 从“有图”到“无图”再到“轻图”,自动驾驶地图选择为何这么折腾?
从“有图”到“无图”再到“轻图”,自动驾驶地图选择为何这么折腾?

[首发于智驾最前沿微信公众号]在手机导航还未出现的年代,很多人出行主要依靠纸质地图,有人希望地图可以描述得很详细,这样可以获得更多的交通信息;而有人觉得靠眼睛看路牌,再问问路人会更加方便;还有一些人习惯看一些简图或者保留关键信息的手绘地图,这样可以更加清晰明了地获取关键信息。
将这些习惯类比到自动驾驶汽车,恰好可以对应到自动驾驶行业不可不提的地图技术,在自动驾驶技术诞生初期,高精度地图的使用非常火热,但随着技术的发展,很多企业开始追求无图的方案,直到现在,又有一些企业开始推出“轻图”的技术,为何自动驾驶地图发展会如此折腾?

为什么早期自动驾驶都要“有图”?
高精度地图(我们常说的“有图”)的核心价值在于它把道路上车道的精确位置、车道之间的连接关系、固定的交通标志、路缘线、停车线等等静态信息提前告诉了车子。这些信息可以让车辆定位和路径规划的难度大幅度降低。举个简单的类比,如果你去一个陌生城市开车,有一张详细的导航图你就知道哪条是车道、哪条不能拐、哪儿是禁止停车的路段,开起来要省心得多。对于自动驾驶汽车来说也是一样,把环境的一部分“固定”下来,机器只要去处理动态的那一部分(行人、其他车辆、临时障碍),系统的整体复杂度和验证难度都会下降。高精度地图还能在夜间或恶劣光照下弥补摄像头的不足,定位精度也能达到车道级别,这对某些需要高可靠性的场景非常重要。
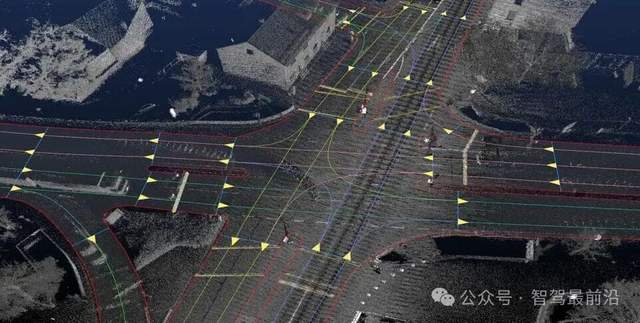
但是想要提前把“世界”画好其实有很多问题需要解决。地图不是一次性做完的,也很难保持最新状态,道路施工、临时标志、路面变更都会让地图信息过期,这就要求高精度地图可以随时更新。此外,做一张覆盖城市乃至国家级的高精度地图,成本会非常高,要用激光雷达、车队采集、大量后处理和人工校验。如果真的能做“画”完高精度地图,其数据量也是非常大的,实时把它同步到每辆车需要带宽和云端支持。正是出于这个原因,很多企业在自动驾驶落地时,会思考一个问题,那就是在所有场景里都用这种“厚图”是否划算?

无图思路的技术细节,靠“看”和“学”来替代地图?
面对高精度地图的高成本,一部分企业选择尽量少用或不用地图,依靠车载传感器和大规模数据训练来让车辆“自己看清楚世界”。这条路的技术就对包括强大的摄像头感知、稳健的多传感器融合、以及海量的场景数据用于模型训练等方面提出了要求。简单来说,无图方案把问题交给感知和学习,让摄像头、雷达实时感知车道线、信号灯、行人等;让神经网络基于历史数据学会在各种复杂情况下做出正确判断。
为了让无图方案更可靠,需要做一些工作来增强模型的稳健性和可用性。比如用仿真和数据增强来扩充训练数据,针对罕见场景做专项收集;通过多模态融合(把摄像头、毫米波雷达、IMU等信息融合)来弥补单一传感器的短板;再辅以在线学习和车队数据回传,让系统不断迭代。无图的优势是部署快、覆盖范围广,不需要事先把每条路都画好,特别适合希望迅速扩展服务的公司。
无图看起来比较适合自动驾驶技术大面积落地,但是对某些边缘场景(比如路标被遮挡、标线模糊、复杂交叉口)对模型的泛化能力要求极高;端到端学习的“黑盒”特性也让故障回溯和监管审查变得困难。这就要求在技术落地前必须用大量测试、冗余设计和安全边界来弥补这些不足,这在实践中并不容易。

轻图的技术实现,只保留“关键骨架”?
轻图(也叫稀疏地图)试图在“有图”和“无图”之间找到平衡。它不追求把每一块路面、每个路桩都详细刻录,而是只保存对车辆决策最关键且变化慢的信息。轻图通常包含车道中心线的拓扑关系、重要路口的连接信息、某些固定的交通规则点位和少量地标性特征。相比全密度点云,轻图的数据量小得多,更新频率也可以更低。
生成轻图的流程也比较工程化,先用车队的LiDAR、摄像头、IMU等设备采集路测数据,再用视觉里程计或SLAM算法做初步配准,接着用自动化工具提取车道线与拓扑,最后加少量人工校验。为了降低维护成本,轻图常常配合在线变化检测机制,即行驶车辆上报与地图不一致的区域,云端自动比对后决定是否需要人工复核或差分更新。这样既保留了地图对定位与规划的结构性支持,又把大部分更新工作交给自动化流程完成,成本更可控。
轻图通常作为结构化先验供自动驾驶汽车定位和规划使用,实时感知负责检测动态目标和可变信息。比如在匝道并线时,轻图提供车道连接关系,规划模块据此生成安全的轨迹,而摄像头与雷达负责实时监测周围车辆并进行避让。这种分工让自动驾驶系统在保持一定鲁棒性的同时,避免了高精度地图带来的沉重运维负担。

地图方案应该如何选?
地图方案并不没有最优选择,很大程度上会取决于业务场景与商业模型。如果产品是限定区域内运行(如厂区、园区、封闭高速),投入高精度地图并结合多传感器冗余往往是最稳妥的路径,因为这些场景能用较少的路段覆盖就实现高可用性和可验证性。但如果产品希望快速铺开到城市乃至全国,轻图或无图能够显著降低前期投入和扩张阻力。
未来自动驾驶地图可能朝着“分层与融合”而不是某一路线的方向发展。地图会做分层处理,静态且稳定的要素放到地图里,变动频繁的要素交给实时感知;地图制作与更新也会越来越自动化,利用变更检测、车队数据差分和云端差分更新来降低人工成本。同时,无图路线在感知、模型验证以及可解释性方面的研究会继续推进,让二者的边界或将越来越模糊。

最后的话
地图不是“灵丹妙药”,也不是“多余负担”。把地图看成系统里的一个模块,与感知、定位、规划和验证体系一起设计,才能在成本、可靠性和扩张速度之间找到合适的平衡。选择哪种地图策略,很大程度上取决于你要解决的场景、愿意承担的成本以及你对扩张速度与安全边界的偏好。短期内我们会继续看到各种路线并行,这不仅是技术多样性的必然,更是行业逐步成熟前必须经历的复杂博弈。
审核编辑 黄宇
-
自动驾驶
+关注
关注
790文章
14468浏览量
172293
发布评论请先 登录
端到端自动驾驶相较传统自动驾驶到底有何提升?

实时生成式地图对于自动驾驶来说有什么作用?

如何制作一张自动驾驶高精度地图?

为什么自动驾驶端到端大模型有黑盒特性?

自动驾驶中常提的高精度地图是个啥?有何审查要求?

只是加减速和转弯,为啥自动驾驶这么难实现?
2025年的自动驾驶技术有哪些升级?

自动驾驶技术测试有哪些?

新能源车软件单元测试深度解析:自动驾驶系统视角
AI将如何改变自动驾驶?
从L0到L5自动驾驶技术的演进阶段
2024年自动驾驶行业热点技术盘点
从《自动驾驶地图数据规范》聊高精地图在自动驾驶中的重要性

自动驾驶技术的典型应用 自动驾驶技术涉及到哪些技术
Mobileye端到端自动驾驶解决方案的深度解析






 工商网监
工商网监
评论