 机器人也要上大模型?英飞凌、ADI宣布跟进
机器人也要上大模型?英飞凌、ADI宣布跟进

近日,NVIDIA(英伟达)在官方博客公布了新一代边缘计算平台 Jetson Thor,专门面向通用机器人应用。
英伟达Jetson Thor采用NVIDIA Blackwell GPU提供高达2,070 FP4 TFLOPS的AI计算能力;运算中心功耗也跃升至40–130W区间,其中开发者套件运行在130W功耗范围内。

图/英伟达官网
伴随128 GB LPDDR5X内存的升级,这使英伟达Thor更适合在设备端并行处理多路高速传感数据,并支持生成式/基础模型推理,满足更苛刻的实时机器人应用需求。
值得注意的是,多家合作厂商出现在英伟达的生态名单中。其中,ADI(亚德诺半导体)、Infineon(英飞凌)两家元器件合作商相继发布合作公告,明确将与英伟达共同开发基于Jetson Thor的机器人感知、控制与电源架构。
01 动态场景下的实时性瓶颈
从人形机器人的行走与姿态保持,到手术辅助机器人、配送与工业机器人,再延伸至农业、物流机器人和自主系统机器人,这些机器人应用场景的共同特点是:机器人必须在动态环境中同时处理多路感知输入,并在极短时间内完成决策与执行。对机器人感知—规划—控制链路的时延、抖动和并发稳定性提出了远高于传统工业控制机器人的要求。
图/英伟达官网
然而,现有机器人架构难以支撑这种复杂度。传统机器人模式通常依赖“云端推理 + 设备端轻载”:各类传感器数据经过局部控制器或多级MCU预处理,再上传至中央单元甚至回传云端,最后再下发执行指令。这种层级化架构带来三个突出问题:
闭环时延:多级链路和跨模块传输不可避免地产生延迟和抖动,机器人执行端动作被放大,尤其在步态控制、力控或视觉伺服等任务中,极易造成动作不稳。
并发与隔离不足:多路传感器数据和代理式任务需要并行运行,但分散式算力无法保障资源隔离,容易出现争抢和掉帧,直接影响机器人轨迹精度与抓取质量。
带宽与容量瓶颈:多模态输入不断推高I/O与内存需求,若硬件承载力不足,只能削弱或降级模型,导致策略与动作质量下降,无法支撑复杂机器人人机协作。
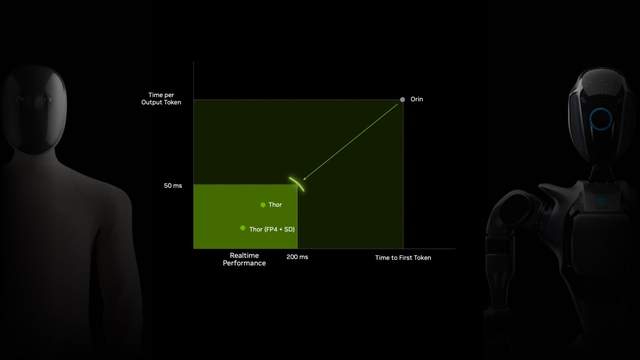
英伟达指出过往工作流“因速度过慢,无法在动态真实环境中运行”,因此新平台定位为在设备端运行更大模型、支持多任务并发的实时推理,并展示了人形机器人与移动平台在多传感并发与本地高吞吐处理下的应用场景。
02 集中化架构重构,“感知—推理—输出”链路
为了解决机器人实时性和并发性的矛盾,英伟达在官方博客和发布视频中给出了Jetson Thor的的架构要点。新架构的变化不仅体现在算力提升,而是对机器人“传感—推理—输出”整条链路的集中化与重构。
在机器人传统方案中,摄像头、雷达、IMU 等多源传感器数据通常由各自的低功耗MCU进行预处理,再经由总线传输至中央模组,由GPU或CPU进行融合与推理。多层路径和跨模块通信不可避免地引入延迟和抖动。
图/英伟达官网
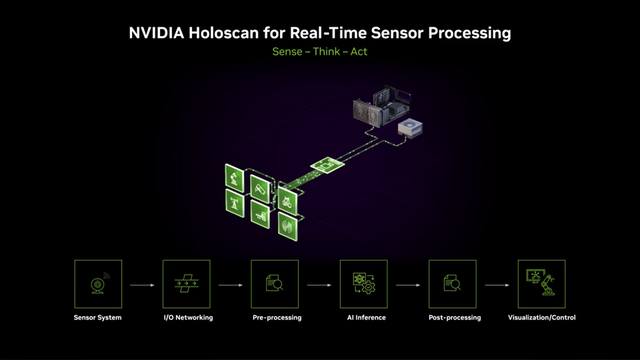
而在英伟达Jetson Thor架构中,路径被重新整合为三段:
输入端:通过Holoscan Sensor Bridge,多模态传感数据可直接进入GPU/CPU内存,以低延迟完成时间同步。这使Thor能够承载更复杂的多传感并发任务。
计算端:集中推理与多任务隔离。中央SoC基于Blackwell GPU和14核Arm CPU,最高支持128GB内存,并具备MIG(多实例 GPU)功能,可在同一平台上隔离并行运行机器人视觉、语言、规划等任务。
输出端:提供了丰富硬件接口,包括高速以太网(4×25 GbE等)与其他I/O选项。这使得执行层的控制单元、传感器与Thor算力中心间能够保持高速、低延迟的数据交换。
英伟达表示除人形机器人外,Jetson Thor还将为各类机器人应用提速,包括手术辅助机器人、智能牵引车、配送机器人、工业机械臂及视觉AI智能体等,能在边缘端为规模更大、复杂度更高的AI模型提供实时推理能力。
03 生态协同,ADI 与英飞凌的适配切入
英伟达发布Jetson Thor平台后,ADI和英飞凌相继官宣合作,前者把边缘感知、精密运动控制、电源完整性与确定性连接对接至英伟达Jetson Thor及其工具链,后者从人形机器人中的运动与效率场景切入,加入该生态。
亚德诺(ADI):从传感到仿真的闭环适配
ADI表示,将把完整的机器人技术栈与英伟达Jetson Thor平台深度集成,覆盖 边缘感知、精密运动控制、电源完整性和确定性连接 等关键环节。
多模态传感:提供ToF深度摄像头、高精度IMU、关节编码器和多轴力/扭矩传感器,为Thor的感知层输入高保真数据,增强模型训练与实时推理的物理准确性。
精密运动与电源:通过多圈磁编码器与电流/扭矩闭环控制,实现高精度驱动,并以电源完整性为核心保障,使机器人在高功率条件下仍能稳定运行。
确定性连接:借助Holoscan Sensor Bridge与JetPack 7,将传感器和执行器数据以可控延迟直通Thor的GPU/CPU;结合高速互联技术,在机器人手部、手臂、躯干和感知节点间实现时间对齐的数据融合,确保“感知—推理—动作”闭环的同步性与低延迟。
仿真建模:将传感器与执行器建模到Isaac Sim数字孪生环境中,使算法先在虚拟环境中完成训练,再无缝迁移到实机运行,从而显著缩短机器人开发迭代周期。
通过这一整套方案,ADI不仅在硬件传感和电源链路上与英伟达Thor平台对接,还在工具链、连接与仿真闭环上完成了适配,为机器人厂商提供了更快、更确定的开发路径。
英飞凌:安全高效的运动控制赋能机器人
另一边,英飞凌也瞄准了英伟达Jetson Thor在人形机器人上的巨大潜力,宣布携手英伟达提供精准运动与高效电机控制解决方案。
英飞凌在新闻稿中表示,将把其在机器人功率、微控制器、传感与连接领域的完整产品组合,与Jetson Thor平台深度集成,重点面向人形机器人等复杂运动系统的需求。
在机器人控制单元层面,AURIX?与PSOC?系列MCU具备多核实时处理和功能安全特性,广泛应用于汽车安全系统,如今被用于机器人关节和传感器节点的确定性控制。这一经验迁移,使机器人能够在高实时和高可靠条件下保持稳定动作。
在机器人电机控制方面,英飞凌推出的PSOC? Control C3系列MCU已与NVIDIA Holoscan平台实现对接,可直接连接Jetson Thor模块,完成机器人从传感到执行的实时闭环控制。其内置的FOC(磁场定向控制)算法,能够显著降低电机驱动噪声,提升扭矩输出稳定性和运动精度。
在机器人功率与通信层面,英飞凌提供基于GaN的电机驱动开关、高性能栅极驱动器与电流传感器,兼顾高功率密度与高效率。同时,凭借收购Marvell汽车以太网业务而推出的Brightlane?千兆以太网系列,为机器人内部构建高速、低延迟的通信骨干,使Jetson Thor与各节点间保持时间对齐与高带宽的数据交互。
英飞凌CEO Jochen Hanebeck表示:“凭借我们在功率开关、微控制器、传感与连接方面的技术积累,我们能够帮助机器人实现感知、移动、执行与连接,并确保其安全可靠运行。”
通过这一方案,英飞凌将运动控制的安全性与能效引入Jetson Thor架构,为人形机器人和复杂自主系统的落地提供了完整的支撑路径。
04 机器人架构演进对元器件的新要求
随着应用场景复杂度提高,可以看到机器人必须在设备端完成高吞吐、多模态、低时延的实时推理已经成为未来趋势。这一变化,对上游元器件厂商提出了新的适配要求。
首先,传感与接口必须满足高带宽与严格的时间同步。多路传感数据直通GPU/CPU,要求机器人传感器和接口器件在硬件层面具备精准时间戳和低延迟传输能力,否则将成为闭环瓶颈。
其次,控制与执行需要在集中算力架构下实现更快的响应。Jetson Thor通过MIG提供多任务隔离,并配合高速互联接口,使感知、推理结果能够低延迟传递至机器人控制和执行环节。这要求相关元器件在响应速度与安全性上满足更高标准。
第三,电源与能效管理的重要性显著提升。随着大模型和多任务在设备端成为常态,运算中心正从几十瓦级迈向百瓦级,对机器人电源链路的功率密度、效率与完整性提出了更高要求。元器件厂商必须确保在高功率波动下仍能稳定供电,避免局部不稳拖垮整体推理。
以英伟达Jetson Thor为例,机器人“上大模型”是一场跨越算力、传感、驱动与电源的系统协同。这些变化正在重塑对元器件的适配逻辑,也为上游厂商提供了新的观察坐标。
本文为哔哥哔特资讯原创文章,未经允许和授权,不得转载
审核编辑 黄宇
-
英飞凌
+关注
关注
68文章
2386浏览量
141292 -
电源
+关注
关注
185文章
18503浏览量
258287 -
机器人
+关注
关注
213文章
30091浏览量
215557 -
大模型
+关注
关注
2文章
3293浏览量
4396
发布评论请先 登录
ADI安全产品如何简化不同机器人控制系统中安全机制的实现

工业机器人的特点
ADI人形机器人的“感觉神经 + 电力神经元”核心芯片方案盘点
盘点#机器人开发平台
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
ADI 机器人芯片解决方案分析
普渡机器人接入DeepSeek满血版模型
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】1.全书概览与第一章学习
《具身智能机器人系统》第7-9章阅读心得之具身智能机器人与大模型
构建语音控制机器人 - 线性模型和机器学习






 工商网监
工商网监
评论