 为什么自动驾驶端到端大模型有黑盒特性?
为什么自动驾驶端到端大模型有黑盒特性?

[首发于智驾最前沿微信公众号]随着自动驾驶技术落地,端到端(End-to-End)大模型也成为行业研究与应用的热门方向。相较于传统自动驾驶系统中的模块化结构,端到端模型尝试直接从感知输入(如摄像头、激光雷达数据)映射到控制输出(如方向盘转角、加速度、制动等),以深度神经网络为核心,打通了从视觉到驾驶行为的完整链条。它也代表了自动驾驶从“规则驱动”向“数据驱动”的跃迁,展现了极高的潜力。当然这种结构也天然地带来了一个被广泛诟病的问题,那就是黑盒特性。简单说,就是我们不知道模型为什么做出这样的决策,更无法精准分析其推理过程。
要理解黑盒问题,我们首先得理解自动驾驶端到端模型的结构。传统自动驾驶系统通常由多个明确分工的模块组成,包括感知(识别障碍物、车道线、交通信号等)、定位(融合GNSS和IMU)、预测(判断周围目标的运动趋势)、决策(选择最优路径)和控制(具体执行加减速、转向指令)。这些模块之间通过接口通信,彼此独立而透明,方便调试、验证和解释。而端到端模型则打破这种结构,将所有环节打包为一个统一的大型深度神经网络。以“视觉到控制”为例,模型从摄像头获取图像,直接输出加速度或转向指令,其中的感知、判断和决策逻辑都隐含在神经网络中间层的参数中。这就意味着,即便我们能看到模型输出了一个左转指令,我们也很难知道它是因为识别到了左侧的路口,还是因为误判了交通标志、甚至是被某些环境噪声干扰所致。
之所以会形成黑盒现象,其根源在于深度神经网络的本质。一个典型的端到端模型可能包含几十甚至上百层的卷积层、注意力机制、非线性激活函数等成分,参数量可能高达数十亿。这些参数是在大规模数据集上训练出来的,并没有被人类明确指定意义。训练的目标通常是某种形式的预测准确性,比如轨迹误差最小、碰撞率最低等,而不是“让模型好解释”。在这个过程中,模型自动学习到了从原始输入到最终行为之间的复杂非线性映射,但它并不会像人类那样构建可见的逻辑链条。这种深度学习的方式虽然有效,但结果就是“你只能信它,而无法问它为什么”,这正是黑盒的典型表现。

在自动驾驶场景中,这种黑盒特性其实会产生很多问题。首先是安全性问题。自动驾驶系统要在现实中应对如夜间行驶、大雨天气、拥堵路段、突发横穿等无数复杂场景。如果一个模型在这些极端条件下做出了错误判断,而我们无法溯源原因,就意味着无法在下一次类似场景中对其加以修正。举个例子,曾经有测试中端到端系统将一个路边广告牌误识为停止标志并猛踩刹车,这种“鬼探头”式的行为,如果不能被精确解释并避免,将会严重影响用户的信任和系统的稳定性。
其次是可验证性和合规性问题。自动驾驶技术迟早要接受来自监管机构的严苛审查,而透明度是系统合规的关键标准。假设一个自动驾驶车辆在事故中造成了人员伤亡,法院和公众一定会追问,“系统为什么当时做出了这个决策?有没有证据表明它尽到了应尽的判断义务?”但如果系统基于端到端神经网络训练,输出是一个“直觉式”的结果,而不是一串清晰的推理步骤,我们便无法提供令人信服的解释。法律无法容忍“AI凭感觉判断”,这也限制了端到端模型在现实道路上真正规模化落地的可能。
除了外部监管,还有一个同样关键的问题是系统可维护性。在传统模块化自动驾驶系统中,如果发生异常行为,开发者可以逐个排查模块,找到是感知误检了物体,还是预测出现偏差,还是控制器延迟响应。而在端到端模型中,这种逐层定位问题的方式几乎无效,因为所有模块的功能都交织在一起,隐藏在权重矩阵和激活图中。要找出问题的根源,往往需要重新训练、调参甚至修改网络结构,而这是一项高成本、高不确定性的工程任务。
那么,有没有办法“打开”这个黑盒呢?从技术层面来说,有一些可行路径。一个重要的方向是“可解释人工智能”(Explainable AI, XAI)。XAI试图通过各种工具和方法,揭示神经网络内部的运算逻辑,让我们知道模型是依据什么特征做出当前判断。在自动驾驶中,比较典型的方法包括特征归因(如Grad-CAM、Saliency Map)、概念激活(Concept Activation Vectors)以及模型插值分析等。举个例子,如果我们能在一张图像中看到模型在预测左转时,激活的是图像左侧的路口区域,而不是天空或广告牌,那么就可以初步认为模型关注到了正确的区域。再如,若我们人为修改输入图像中的某个因素(比如遮住标志线),发现模型输出行为发生了显著变化,就可以推测该特征对模型有重要影响。
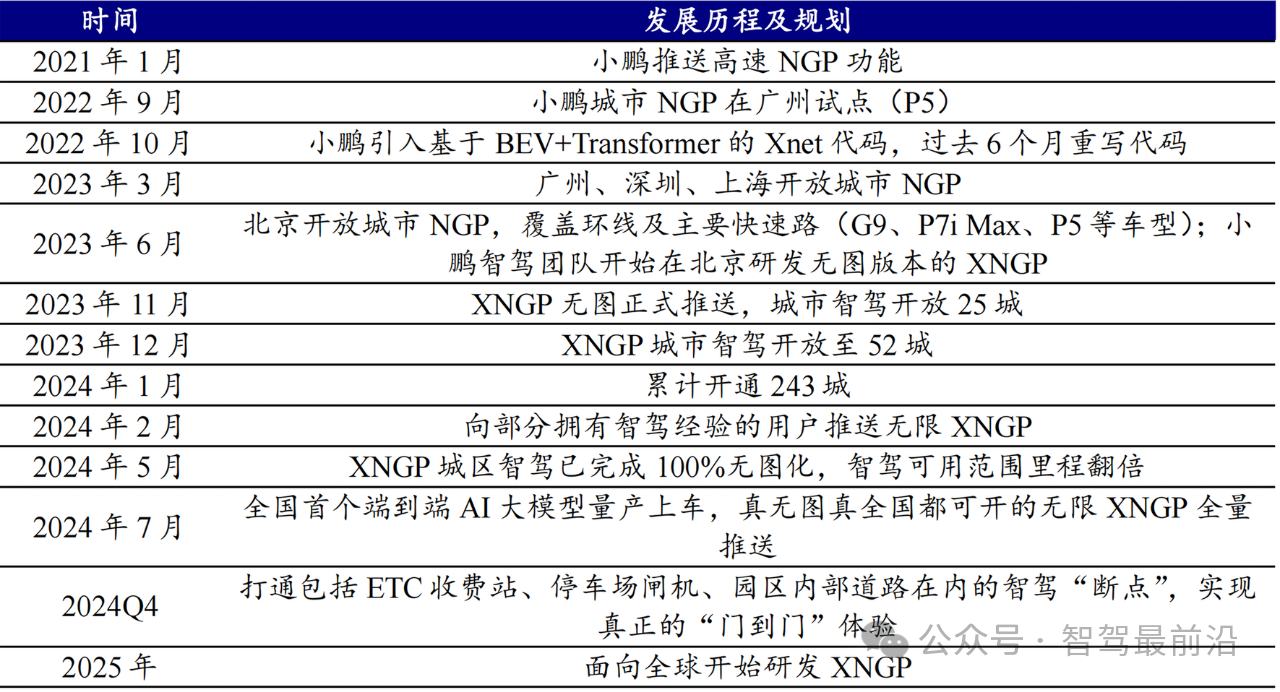
另一个方向是引入“结构可控”的中间层。很多研究正在尝试在端到端网络中嵌入一些“语义可解”的模块,比如显式的对象检测层、可视化注意力层、可控策略生成器等。通过让某些中间变量具有实际语义,比如“当前车道数”、“前方障碍距离”、“红绿灯状态”等内容,我们就能逐步恢复模型推理的可观测性。这种结构并不完全摒弃端到端思路,而是融合了模块化的透明优势与深度学习的强泛化能力,可视为“软模块化”的变体。特斯拉Autopilot的某些版本以及小鹏的XNet都在尝试类似路径,即在全感知-全场景决策的系统中,保留一部分对人类友好的中间表示,以便调试与优化。
同时,模型训练的方式也可以改进,强化可解释性。如在训练过程中加入可视化正则项、语义约束损失函数或中间监督机制,让模型在学习准确预测的同时,也要对中间结果进行约束,使得其更符合人类认知逻辑。此外,利用仿真环境进行可控场景生成,也有助于对模型在特定条件下的行为进行系统性分析,比如评估它在低光、强反光、遮挡等场景中的表现及其稳定性。
当然,提升端到端模型可解释性的技术仍处于不断发展之中,目前还难以做到完全透明。但这并不意味着我们必须选择“性能优先”而放弃“可解释性”。从产业角度来看,未来自动驾驶系统可能采用“多模型融合”的方案,即在主决策模型之外,引入多个副本模型进行行为校验、风险预测、异常检测等任务。如在车辆决定右转时,可以有一个并行模型判断该决策是否合理;如果两个模型存在严重分歧,则触发人机交互或执行安全策略。这种架构下,即便主模型是端到端的黑盒,我们也能通过外围系统来进行“旁路监督”,保障整体系统的安全与可解释性。
自动驾驶中的端到端大模型之所以具备强烈的黑盒特性,既有模型结构本身的复杂性原因,也与行业尚未建立起成熟的可解释性体系有关。要真正实现端到端模型在量产车上的广泛应用,必须从系统设计、训练机制、中间可视化到辅助审查等多个层面协同推进“拆箱”工程。未来可解释AI技术的进一步突破,以及产业界对透明决策需求的持续推动,有望让端到端大模型不再是黑盒,而是一个既聪明又可信的智能驾驶大脑。
审核编辑 黄宇
-
端到端
+关注
关注
0文章
35浏览量
10711 -
自动驾驶
+关注
关注
790文章
14364浏览量
171130 -
大模型
+关注
关注
2文章
3191浏览量
4147
发布评论请先 登录
Nullmax端到端自动驾驶最新研究成果入选ICCV 2025

端到端数据标注方案在自动驾驶领域的应用优势

自动驾驶中基于规则的决策和端到端大模型有何区别?

东风汽车推出端到端自动驾驶开源数据集
动量感知规划的端到端自动驾驶框架MomAD解析

DiffusionDrive首次在端到端自动驾驶中引入扩散模型

端到端自动驾驶技术研究与分析
端到端在自动泊车的应用

爆火的端到端如何加速智驾落地?


Waymo利用谷歌Gemini大模型,研发端到端自动驾驶系统
Mobileye端到端自动驾驶解决方案的深度解析







 工商网监
工商网监
评论