 Nullmax端到端自动驾驶最新研究成果入选ICCV 2025
Nullmax端到端自动驾驶最新研究成果入选ICCV 2025

近日,国际计算机视觉大会 ICCV 2025 正式公布论文录用结果,Nullmax 感知团队在端到端自动驾驶方向的最新研究成果《HiP-AD: Hierarchical and Multi-Granularity Planning with Deformable Attention for Autonomous Driving in a Single Decoder》成功入选,彰显 Nullmax 在一段式端到端核心技术上的深厚积累与创新实力,尤其在端到端自动驾驶系统设计领域的研究已处于行业领先水平。
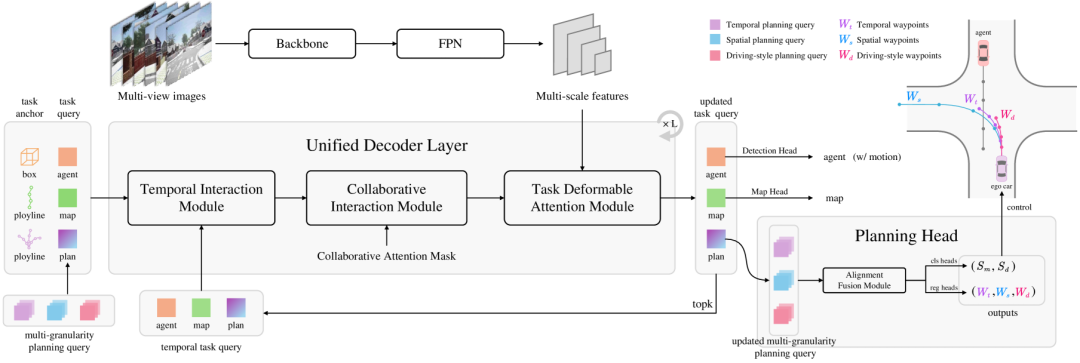
作为全球计算机视觉三大顶会之一,ICCV(International Conference on Computer Vision)由 IEEE 主办,每两年举办一次,汇聚全球学术界与工业界的前沿研究成果。ICCV 2025 共收到 11,239 篇投稿,规模远超往届。最终,共计 2,699 篇论文获录用 ,录取率仅为 24%。在此次Nullmax入选论文中,感知团队提出了一种全新的端到端模型设计方法——HiP-AD(Hierarchical and Multi-GranularityPlanning forAutonomousDriving),通过统一的 Transformer 解码器架构,将感知、预测与规划任务协同整合,实现了端到端闭环控制的整体优化。
具体而言,新方法HiP-AD 的关键突破在于:
01多粒度分层规划查询
融合时序(Temporal)、空间(Spatial)和驾驶风格(Driving-style)三类轨迹 Waypoints,显著提升了轨迹规划的表达力与泛化性。
02可变形注意力机制
模型可精准聚焦于轨迹周边关键区域,更有效地从图像中提取关键特征。
03统一解码器结构
打破模块壁垒,感知-预测-规划任务在同一空间协同优化,使信息流动更加高效。
HiP-AD多轨迹生成机制:
选出“最优路径”,更具“类人”适应力
HiP-AD 在轨迹预测策略上引入了创新性的多轨迹生成机制。区别于仅输出单一路径的传统方法,它能从时间、空间与驾驶风格等多个维度生成多条候选轨迹,并通过系统综合评估选出最优路径。这一策略显著增强了系统面对动态环境变化时的适应能力,提高了复杂驾驶场景下的稳定性与安全性。
HiP-AD 闭环能力:
真实模型可执行,跑得稳,更可靠
在复杂的实际驾驶环境中,自动驾驶系统常出现“看得懂、想得好,但跑不稳”的问题,即轨迹预测结果看似合理却难以真实执行。原因在于多数传统模型依赖开环测试,仅基于历史数据比对预测轨迹与实际轨迹,缺乏执行层验证。
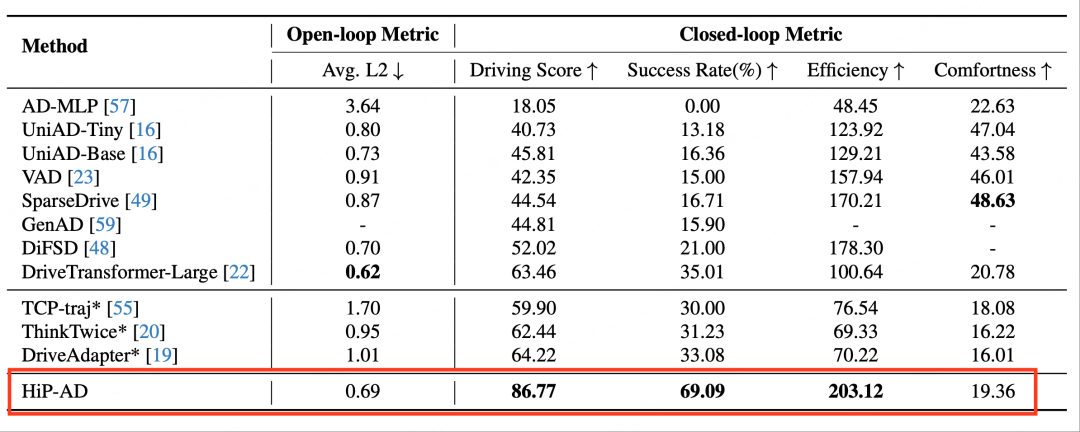
HiP-AD 所采用的闭环设计模式,则要求系统控制车辆在复杂环境中完成驾驶任务,能有效应对如障碍物规避、合理变道与突发情况处理等挑战,全面评估模型的执行与决策能力。
在权威闭环评测基准 Bench2Drive 中,HiP-AD 取得了 SOTA (第一名)的优异成绩,大幅领先同等架构设计,验证了其在真实应用中的执行能力与系统可靠性。
赋能 Nullmax 端到端技术
HiP-AD 助力自动驾驶大脑进化
以加速移动出行智变为目标,Nullmax 多年来擅长将前沿科研成果高效转化为可商业化、规模化落地的技术应用。在实际应用中,HiP-AD 将为 Nullmax Intelligence(Nullmax 于 2024 年发布的新一代端到端自动驾驶技术)注入更强大、拟人且精准的决策与路径规划能力。
接下来,新方法HiP-AD 有望显著增强 Nullmax Intelligence 在城市、高速等复杂场景下的环境理解与自主决策能力,全面提升Nullmax辅助驾驶系列方案的智能化水平与用户体验。
结语
一直以来,Nullmax 专注于打造以纯视觉为核心的平台化辅助驾驶方案。在前沿技术引领方面,Nullmax团队研究成果已多次入选国际顶会 CVPR、ECCV 与 ICCV,研究方向覆盖自动驾驶的视觉感知、规划决策、端到端系统等核心技术路径。与此同时,Nullmax 始终坚持科研技术与量产落地并重,持续推动创新成果从学术层面走向产品应用。
在自动驾驶技术快速演进的今天,我们欢迎有志于推动行业进步的优秀人才加入 Nullmax,点击下方“阅读原文”查看岗位详情,一起智变未来吧!
-
解码器
+关注
关注
9文章
1190浏览量
42081 -
计算机
+关注
关注
19文章
7679浏览量
90993 -
自动驾驶
+关注
关注
790文章
14364浏览量
171126
原文标题:Nullmax 论文入选 ICCV 2025!HiP-AD 提出一段式端到端模型设计新方法
文章出处:【微信号:Nullmax,微信公众号:Nullmax纽劢】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为什么自动驾驶端到端大模型有黑盒特性?

理想汽车八篇论文入选ICCV 2025
端到端数据标注方案在自动驾驶领域的应用优势


自动驾驶中基于规则的决策和端到端大模型有何区别?

东风汽车推出端到端自动驾驶开源数据集
动量感知规划的端到端自动驾驶框架MomAD解析

DiffusionDrive首次在端到端自动驾驶中引入扩散模型

端到端在自动泊车的应用


Waymo利用谷歌Gemini大模型,研发端到端自动驾驶系统
Mobileye端到端自动驾驶解决方案的深度解析







 工商网监
工商网监
评论