 如何为ABB机器人添加外部轴(导轨)
如何为ABB机器人添加外部轴(导轨)

要为ABB机器人添加外部轴(导轨),很多同学都觉得一脸懵逼,那么如果遇到要添加外部轴(导轨)的情况,我们应该怎们做?
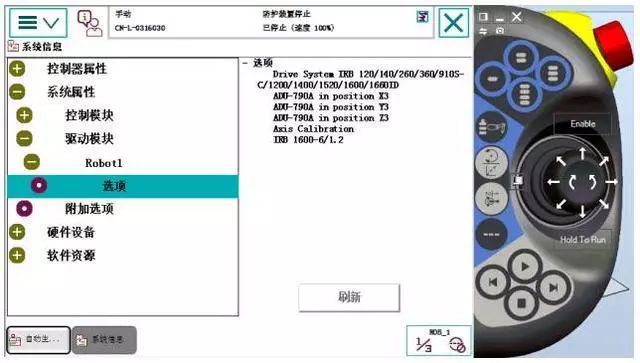
1、系统key要有外部轴选项,并且用该key做好系统,如下(下图示例为可以添加3个外轴驱动)
2、 打开robotstudio,找到如下界面
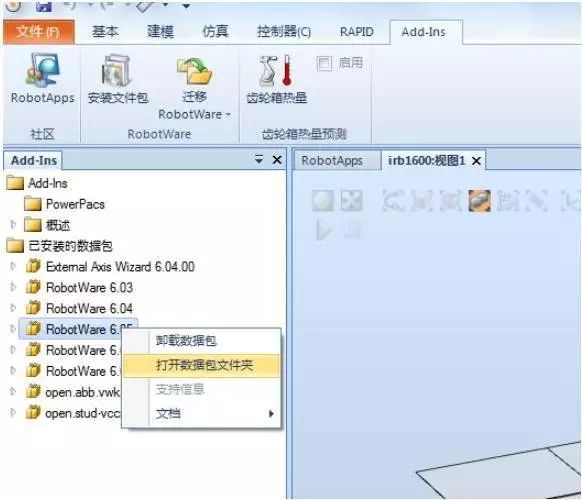
3、 找到如下路径
…ABB.RobotWare-6.05.0129RobotPackagesRobotWare_RPK_6.05.0129utilityAdditionalAxisTrack
4、出现下图,表示4个驱动柜,通常选择第一个

5、把M7L1B1T_DM1.cfg文件拷贝,放到U盘
6、示教器控制面板-配置,选择加载参数,然后重启

7、重启之后,就可以看到状态栏都了一个外部轴图标
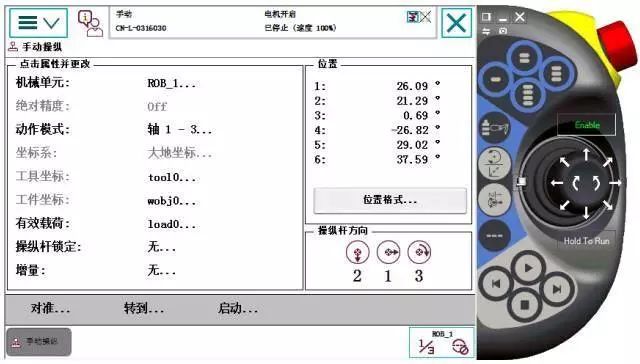
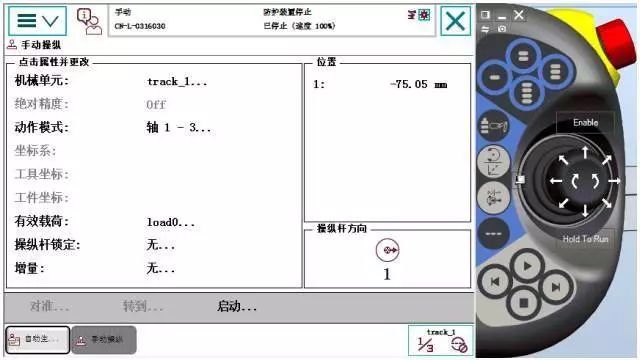
8、切换到外轴,后点击启动,即可以运动外轴
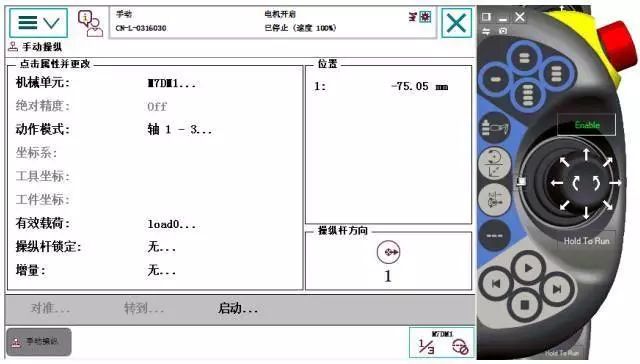
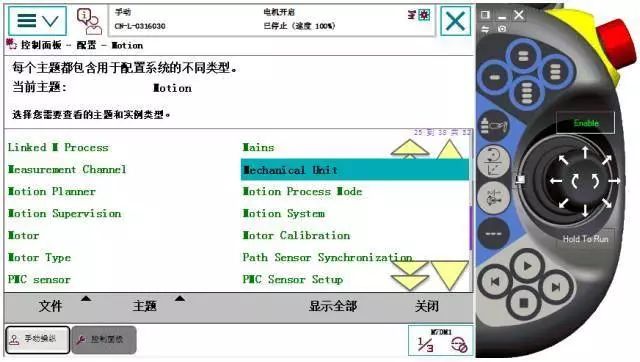
9、在控制面板-配置,主题选择motion里,arm下可以修改外轴上下限,导轨的单位是米
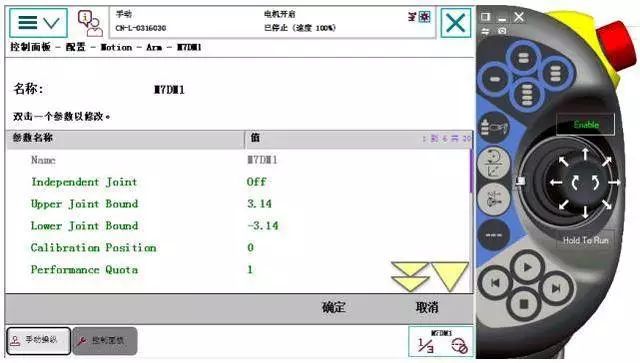
10、Mechanical Unit里可以修改外轴名字
11、修改名字为track_1
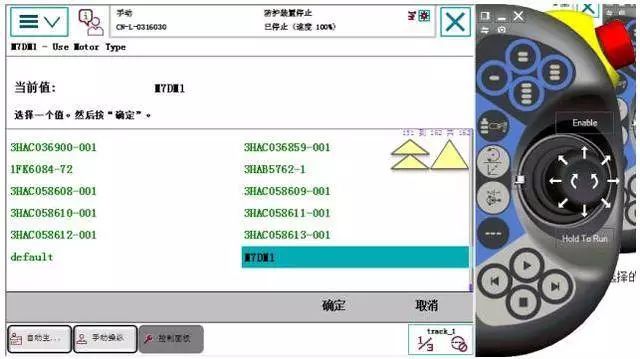
12、在控制面板-配置,主题选择motion里,找到motor,可以修改选择的motor-type
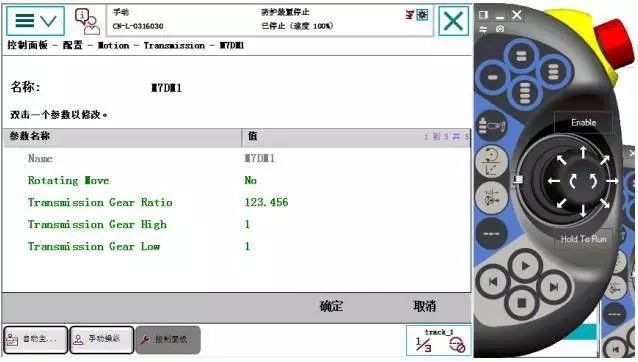
13、在控制面板-配置,主题选择motion里,找到transmission,可以修改减速比
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
29936浏览量
214387 -
ABB
+关注
关注
26文章
564浏览量
54562 -
控制面板
+关注
关注
2文章
95浏览量
7712
原文标题:干货 | 如何为ABB机器人添加外部轴(导轨)
文章出处:【微信号:指南车机器人科技,微信公众号:指南车机器人科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
ABB推出三大全新机器人系列
基于30多年在中国机器人行业的领导地位,ABB于7月2日重磅发布了Lite+、新一代IRB 1200小型工业机器人和PoWa协作机器人三大全新机器人
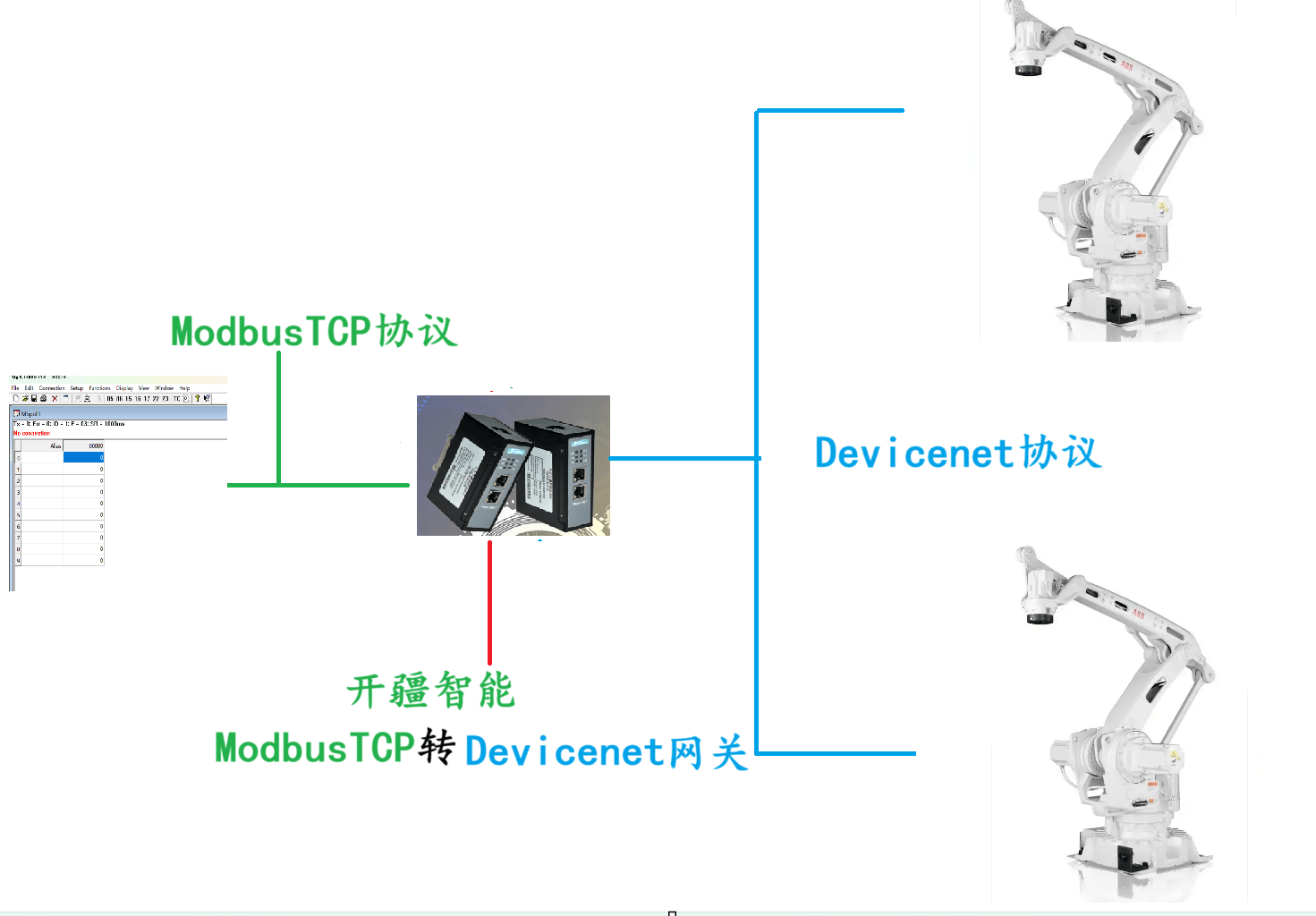
开疆智能ModbusTCP转Devicenet网关连接ABB机器人配置案例
本案例是模拟ModbusTCP主站软件通过开疆智能ModbusTCP转Devicenet网关连接ABB机器人的配置案例,具体过程如下。 配置过程 ABB机器人IO板配置 1、简介 (
开疆智能Profient转ModbusTCP网关连接ABB机器人MODBUS TCP通讯案例
本案例是通过开疆智能Profinet转ModbusTCP网关将西门子PLC与ABB机器人进行通讯 因西门子PLC采用Profinet协议,而ABB机器人采用的是ModbusTCP通讯。

盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
大象机器人成立于2016年,专注协作机器人研发与应用,产品线涵盖轻量级协作机器人、人形机器人、仿生机器人等多种形态。拳头产品myCobot系
发表于 04-25 17:59
ABB机器人与西门子PLC通讯案例
在现代工业自动化领域中,机器人与可编程逻辑控制器(PLC)之间的通讯是实现高效、精准生产线的关键。ABB机器人与西门子PLC作为行业内的佼佼者,其通讯技术的掌握对于提升生产效率、优化生产流程具有
ABB机器人(机械手臂)数据采集到MES系统解决方案
ABB工业机器人广泛应用于各种工业领域,能够替代人工执行高强度的生产工作,如码垛、焊接、冲压、喷涂、装配、分拣等,能够有效提高工作效率与质量安全。比如码垛工作,传统工厂需要人工搬运到托盘上,劳动强度

ABB机械手臂(机器人)数据采集物联网解决方案
ABB工业机器人广泛应用于各种工业领域,包括汽车制造、电子产业、食品和饮料生产、医药制造、物流和仓储等。它们可用于自动化的装配、焊接、喷涂、搬运、包装和机器人辅助操作等任务,极大地提高了工业生产效率

ModbusTCP转Profinet:ABB机器人与PLC的高效连接
在工业自动化领域,不同设备间的通讯和数据交换是系统稳定运行的关键。其中,ABB机器人与PLC(可编程逻辑控制器)之间的协作尤为重要。为实现这一目标,我们常常需要通过特定的通讯协议进行数据的传输和指令
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
安川工业机器人结构
的连接线缆,也可以根据现场的实际需求来进行选配。 --机器人本体各部分组成:由图可知安川6轴工业机器人可分为机器人底座、S头、L臂、U臂、手腕法兰盘,对应一到六

焊接机器人六个轴分别是什么作用
焊接机器人是现代工业自动化中的重要工具,其灵活性和高效性极大地提升了焊接质量和生产效率。在焊接机器人中,“六轴”是一个常见的结构设计,这六个轴赋予机






 工商网监
工商网监
评论