 双轨速成:掌握CAN总线应用的实战秘籍
双轨速成:掌握CAN总线应用的实战秘籍

想要快速掌握CAN总线应用?本文提供双轨学习路径:理论与实践结合,从基础协议到项目实战,即可快速上手操作,助你高效突破技术门槛!
CAN(Controller Area Network,控制器局域网)是一种广泛应用于工业控制、汽车电子等领域的实时通信协议,由德国博世公司于1986年提出并标准化(ISO 11898)。
其核心采用多主(Multi-Master)总线架构,通过差分信号传输实现高抗干扰能力,支持节点间以广播形式进行高效、可靠的数据交换。
典型应用包括汽车ECU通信(如动力总成、车身控制)、工业自动化(如PLC联网)及医疗设备互联,其衍生协议如CAN FD(灵活数据率)进一步提升了带宽与灵活性,成为现代分布式控制系统的基础技术之一。
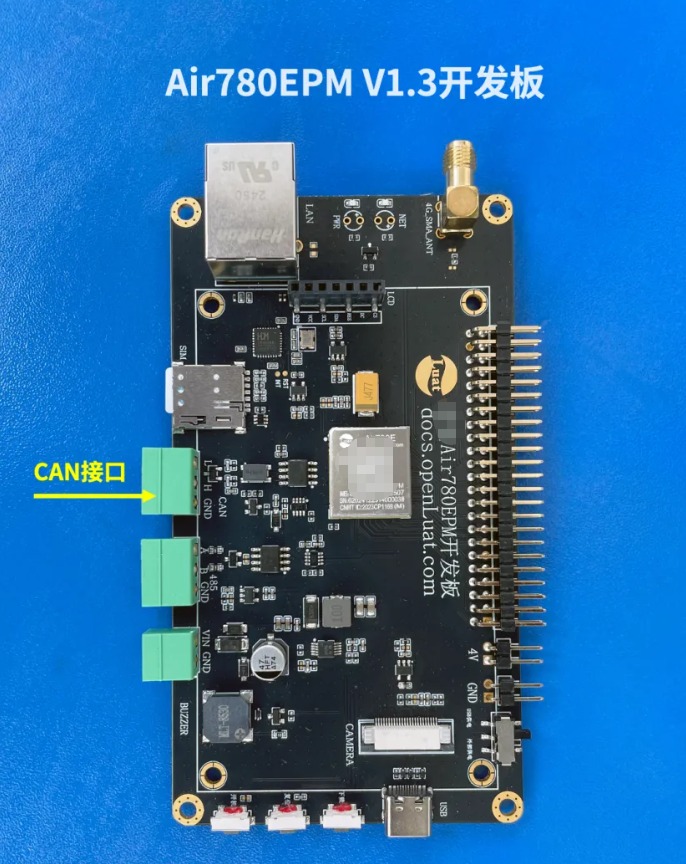
本文将以Air780EPM V1.3开发板为例,演示CAN功能示例要点。
一、两种硬件测试方式
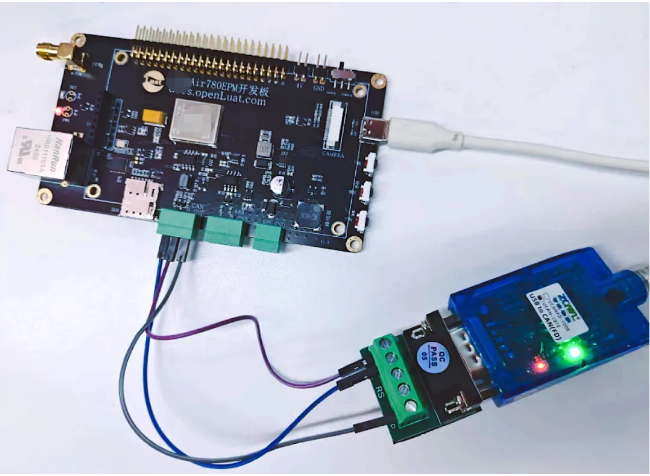
方式一:使用Air780EPM开发板CAN接口,连接高速USB-CAN分析仪,进行数据收发测试。
CAN采用差分信号传输,通过两根信号线(CANH 和 CANL)传输数据。两根线上的信号相位相反,即使存在干扰,接收端也能通过差值还原出原始数据。所以CAN接线可以不接GND。
方式二:使用两个Air780EPM开发板对接,进行CAN功能的收发测试。

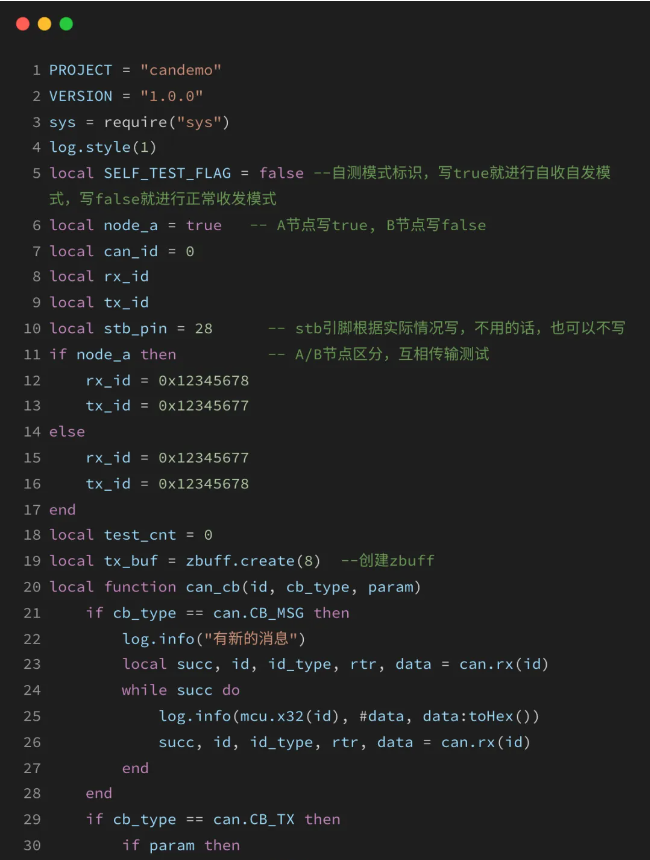
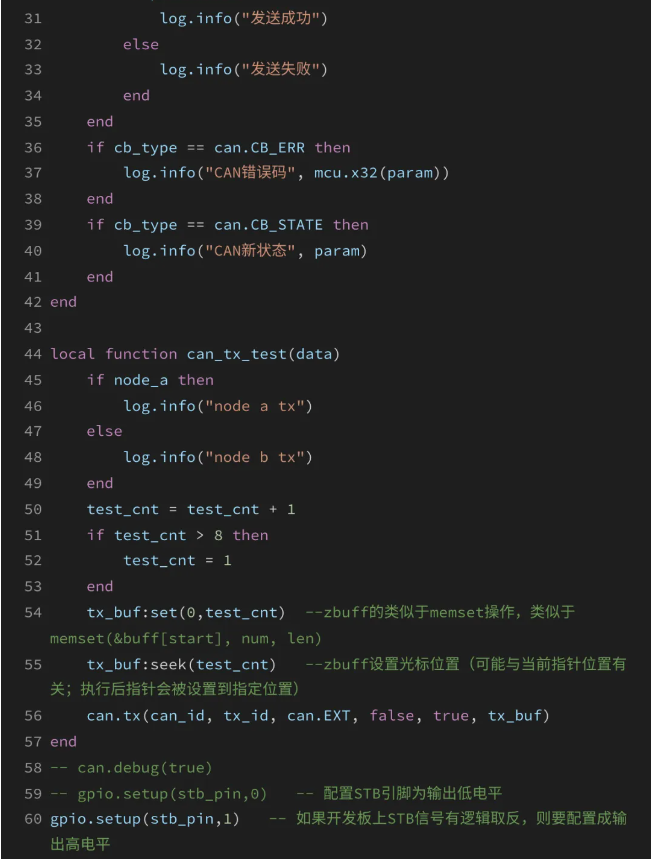
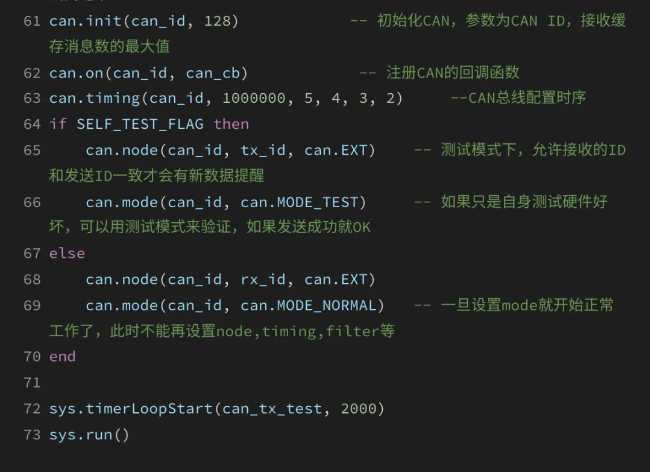
二、CAN功能示例
Air780EPM应用示例持续更新开放,可从源码仓库下载完整demo源码。
最新demo源码下载:https://gitee.com/openLuat/LuatOS/tree/master/module/Air780EPM/demo/can
三、示例测试结果
开发板通过LuaTools烧录内核固件和demo脚本代码,烧录成功后开机运行并查看日志。
实操教程详见:https://docs.openluat.com/air780epm/luatos/app/driver/can/
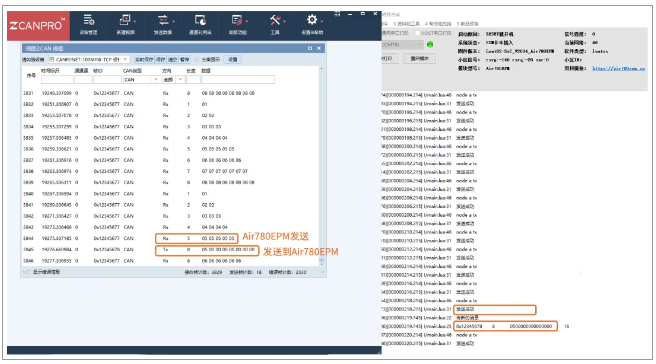
方式一:使用Air780EPM开发板和高速USB-CAN分析仪,进行数据收发。
测试结果如下图示:
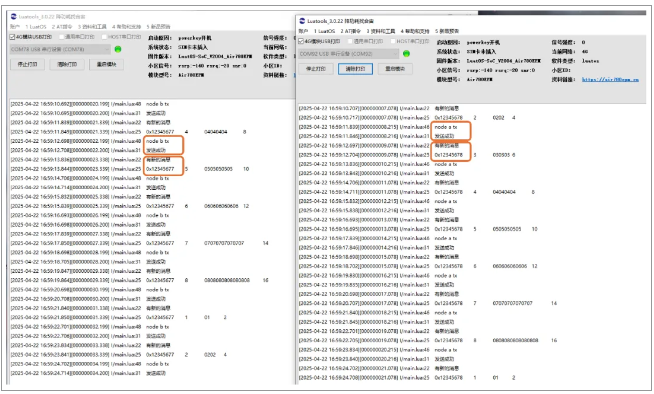
方式二:一个开发板为节点A,一个开发板为节点B,互相发送数据接收对方的数据。
测试结果如下图示:
今天的内容就分享到这里了~
审核编辑 黄宇
-
CAN总线
+关注
关注
145文章
1995浏览量
133328
发布评论请先 登录
CAN总线入门双捷径:零基础到实战的极速指南

CAN总线故障排查:从问题到解决的实战案例

CAN总线通信原理介绍 CAN总线模块选择指南
使用CAN总线的注意事项 CAN总线与其他通信协议对比

CAN总线与LIN总线的区别
如何使用Arduino实现CAN总线通信



【CAN总线知识】全面了解CAN总线协议






 工商网监
工商网监
评论