 高速飞行的无人机用SLAM怎样导航
高速飞行的无人机用SLAM怎样导航

谷歌SLAM算法Cartography的闭环演示
目前,无人机大多依靠周围环境地图完成导航。地图的绘制需要深度传感器对周围的实时环境进行扫描,再以此为基础创建3D模型。如此,无人机能够知晓自己所在的位置,以及该如何前往目的地。这便是SLAM (即时定位与地图构建) 技术。
虽然,SLAM已在自动驾驶领域得到广泛应用,但这项技术依然存在局限性,即需要大量高保真数据以及处理数据所依赖的强大运算能力。而高速飞行的无人机,如果要在严格的时间限制之内完成大量精确数据的收集和处理,便会对硬件和软件提出更高的要求,从而令成本大幅增加。
针对这一问题,麻省理工学院计算机科学与人工智能实验室 (CSAIL) 推出了名为NanoMap的运动规划框架,用于高速飞行无人机的导航和避障。这一系统依然需要收集周围环境的三维数据,但并不会将所有信息整合成一张完整的地图,而只需将信息存储在一系列3D快照中。这样一来,系统每秒需要处理的数据量得到有效减少,反应速度便可以更快。
NanoMap的工作原理是这样的 (如图) ——
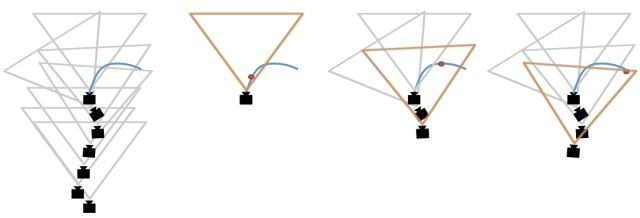
一系列3D快照反映出无人机的运动轨迹, 如灰色三角形 (左一) ,而蓝色曲线则表示人类为其设定的下一步运动轨迹。如要达到预定轨迹中的红点 (左二/右二/右一) ,则需回溯之前的3D快照,直至找到包含目标红点的视图。通过这一方式,系统可以判断障碍物的位置并以此为无人机制定运动规划。
虽然,这一方案中系统需要处理的数据量与SLAM相比明显降低,但其不足之处在于,需要回溯的3D快照越久远,便越难以确定拍下快照时无人机所在的位置。
针对不确定度 (uncertainty) ,传统的解决方案是让同一参照物的多个视图互相校准,从而绘制较为精确的周围地图。NanoMap则不同,依靠一系列3D快照进行建模,得出每幅快照的不确定度,选出不确定度最小的快照,再将这一不确定度计入无人机的运动规划。不确定度设定越高,无人机便会越远离障碍物。
无人机的不确定度主要来自惯性测量单元 (IMU) 测量加速度的准确度。如果加速度测量不够准确 (即相对位移不够准确) ,随着时间的推移,位置判定则会越发不准确,这一误差称为漂移 (drift) 。无人机飞行速度越快,漂移值也越大。因此,对高速飞行的无人机来说,尽管机身搭载有深度传感器,计算不确定度仍然非常重要。
研究人员在测试过程中发现,当漂移值达到25cm/s,不确定度的建模开始发挥明显作用。当漂移值接近75cm/s,NanoMap做出的运动规划避障成功率超过97%。而当漂移值达到1m/s,避障成功率为10%——而未计入不确定度时,成功率仅有3%。
测试结果表明,NanoMap可以支持10m/s的高速飞行。这一方案在提升导航避障系统性能的同时,又不会使小型无人机的计算设备负担过重。不过,这一方案依然有一些不足——
CSAIL的科研人员Peter Florence说,在需要周围环境高清地图的场景下 (比如灾难搜救) ,NanoMap可能并非合适的选择。另外,自动驾驶汽车制造商或许也更倾向于使用SLAM,因为汽车本身造价高昂,导航系统的成本可能并不那么引人注意。即便NanoMap不像超人一样全能,科学家们依然希望有一天,它能帮助无人机如苍鹰一般矫健地穿过茂密的丛林。
安创空间
安创空间(ArmAccelerator)是Arm全球唯一加速器,聚焦于人工智能和物联网产业的创新服务平台。安创一直致力于帮助技术驱动型创新创业企业精准对接生态资源、投资机构、销售渠道、宣传渠道,提供一站式深度加速服务;帮助资本市场对接最具投资潜力的创新团队,挖掘早期优质项目;帮助大企业寻找所需要的创新型项目,加速项目落地,做真正的创新引擎;帮助国外先进技术在国内落地,以及国内项目在国外渠道布局,注重国际合作与交流,推动全球创新。
原文标题:科技漫谈 | 高速飞行的无人机,不用SLAM怎样导航?
文章出处:【微信号:ARMaccelerator,微信公众号:安创空间ARMaccelerator】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
无人机导航的革命性突破:爱盛科技磁传感器导航增强系统

爱普生M-G370PDF复杂地形下无人机飞行的卓越应用

低空物流:无人机开启未来配送新篇章
爱普生M-G370PDS惯性测量单元在无人机导航中的应用

使用 Betaflight 和树莓派实现 FPV 无人机自主飞行!

晶振化身空中交警,为无人机飞行保驾护航

爱普生TG2520SMN温补晶振在无人机导航与通信的应用

《手把手教你做星闪无人机—KaihongOS星闪无人机开发实战》系列课程课件汇总
无人机传感器线圈的设计与制造工艺详解
精准导航的关键:揭秘GNSS模拟器在无人机行业的核心作用
无人机飞行控制器的组成部件和工作原理

从姿态到飞行控制,IMU全方位守护无人机飞行






 工商网监
工商网监
评论