 开疆智能Profient转EtherCAT网关连接Copley Controls数字驱动器模块配置案例
开疆智能Profient转EtherCAT网关连接Copley Controls数字驱动器模块配置案例

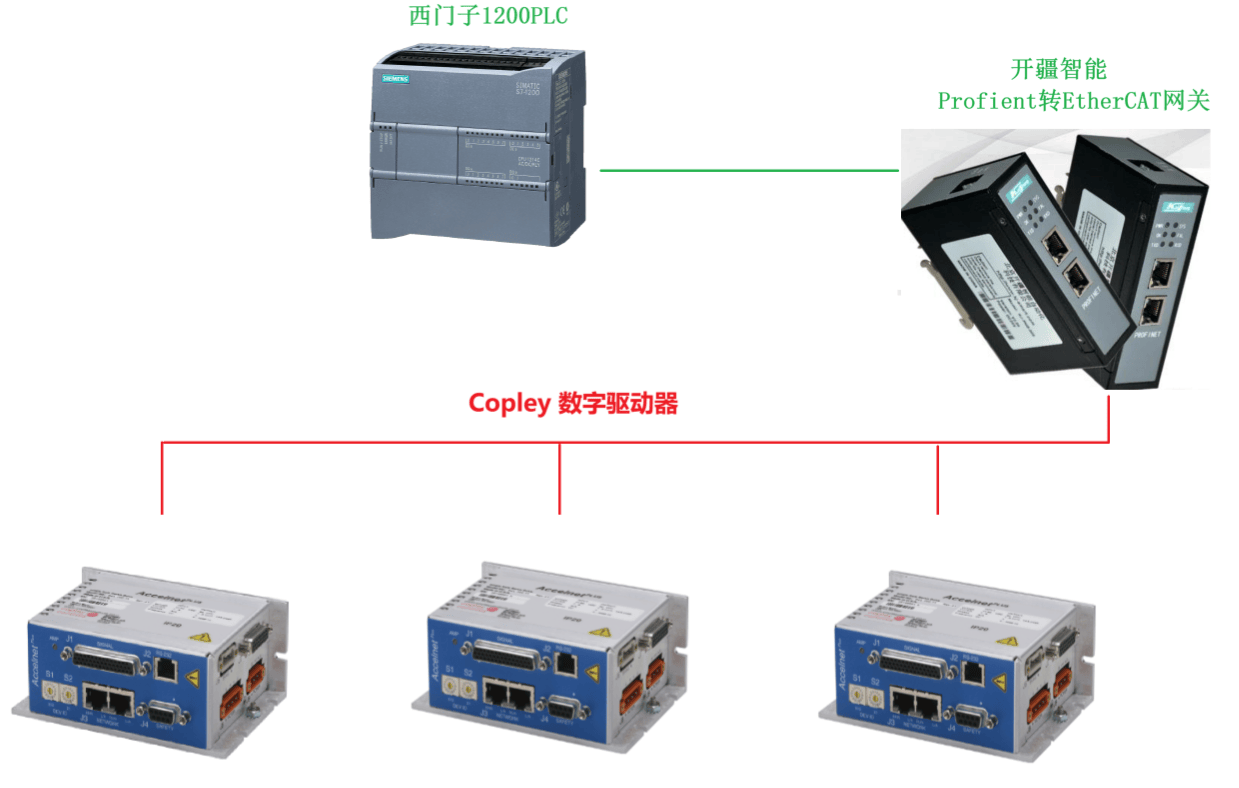
本案例是通过Profient转EthereCAT网关将数字驱动器的EthereCAT协议接入到西门子1200PLC的Profinet协议中,以达到用PLC控制驱动器数据读写的作用。
配置过程
网关配置:
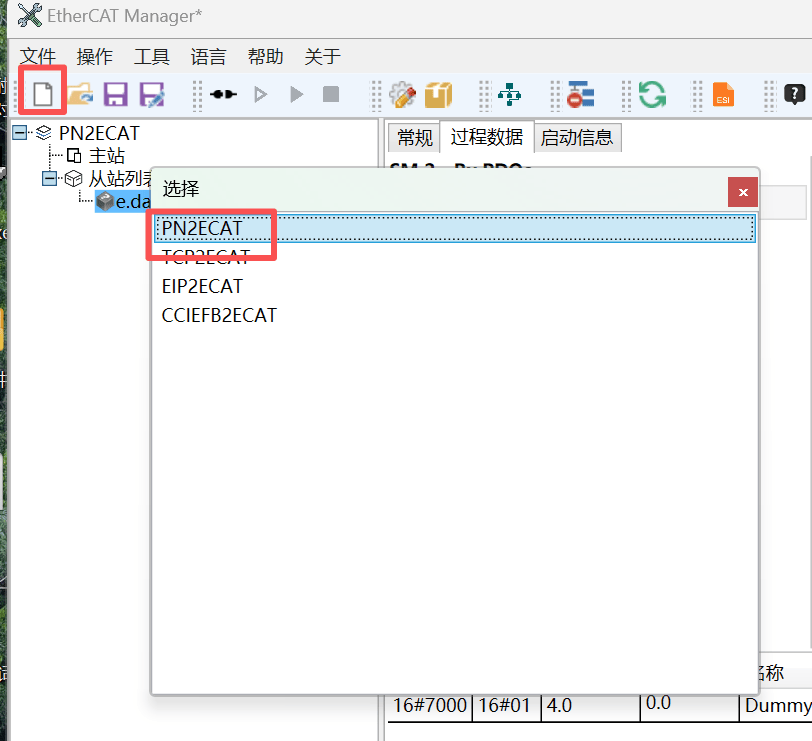
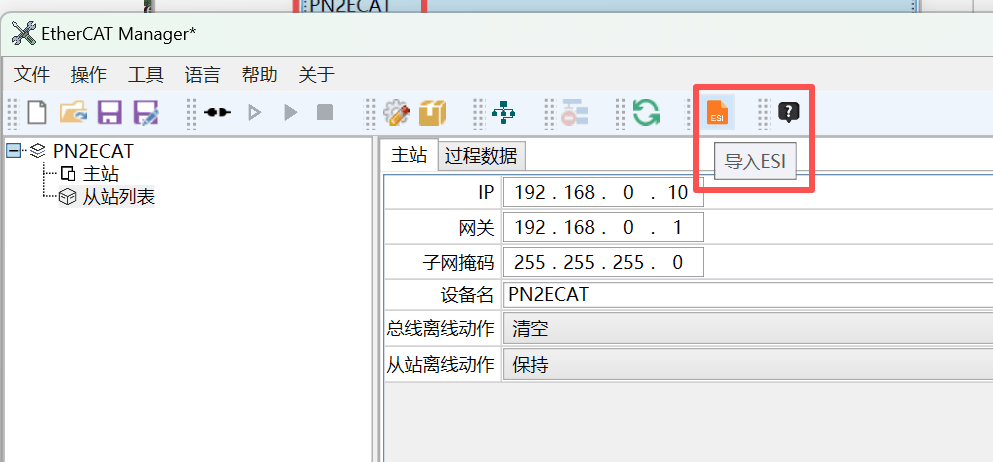
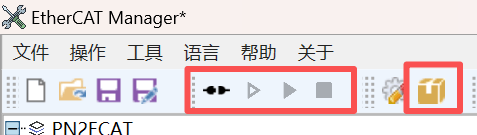
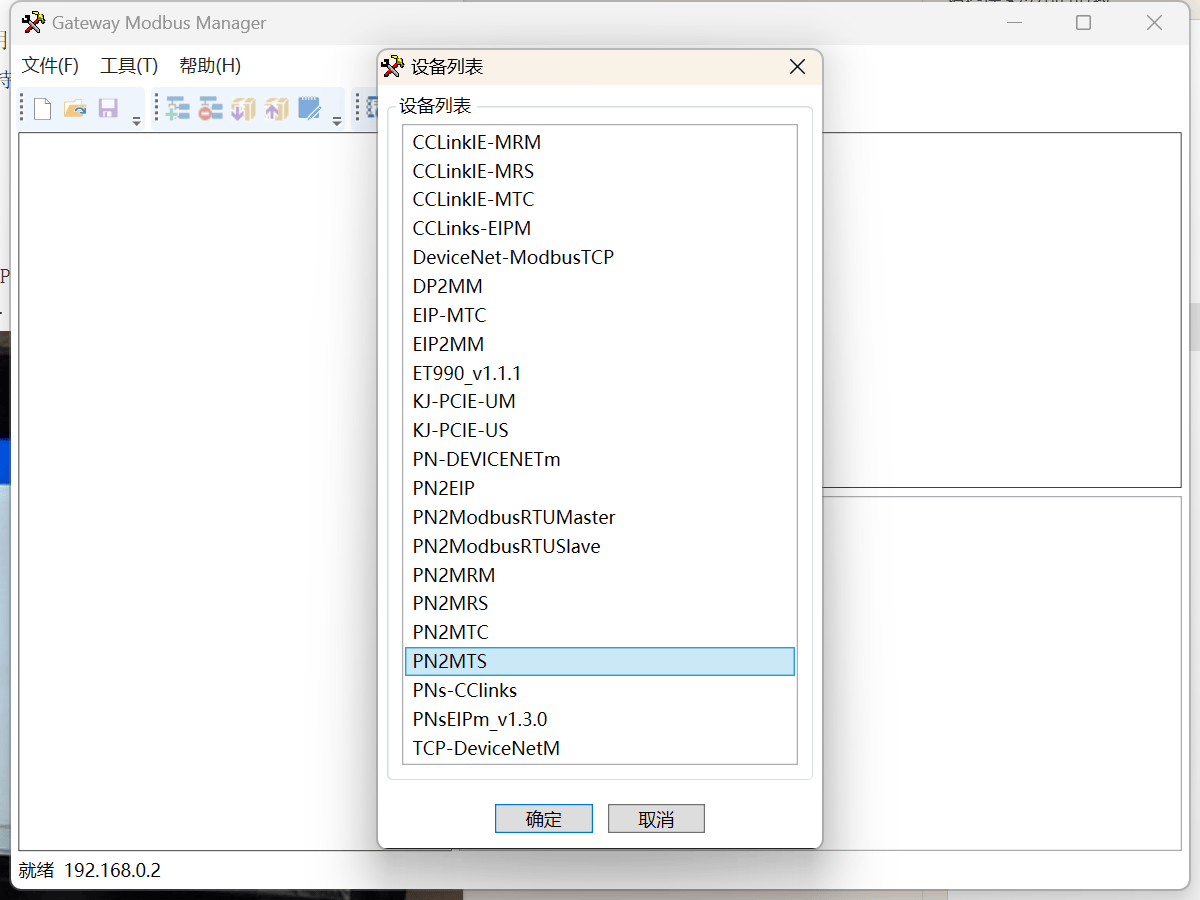
打开网关配置软件“EtherCAT Manager”并新建项目。根据不通网关型号也可选择ModbusTCP,Ethernet或者CCLINKIE等,这里选择PN2ECAT
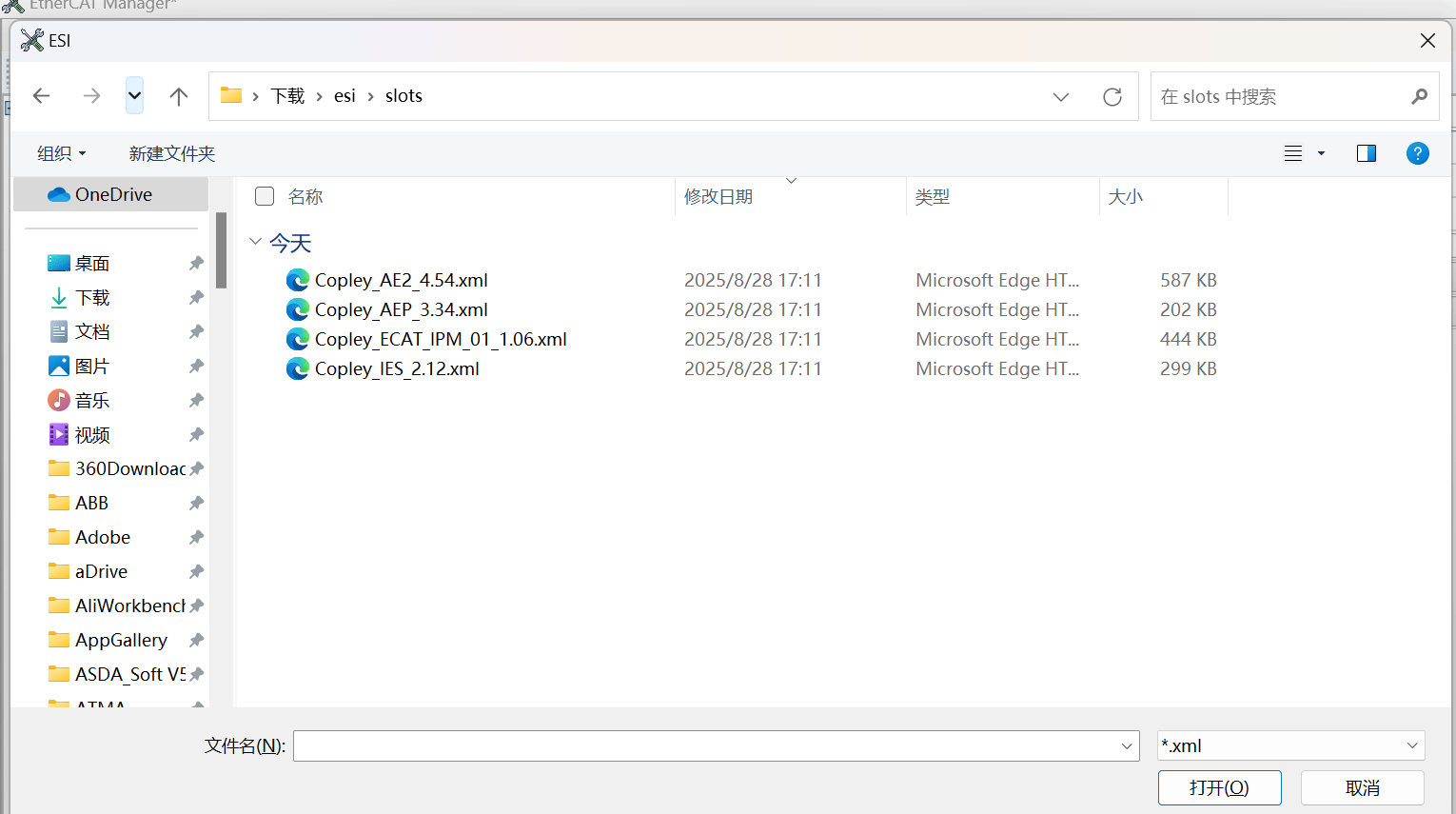
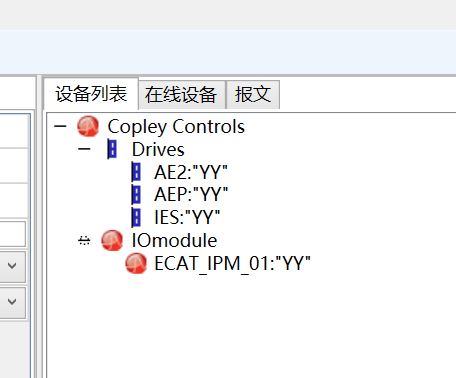
将伺服驱动器的ESI文件导入进网关配置软件,将从站设备添加进网关配置。
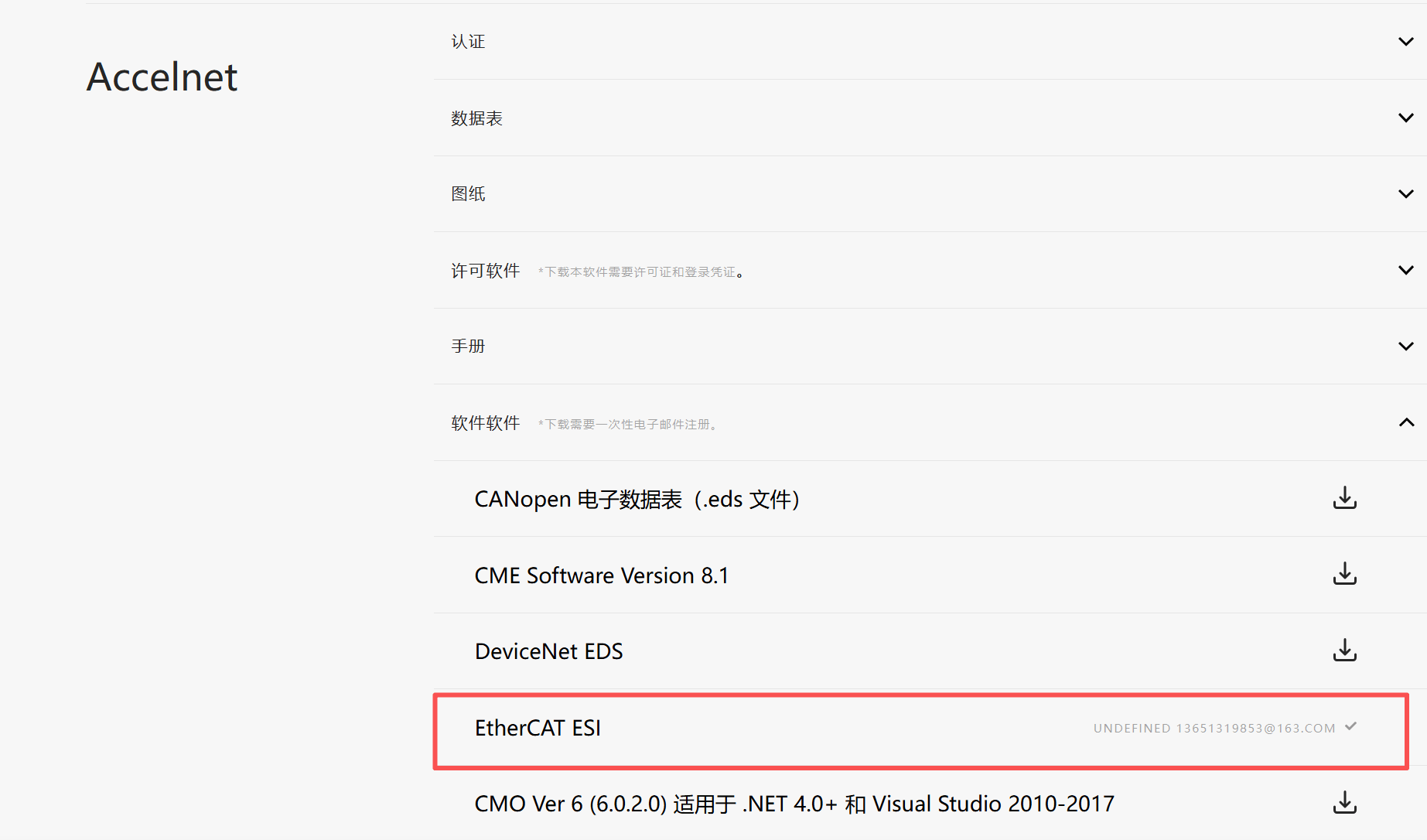
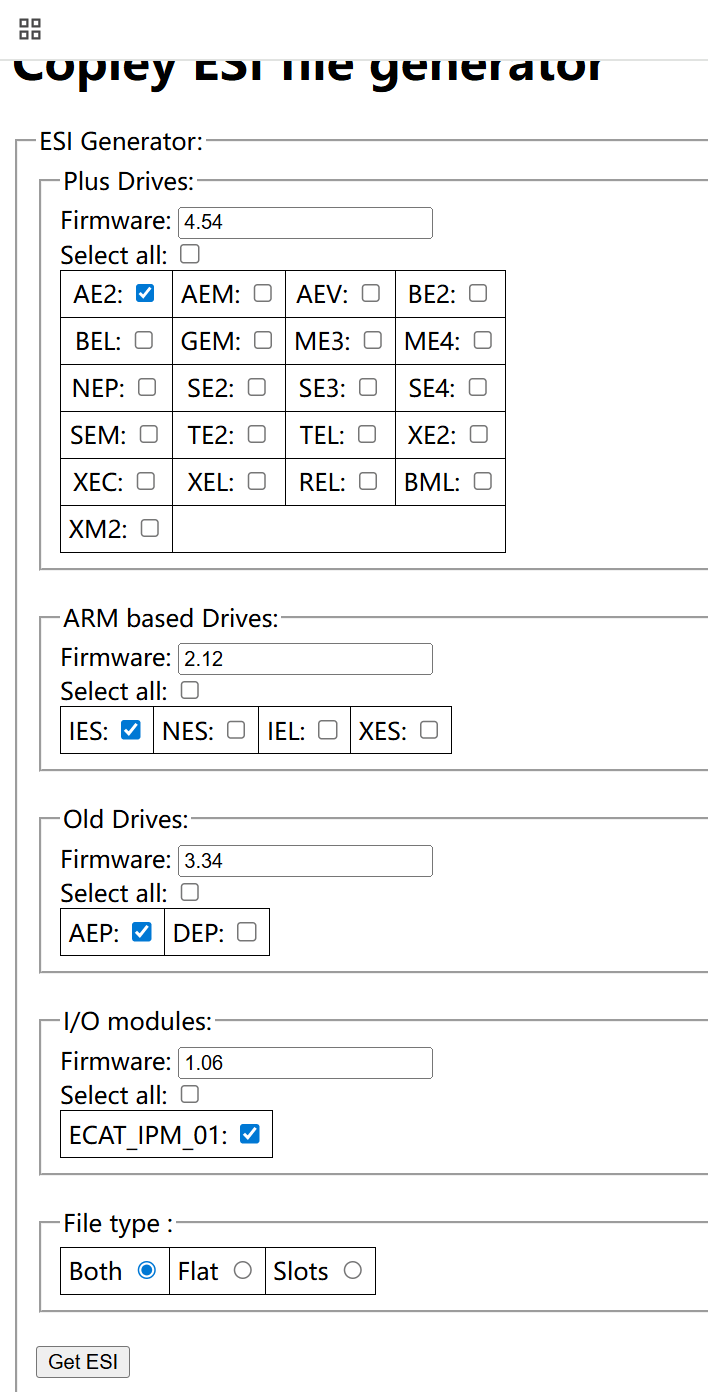
打开发送的型号选择网址,根据需求生成对应的ESL文件
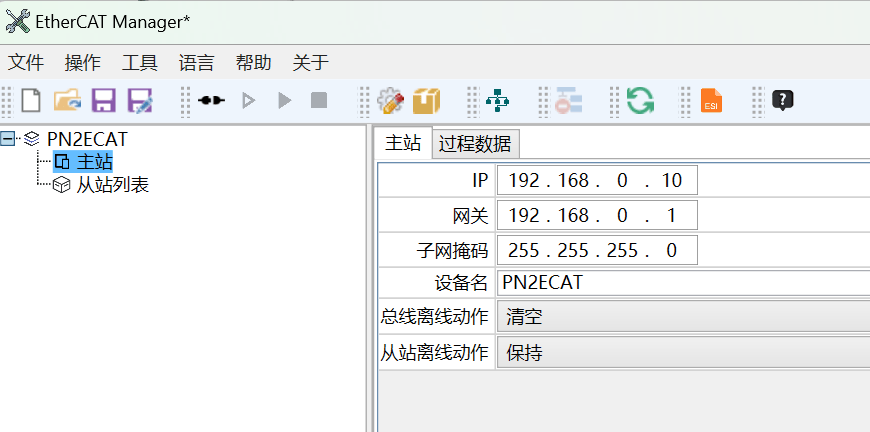
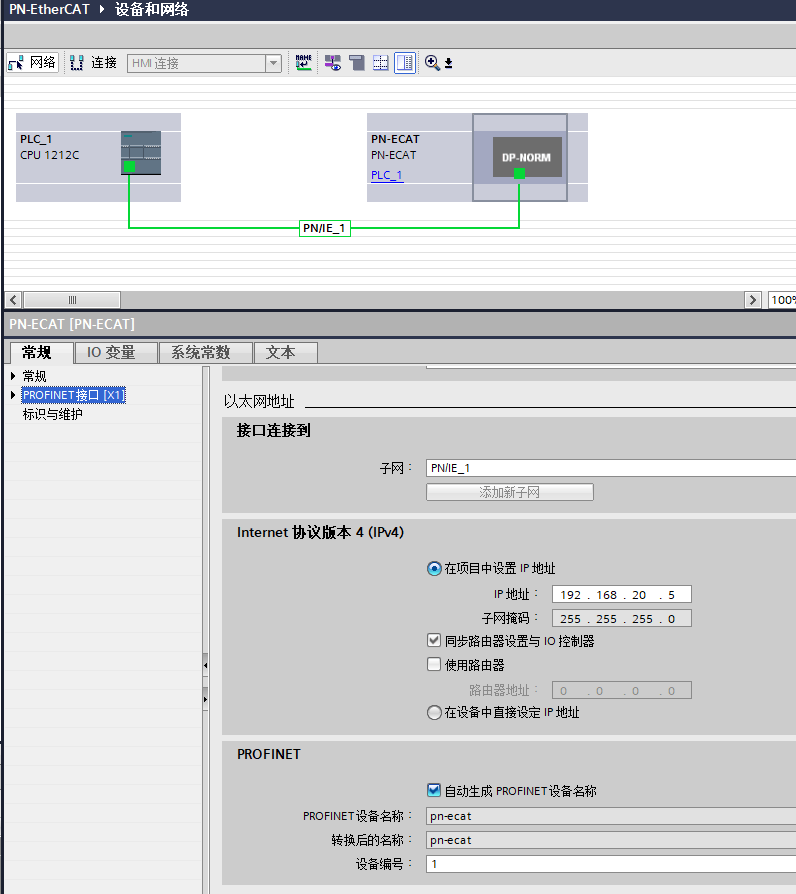
设置网关在Profient一侧的设备名称以及IP地址。(与PLC组态保持一致)
添加从站设备进网关组态。确定型号与选项对应。
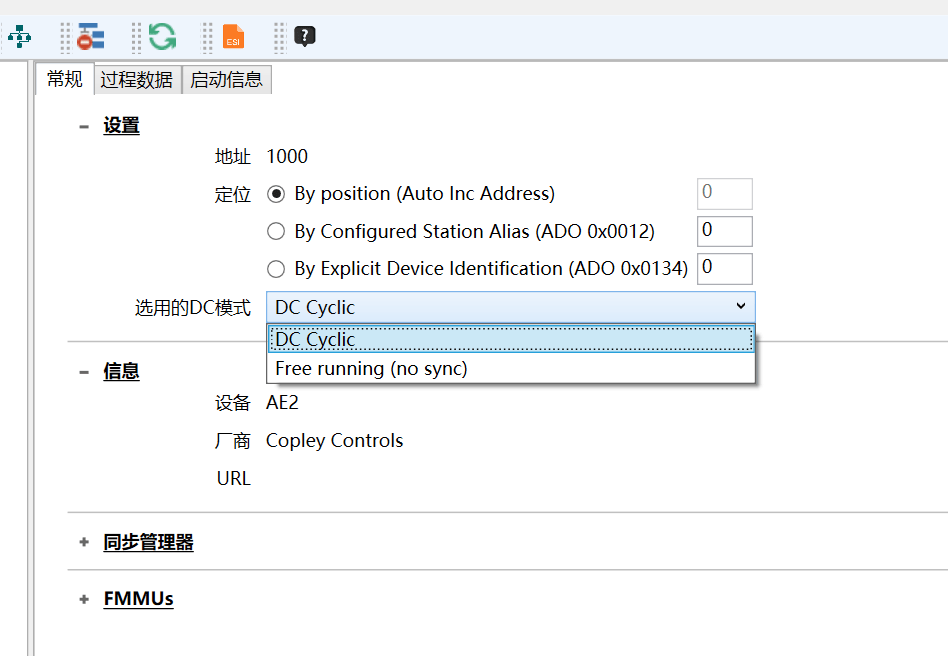
设置好从站的设备地址分配模式,一般默认按连接顺序分配即可即可
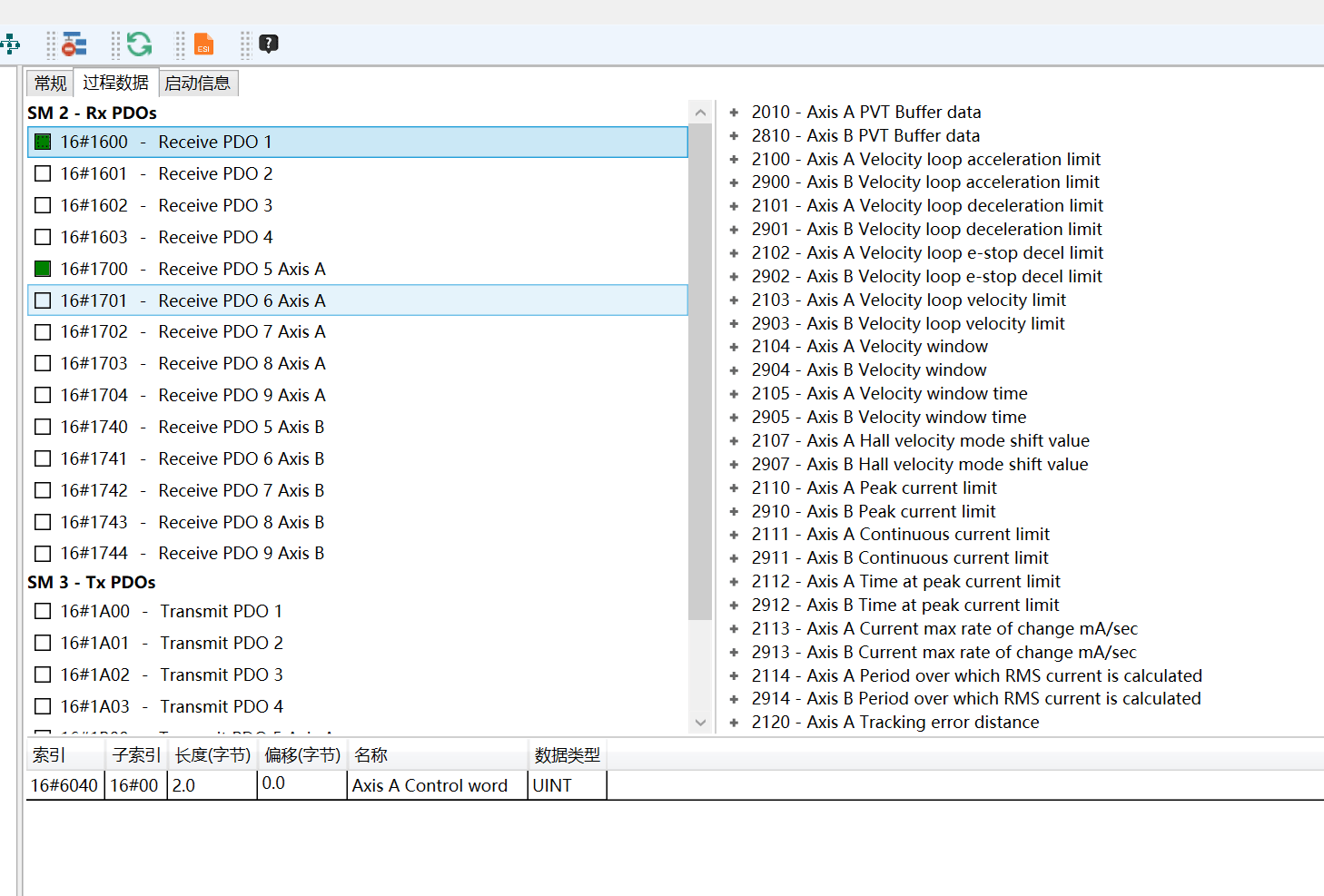
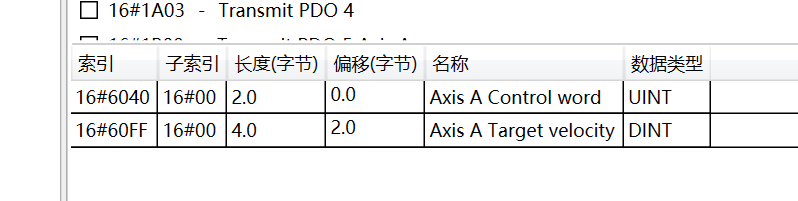
配置过程数据,勾选PDO在下方右键点击添加任意,添加需要用到的参数索引。PDO分为RPDO与TPDO对应网关的输出和输入
将配置下载进网关,点击生成-然后依次点击连接预运行-运行
点击生成后确认通道偏移已经设置
到此网关配置完成。
PLC配置
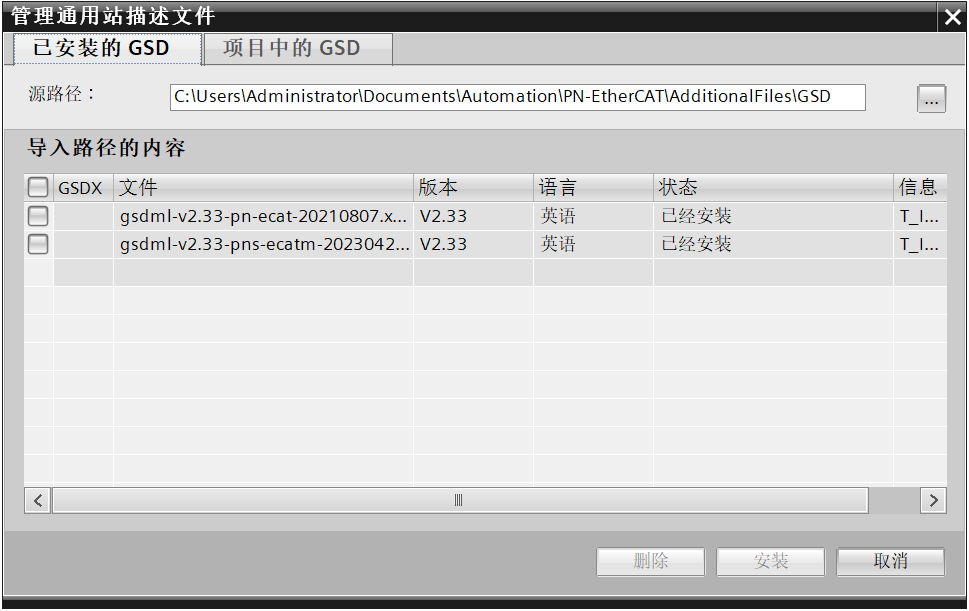
打开PLC组态软件,新建项目并导入网关GSD文件。
导入网关GSD文件后填写设备名称及IP地址。
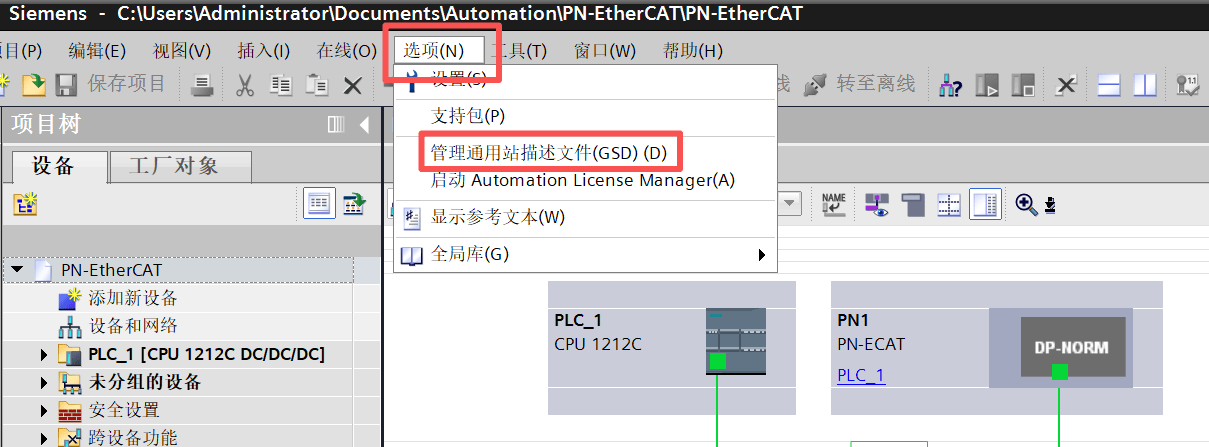
点击选择-管理通用站描述文件(GSD)
安装好GSD文件添加设备到组态。(注意检查GSD文件名称,如不规范会导致安装不成功)
设置好数据的输入输出长度。
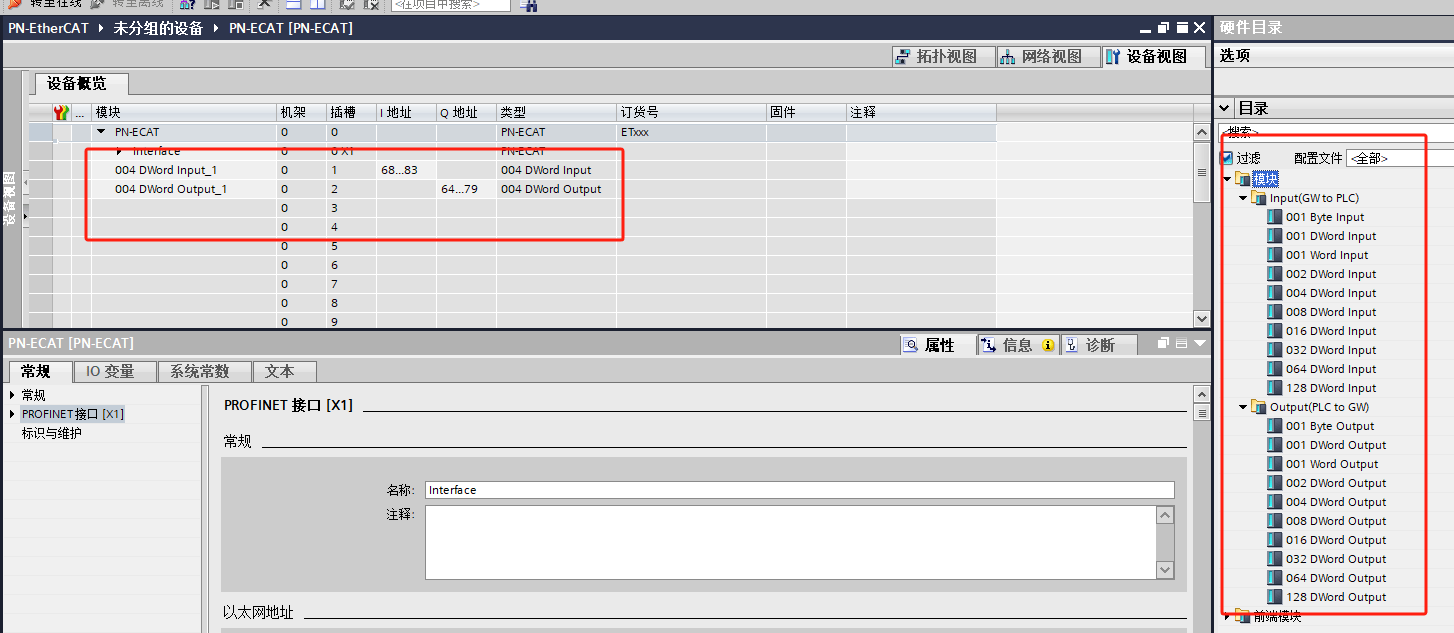
到此网关全部设置完成。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
网关
+关注
关注
9文章
6029浏览量
53935 -
ethercat
+关注
关注
19文章
1214浏览量
40626 -
数字驱动器
+关注
关注
1文章
3浏览量
2397
发布评论请先 登录
相关推荐
热点推荐
开疆智能Profinet转Modbus网关连接DINGS鼎智驱动器配置案例
本案例是PLC通过对Profient转Modbus网关对驱动器进行读写控制,网关通过Modbus协议采集

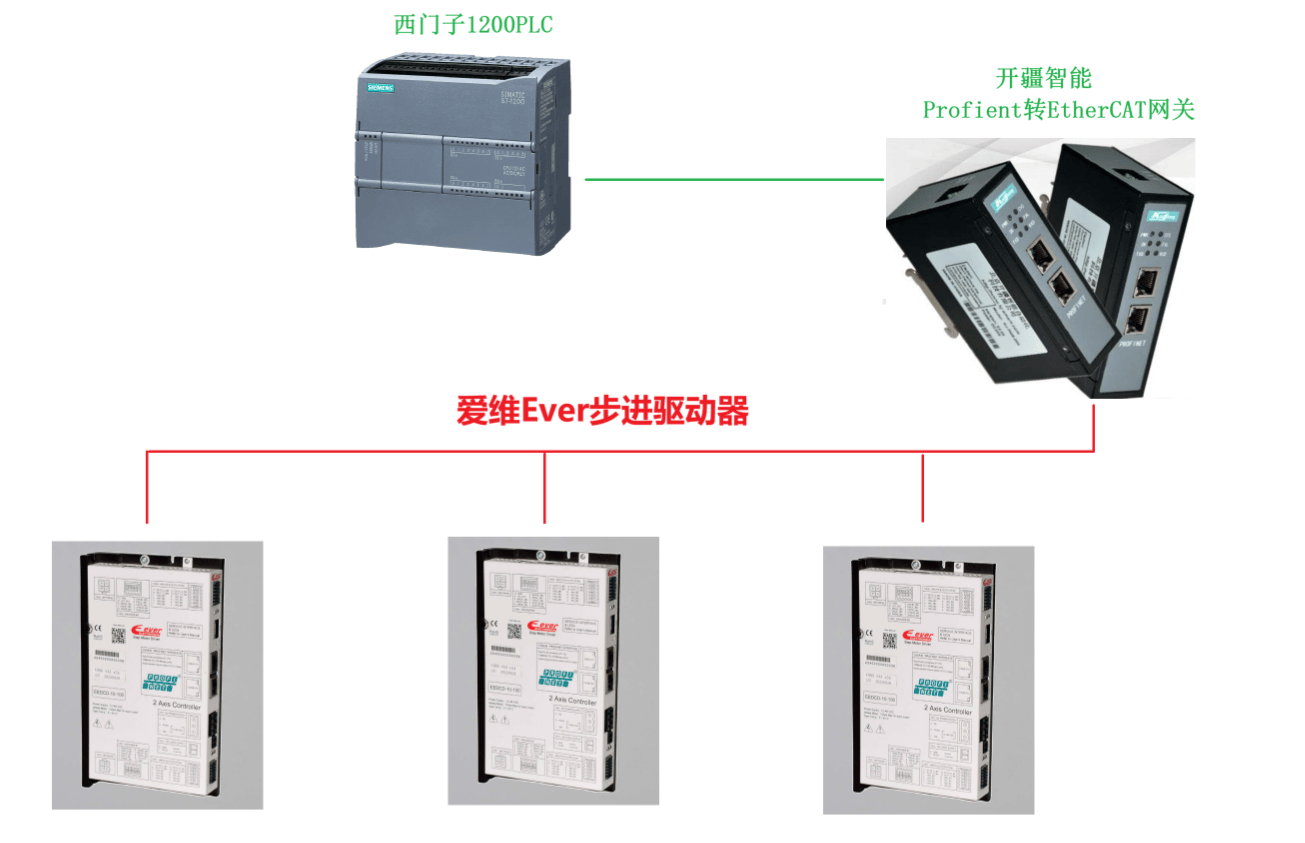
开疆智能Profient转EtherCAT网关连接Ever步进驱动器配置案例
本案例是通过网关将Ever步进驱动器的EtherCAT协议转成西门子PLC使用的Profinet协议,以便用于PLC控制驱动器进行动作。 配置
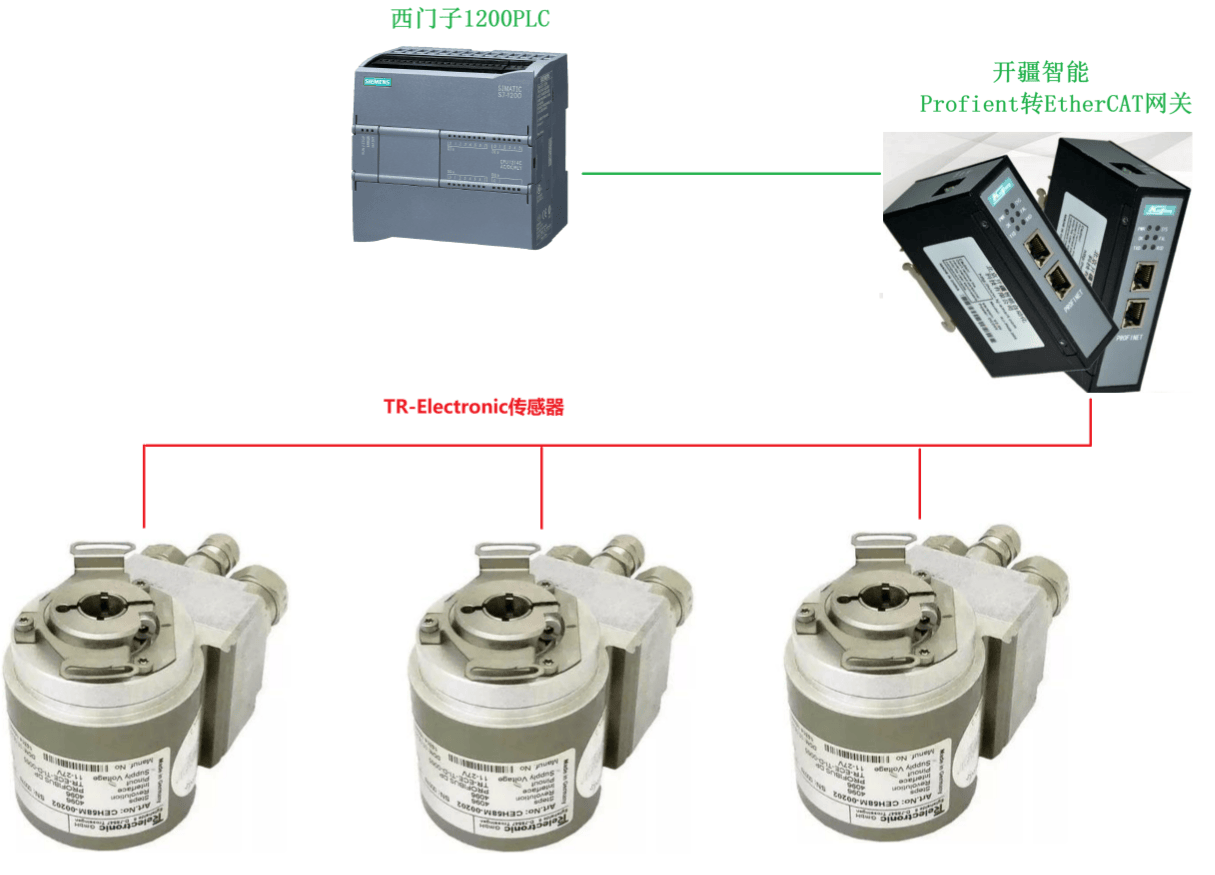
开疆智能Profinet转EtherCAT网关连接TR-Electronic传感器配置案例
本案例是通过开疆智能研发的Profinet转EtherCAT网关将传感器数据传送到PLC,由于两
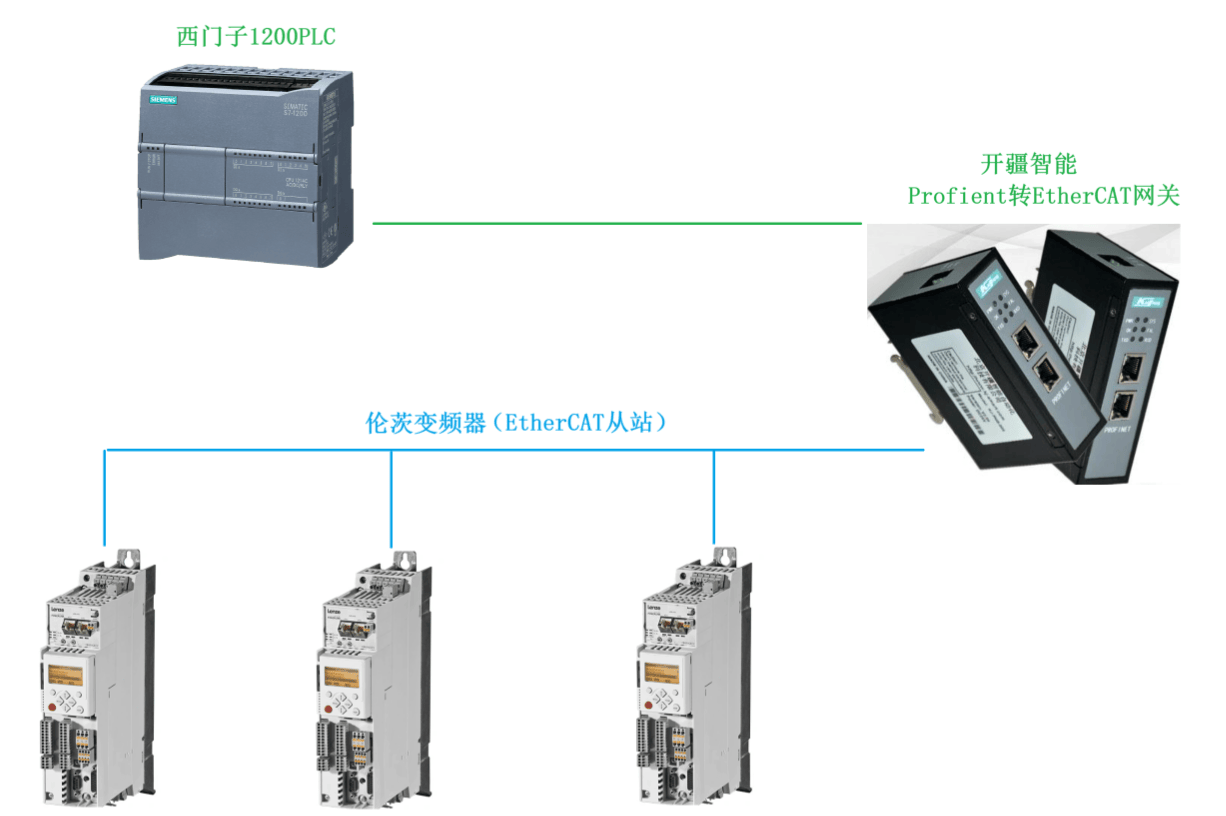
开疆智能Profient转EtherCAT网关连接伦茨变频器配置案例
本案例是西门子PLC通过Profient转EtherCAT网关连接变频器的配置案例,变频
开疆智能Profient转EtherCAT网关连接甘纳数据采集模块配置案例
本案例是西门子PLC通过Profient转EtherCAT网关连接甘纳数采模块的配置案例数采

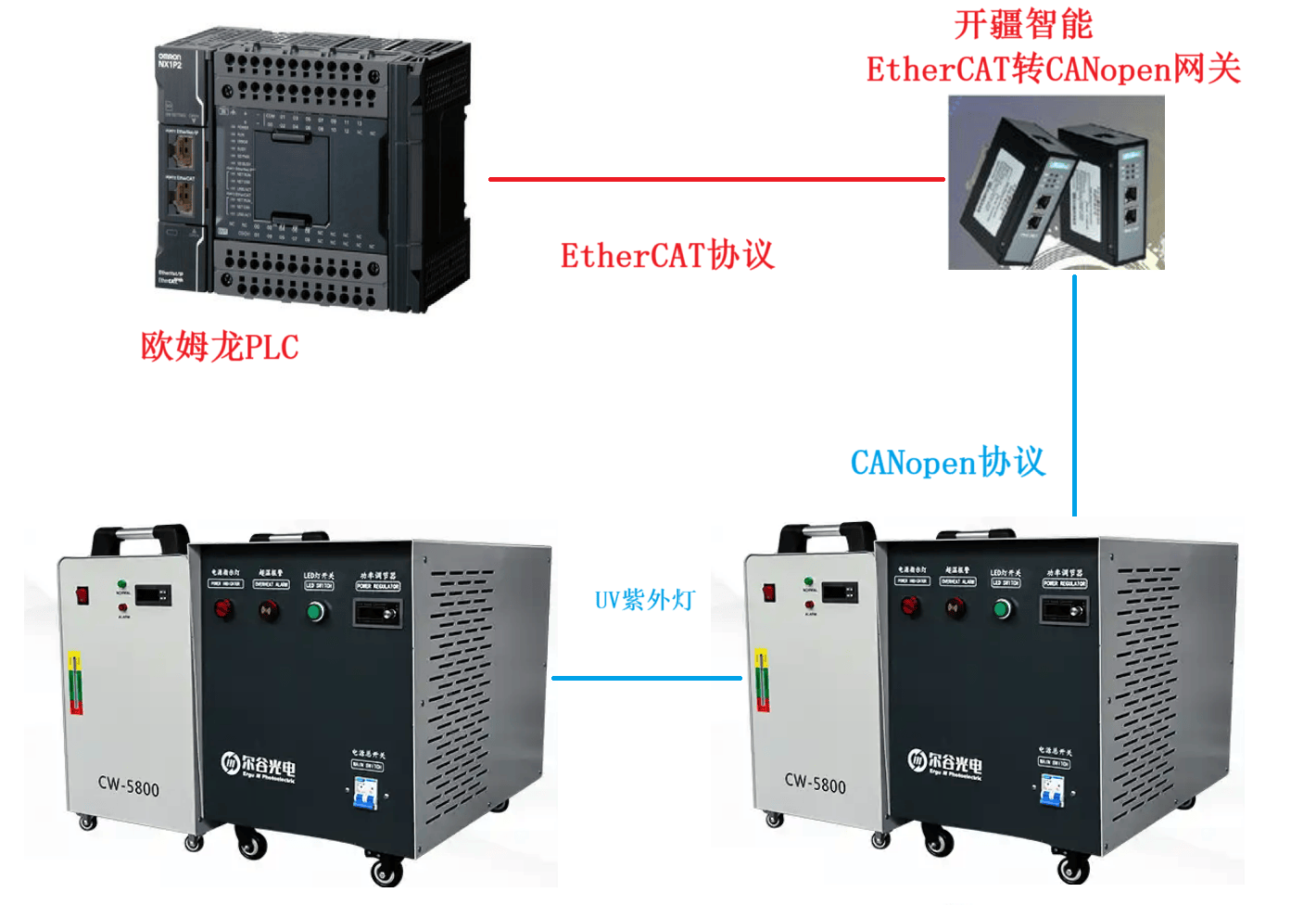
开疆智能EtherCAT转CANopen网关连接UV灯配置案例
本案例是欧姆龙PLC通过开疆智能EtherCAT转CANopen网关连接UV紫外灯的配置案例,紫
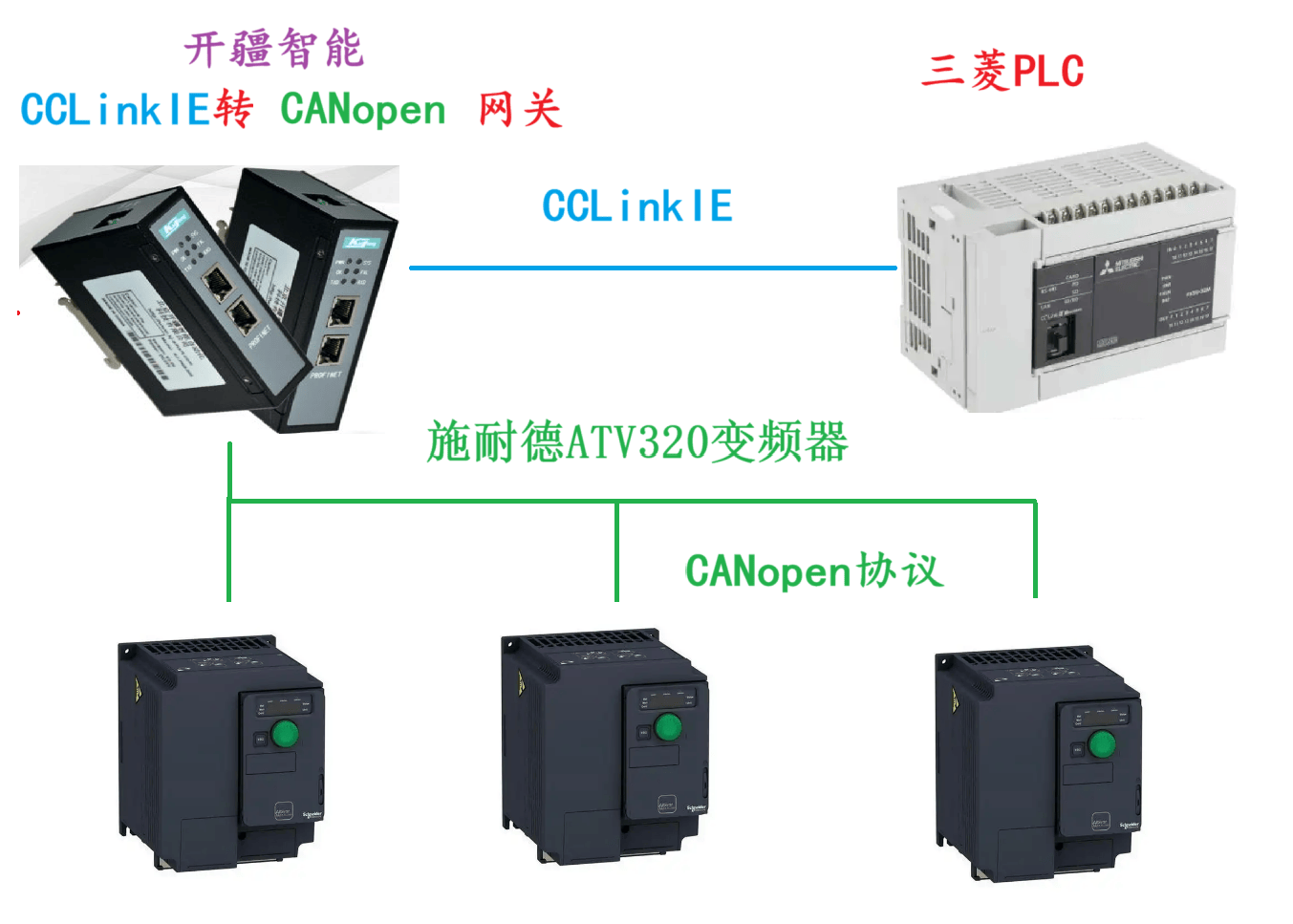
开疆智能CCLinkIE转CANopen网关连接施耐德变频器配置案例
本案例是通过开疆智能研发的CCLinkIE转CANopen网关连接三菱PLC与施耐德ATV变频器。
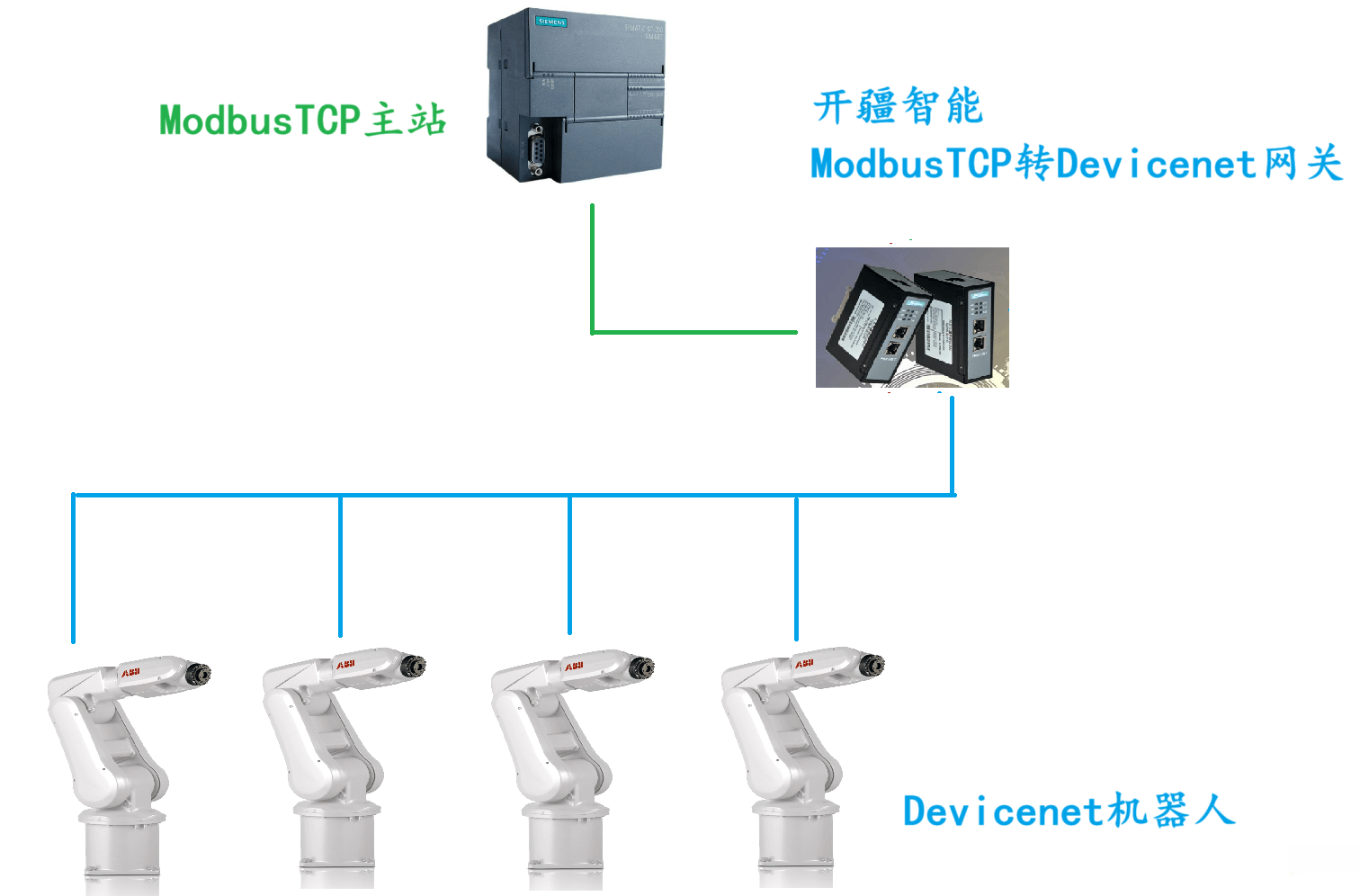
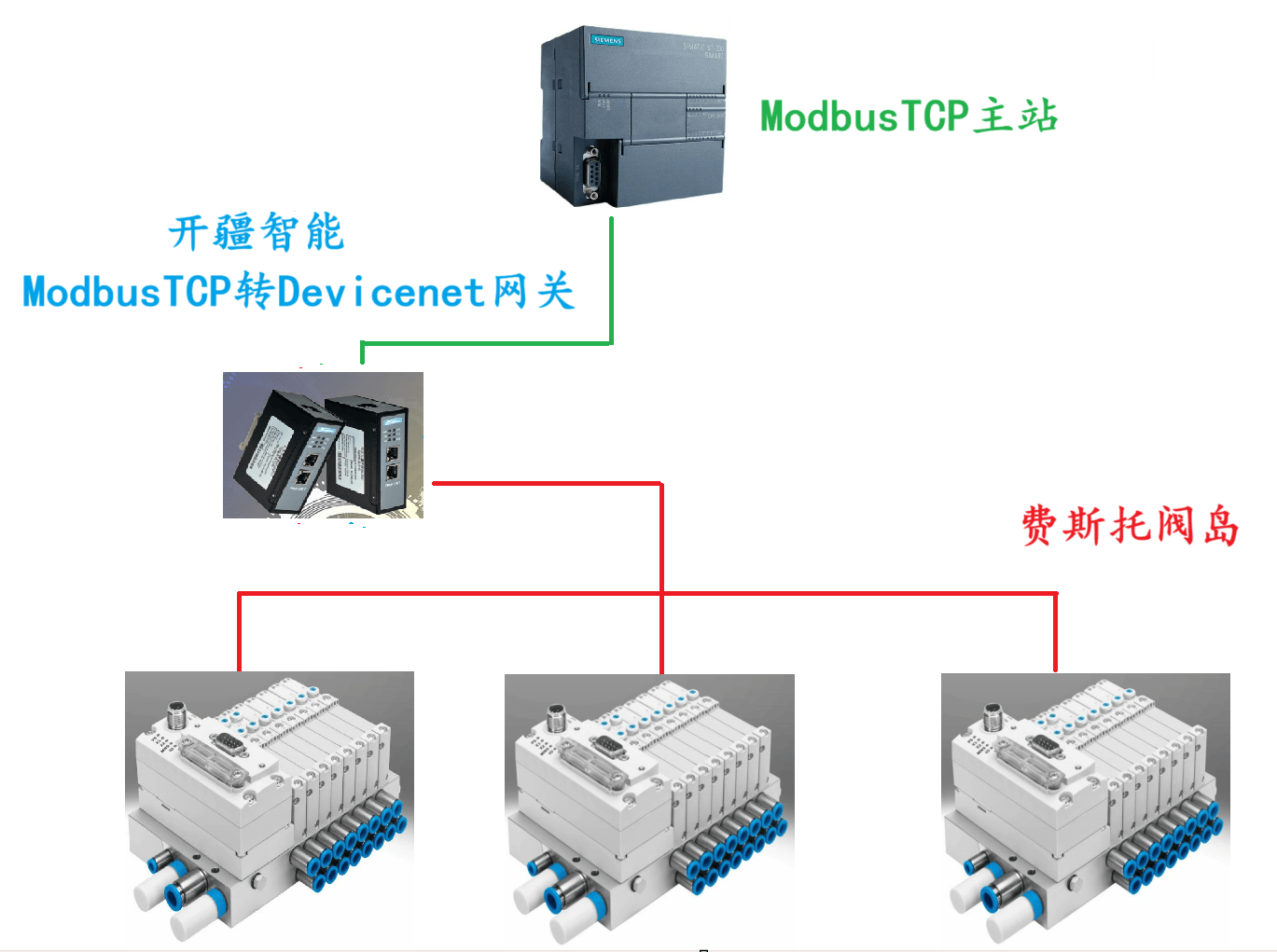
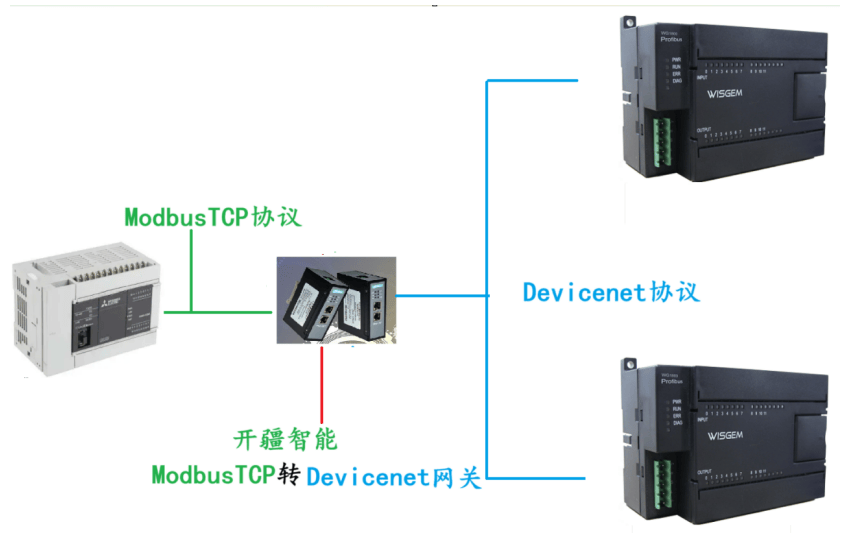
开疆智能Devicenet转ModbusTCP网关连接费斯托阀岛配置案例
本案例是ModbusTCP主站PLC通过开疆智能研发的Devicenet主转ModbusTCP网关连接费斯托阀岛的配置案例,具体步骤如下。
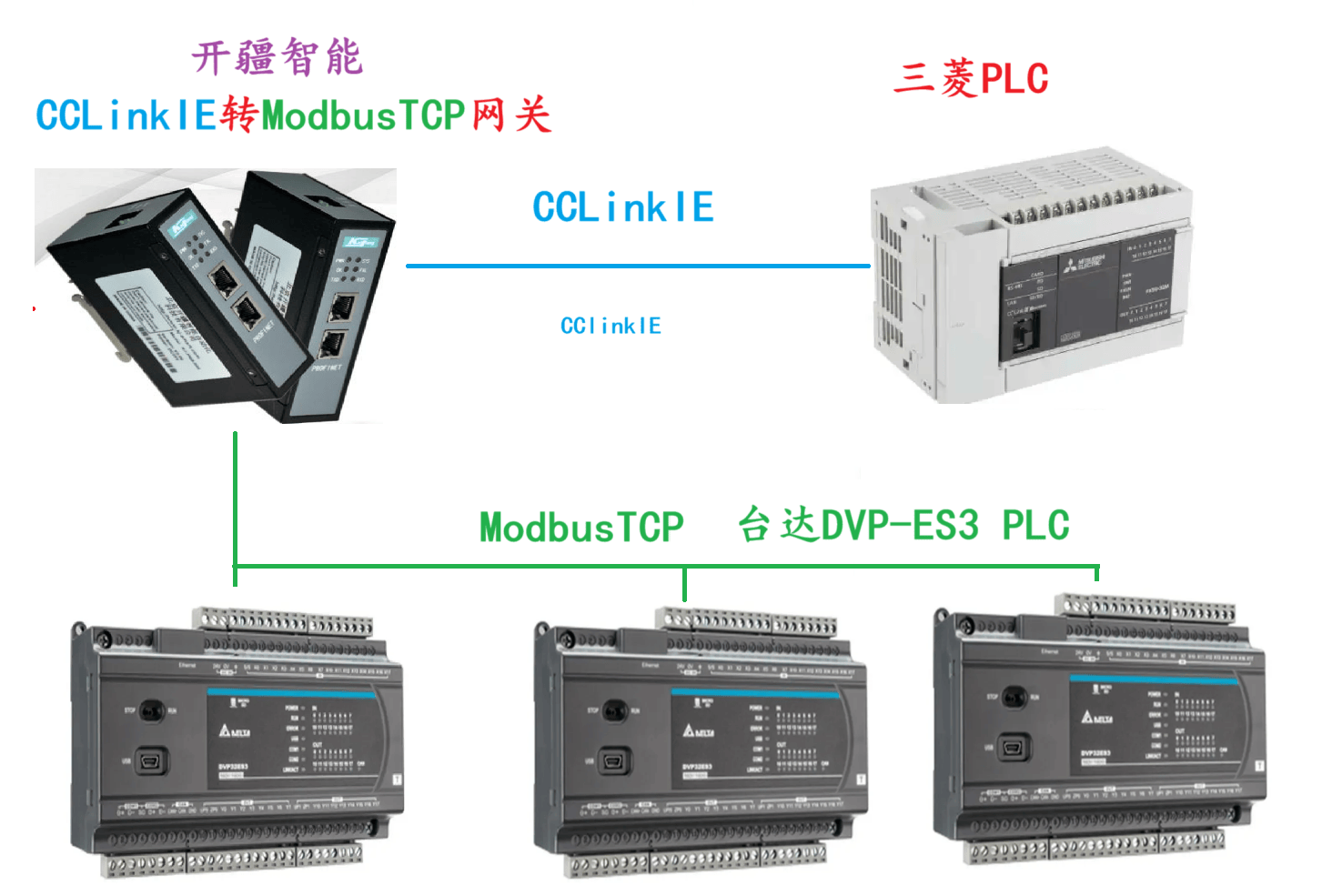
开疆智能ModbusTCP转CClinkIE网关连接台达DVP-ES3 PLC配置案例
本案例是通过开疆智能研发的ModbusTCP转CClinkIE网关连接台达DVP-ES3 PLC的配置案例。
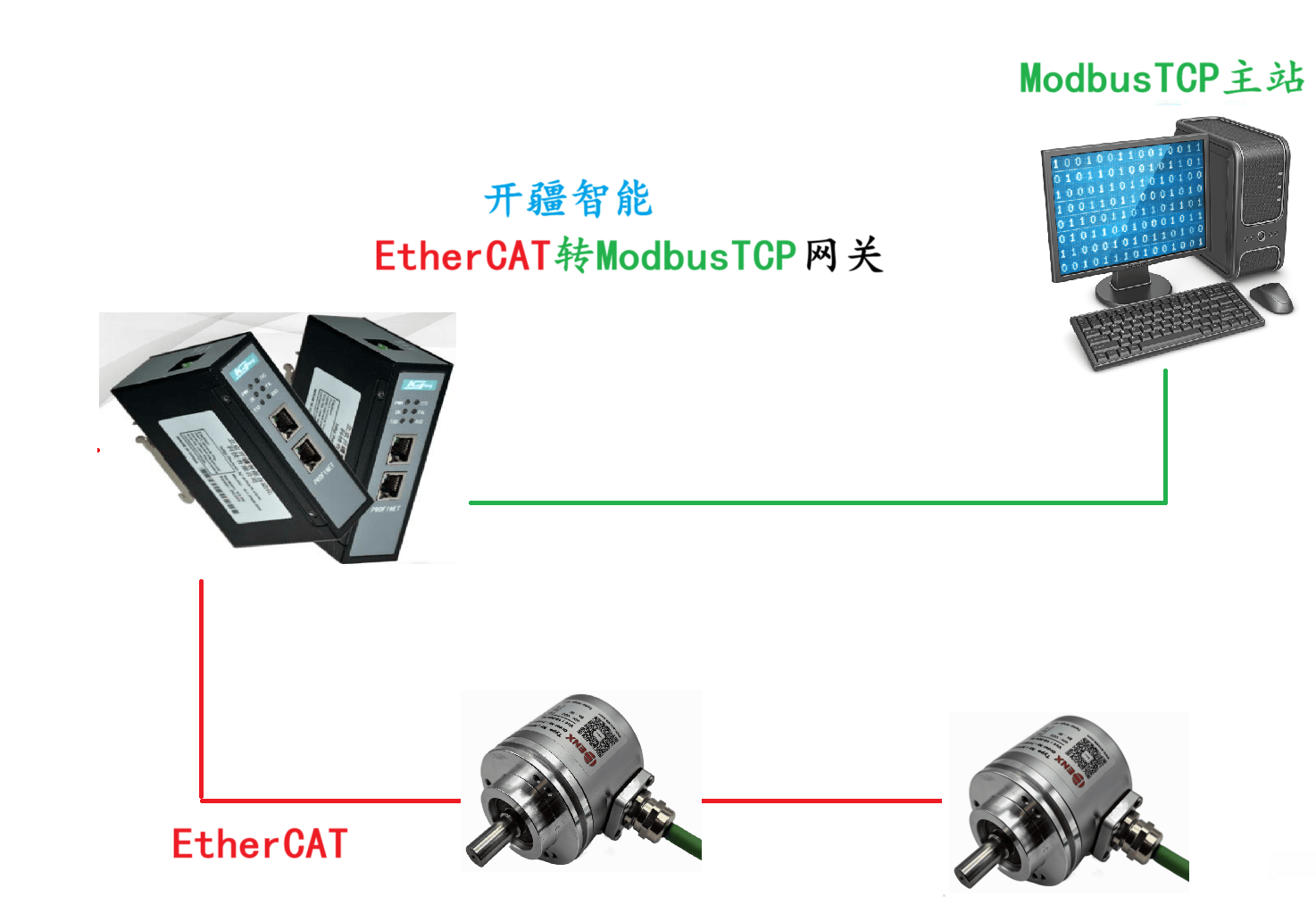
开疆智能ModbusTCP转EtherCAT网关连接IVO编码器配置案例
本案例是使用ModbusPOLL软件通过开疆智能ModbusTCP转EtherCAT网关连接编码器
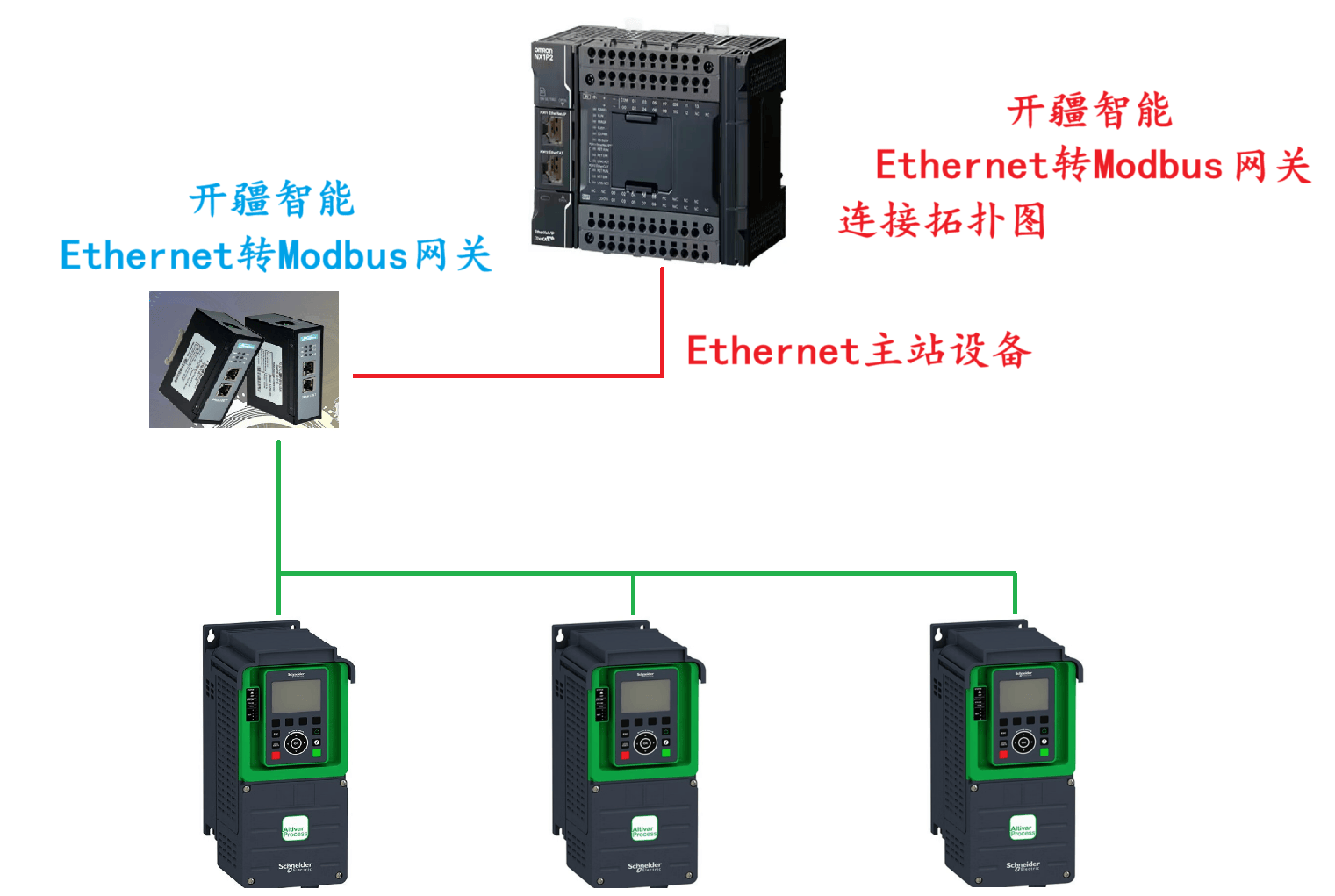
开疆智能Ethernet/IP转Modbus网关连接变频器配置案例
本案例是通过开疆智能Ethernet转modbus网关连接变频器的配置案例。 由于客户现场改造P
开疆智能Profinet转ModbusTCP网关连接WINCC配置案例
Wincc上位机软件开疆智能Profinet转ModbusTCP网关通过Modbus TCP/IP通信,将PLC集到的参数通过Profient
开疆智能Profient转DeviceNET主网关连接发那科机器人配置案例
此案例是由于客户在某车厂项目中,需要将甲方的发那科机器人介入到自己的Profinet网络系统中,由于机器人采用DeviceNET协议,故选择开疆智能研发的Profient转Device





 工商网监
工商网监
评论