 端到端数据标注方案在自动驾驶领域的应用优势
端到端数据标注方案在自动驾驶领域的应用优势

随着自动驾驶技术向L3及以上级别快速发展,高质量训练数据的需求呈现指数级增长。传统的数据标注方式面临着效率低下、成本高昂、一致性差等痛点。据统计,一辆L4级自动驾驶汽车每天产生的数据量高达10-20TB,其中需要标注的数据占比超过60%。在这样的背景下,端到端数据标注方案应运而生,正在重塑自动驾驶的数据生产范式。
端到端数据标注方案通过整合采集、清洗、标注、验证全流程,构建自动化、智能化的数据处理闭环。与传统的离散式标注相比,这种方案在效率、质量和成本三个维度都展现出显著优势。
一、端到端数据标注方案的技术架构
1、整体架构设计
端到端数据标注方案的核心在于构建"数据输入-智能处理-结果输出"的完整闭环系统。该系统通常由四个关键模块组成:
(1)多源传感器原始数据采集
支持多种类型传感器的原始数据采集,包括但不限于摄像头、激光雷达(LiDAR)、毫米波雷达、GPS/IMU等。涵盖城市道路、高速公路、复杂天气条件(雨、雪、雾、夜间)等多种驾驶场景,确保数据集的多样性和全面性。
2、时空对齐数据集构建
构建的时空对齐数据集能够真实反映车辆在行驶过程中的周围环境动态变化,为自动驾驶算法提供可靠的训练数据。数据集标注应包含丰富的环境信息,如道路结构、交通标志、行人、车辆、障碍物等,以及它们的动态状态(如位置、速度、方向等)。
3、驾驶行为与车辆操控指令映射标注
驾驶行为标注,包括驾驶员的操控意图(如转向、加速、制动等)以及车辆的实际操控指令(如方向盘转角、油门踏板开度、制动踏板压力等)。通过建立驾驶行为与车辆操控指令之间的精准映射关系,帮助自动驾驶系统学习并模拟人类的驾驶决策过程。同时,标注过程结合驾驶场景上下文信息,确保映射关系的合理性和安全性。
4、数据管理
建立多维度的评估体系,包括一致性检查、交叉验证、抽样审核等机制。通过设定严格的质量标准(如98%以上的标注准确率),确保输出数据满足自动驾驶模型的训练需求。同时支持多种数据格式的输出,便于与主流的自动驾驶开发框架(如Apollo、Autoware)无缝对接。
二、自动驾驶领域的主要标注类型
(1)2D图像标注
在摄像头数据的处理中,2D图像标注是最基础也是最重要的环节。主要包括以下几种类型:
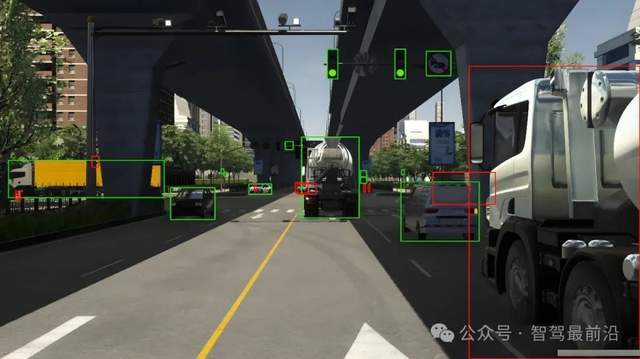
物体检测框标注:对车辆、行人、交通标志等关键目标绘制矩形边界框。要求标注者严格遵循既定规范,如确保框体紧贴目标边缘,避免过度包含背景。
语义分割标注:对图像中的每个像素进行分类,区分道路、人行道、建筑物等不同语义区域。这种细粒度的标注对自动驾驶的环境理解至关重要。
车道线标注:精确标记车道线的位置和类型(实线、虚线、双黄线等)。需要标注者具备专业的交通知识,确保标注结果符合实际道路规则。
特殊场景标注:针对雨雪天气、夜间、逆光等复杂场景进行专项标注。这些场景虽然占比不高,但对自动驾驶系统的鲁棒性测试极为关键。
(2)点云标注
3D立方体标注:在点云数据中标注物体的三维边界框。需要标注者具备空间想象力,准确判断物体在三维空间中的位置和尺寸。
点云分割标注:对每个点进行分类,区分不同物体和背景。由于点云数据稀疏且不均匀,这项工作的难度远高于2D图像分割。
连续帧追踪标注:对动态物体在多帧点云中的运动轨迹进行标注。需要保持物体ID的一致性,为自动驾驶的预测模块提供训练数据。
地面标注:准确识别和标记可行驶区域。这是路径规划的基础,要求标注者对点云中的地面特征有清晰判断。
4D标注:在3D空间的基础上,引入时间维度进行数据标注。通过算法将摄像头采集的 2D 图像转换为上帝视角的俯视图,形成包含空间位置、运动轨迹、速度、加速度等时序信息的四维标注体系。
(3)多模态联合标注
?传感器融合标注:将摄像头图像与激光雷达点云进行关联标注。例如,先在图像中标注车辆,然后在对应的点云数据中标注同一车辆,建立跨模态的对应关系。
时序一致性标注:确保视频序列中同一物体在不同帧的标注保持一致。这对自动驾驶的物体追踪能力训练尤为重要。
?驾驶行为标注:结合车辆CAN总线数据(如方向盘转角、油门刹车信号),标注驾驶员的意图和行为。这类数据对模仿学习和决策规划模型的训练很有价值。
三、端到端方案的应用优势
(1)效率提升
通过AI预标注技术,端到端方案可将人工成本减少60%-80%。例如,在物体检测任务中,算法可以自动生成90%以上的候选框,人工只需进行微调和确认。从数据采集到标注完成的周期缩短为原来的1/3。
(2)质量保障
统一的标注标准和集中化的管理有效解决了不同标注者之间的差异问题。针对自动驾驶的特殊需求,端到端方案内置了交通规则知识库和标注指导系统,帮助标注者做出更专业的判断。多层级的质量检查机制(如算法初检、人工复核、专家抽检)将整体错误率控制在0.5%以内。
(3)成本优化
云端协同的架构使得标注工作可以分布式进行,无需为每个标注团队配置高端工作站,IT基础设施投入减少50%。
(4)可扩展性
云端架构支持从几百到上百万样本的平滑扩展。模块化设计便于快速适配新的标注需求,如当法规要求新增某种交通标志时,可以在24小时内更新标注规范并部署到全系统。
四、典型案例
标贝科技推出端到端自动驾驶系统标注方案。提供从多源传感器原始数据采集到车辆控制指令输出的全链路标注服务,包括时空对齐数据集和驾驶行为与车辆操控指令的映射标注。
借助在自动驾驶数据标注领域拥有丰富的经验,标贝科技深入了解行业需求和技术发展趋势,能够为客户提供定制化的解决方案。广泛应用于自动驾驶算法研发、测试验证、仿真训练等各个环节。
审核编辑 黄宇
-
自动驾驶
+关注
关注
790文章
14364浏览量
171130
发布评论请先 登录
自动驾驶数据标注主要是标注什么?
什么是自动驾驶数据标注?如何好做数据标注?


为什么自动驾驶端到端大模型有黑盒特性?


自动驾驶中基于规则的决策和端到端大模型有何区别?

东风汽车推出端到端自动驾驶开源数据集
端到端在自动泊车的应用




Waymo利用谷歌Gemini大模型,研发端到端自动驾驶系统
Mobileye端到端自动驾驶解决方案的深度解析







 工商网监
工商网监
评论