2ms, 严格意义上从而对总线通信带宽与共模抑制Trade off迎来严峻挑战! 实测需要高CMRR共模抑制(双线并进,零漏磁环牛,高耦合系数), 高-中-低频(尤其是高积分高能量的接近于直流的50~100Hz超低频辐射频域段)广谱频域响应要求至少不小于1HX2感值@1M,CANH/L间寄生容值小于150pF,抗饱和度不小于10A电涌端口冲击。
大印蓝海工作室作品专注于工业自动化机械系统通信信号完整性解决方案, 成功应用于极速SMT贴片机,工业机器人,工业自动化控制、电机驱动,工业消防、新能源汽车,锂电池管理BMS,充电桩,工业智能照明行业等应用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CAN
+关注
关注
57文章
2937浏览量
468908 -
信号完整性
+关注
关注
68文章
1459浏览量
96978
发布评论请先 登录
相关推荐
热点推荐
CAN FD协议及其与CAN2.0的异同
我们知道了, CAN2.0数据段只有8byte,最高速率为 1Mbit/s,通常使用的是 500k,随着功能的逐渐增多,各 ECU 之间的信息交互也越多,导致总线负载持续走高;CAN 报文中只有
发表于 11-21 11:54
?5876次阅读
如何从传统的CAN用法中设置CAN-FD?
您好 NXP:
我们在 s32k312 平台中使用了经典的 CAN 总线(2.0/固定 8 字节数据),现在我们想升级
CAN-FD 格式。我设置了 CAN-FD 参数(经典
发表于 04-14 11:32
多核异构-双核高速率CAN-FD评测
产业的发展,各种传感器和控制器数量的增多,总线上的数据量也激增,这使得CAN2.0总线在传输速率和带宽方面的缺点暴露的更加明显,于是就诞生了CAN-FD。
发表于 02-17 15:37
TDK CAN FD用共模滤波器ACT1210D系列的介绍
TDK CAN FD用共模滤波器中的ACT1210D型产品是一种通过包含绕组工艺的独有结构设计,使泄漏电感、寄生电容、模式转换特性最小化,针

TDK CAN FD用共模滤波器实现更大容量数据的高速通信
TDK CAN FD用共模滤波器中的ACT1210D型产品是一种通过包含绕组工艺的独有结构设计,使泄漏电感、寄生电容、模式转换特性最小化,针

STM32设备上的CAN FD
本文件的目的如下所述:
?概述具有灵活数据速率(CAN-FD)协议的控制器局域网(CAN)。
?描述CAN-FD相对于经典CAN
发表于 08-28 10:34
?9次下载
简单介绍基于CAN-FD的诊断通信传输层
CAN-FD是CAN withFlexible Data-Rate的简称,从名称可以看出,CAN-FD的数据速率是可变的。
发表于 11-10 17:46
?2856次阅读
干货分享|基于HPM6750 CAN2.0 及 CAN- FD 操作指南
简介本文主要介绍了HPM6750的控制器局域网CAN(以下简称CAN控制器)的概述以及基于HPM-SDKCAN控制器的开发指导(包括实现

如何使用DSLogic分析CAN/CAN-FD 信号?
一文档介绍本文将一步步介绍如何使用DSLogic逻辑分析仪采集并分析CAN/CAN-FD信号,因为CAN信号的测量和CAN-FD的大致一样,所以下文以

什么是CAN2.0协议?
CAN2.0协议是控制器局域网络(ControllerAreaNetwork,CAN)的一种版本,也被称为传统CAN协议,由德国博世BOSCH公司开发,并已成为国际上广泛应用于汽车电子






 工商网监
工商网监
评论