 Work Visual现场总线侧与机器人KRC侧的连接
Work Visual现场总线侧与机器人KRC侧的连接

使用SCA粘合控制的示例,显示了模拟输出的配置和配置。
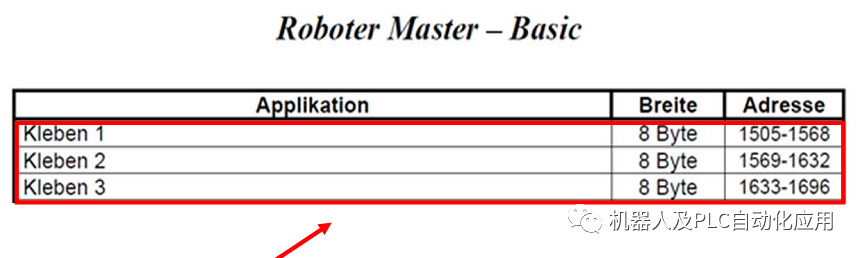
大众标准规定的涂胶模拟量IO范围
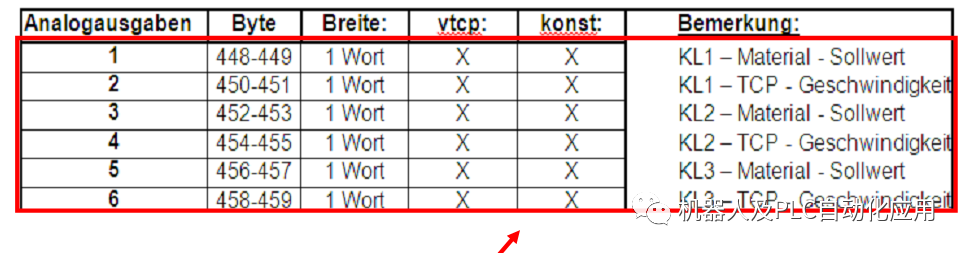
奥迪标准的涂胶模拟量范围
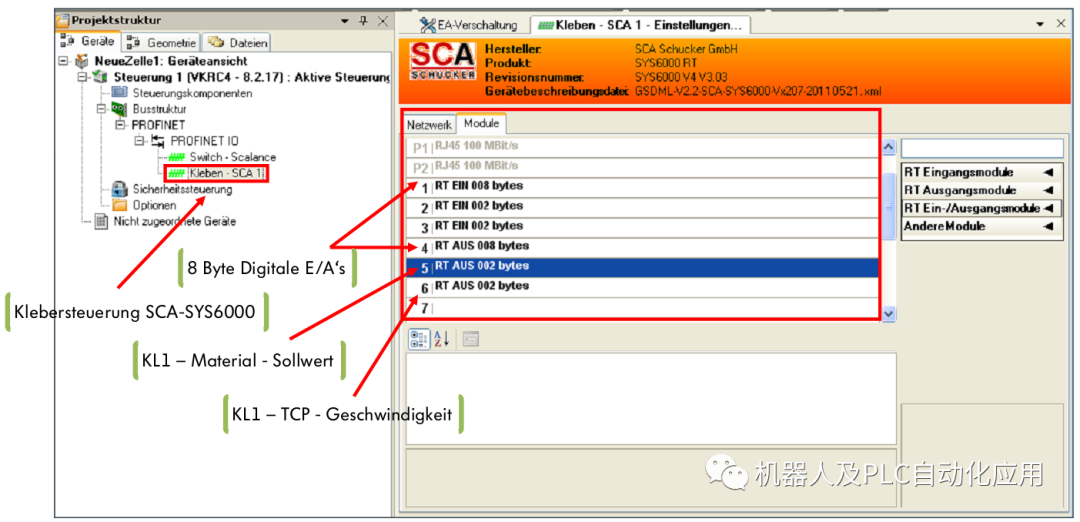
步骤1:SCA胶水控制设计(IP地址、设备名称、模块)
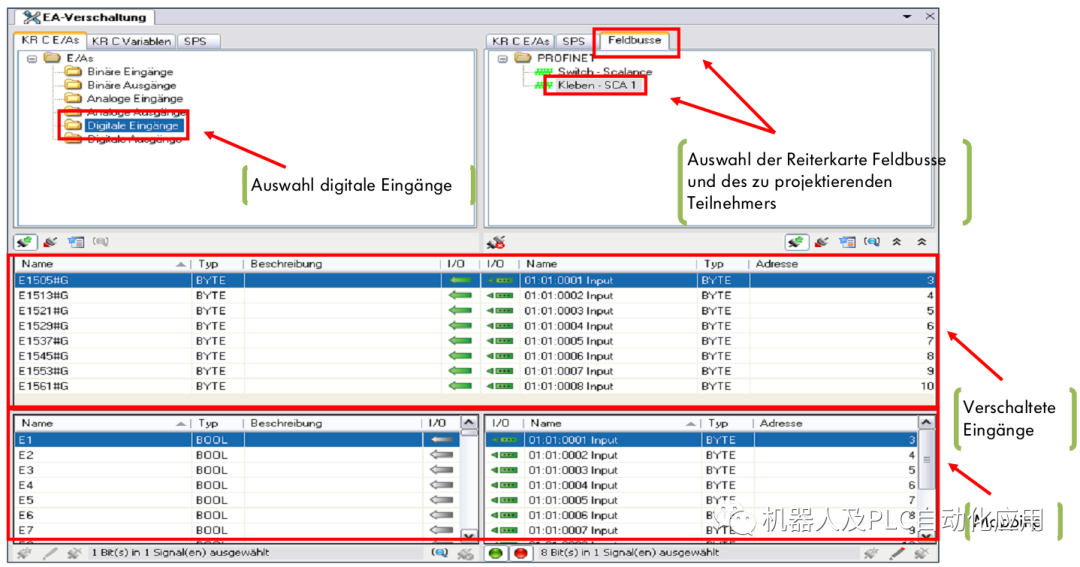
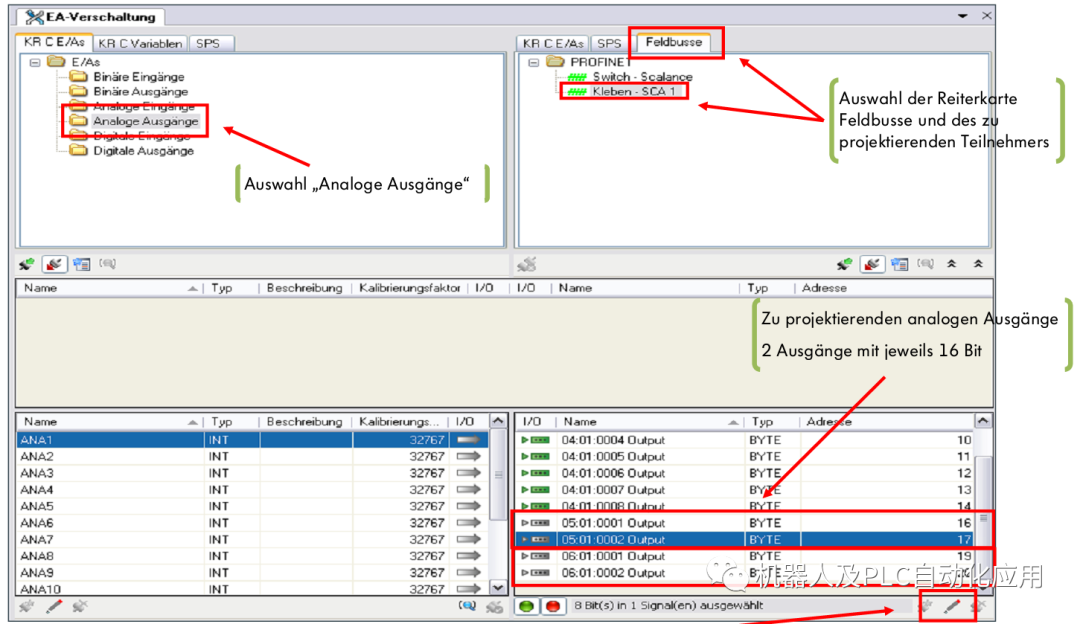
步骤2:数字I/O的映射,这里是示例性的KL1和数字输入。数字输出以模拟方式连接。
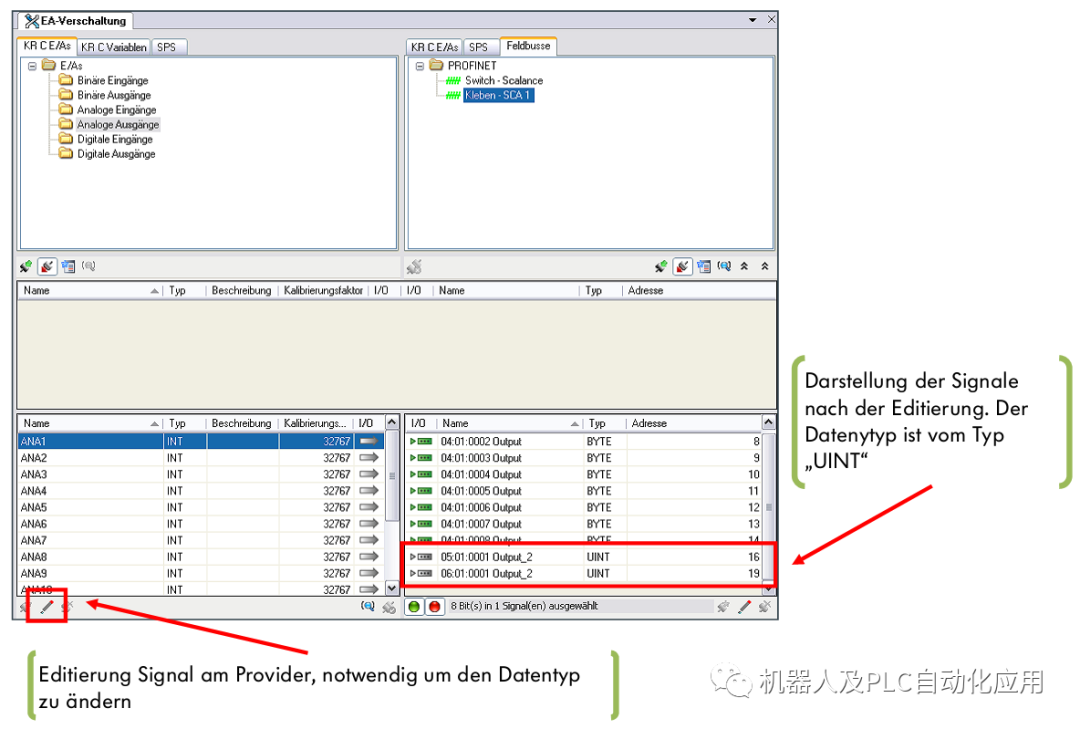
步骤3:映射模拟输出。按下“在提供商处编辑信号”按钮
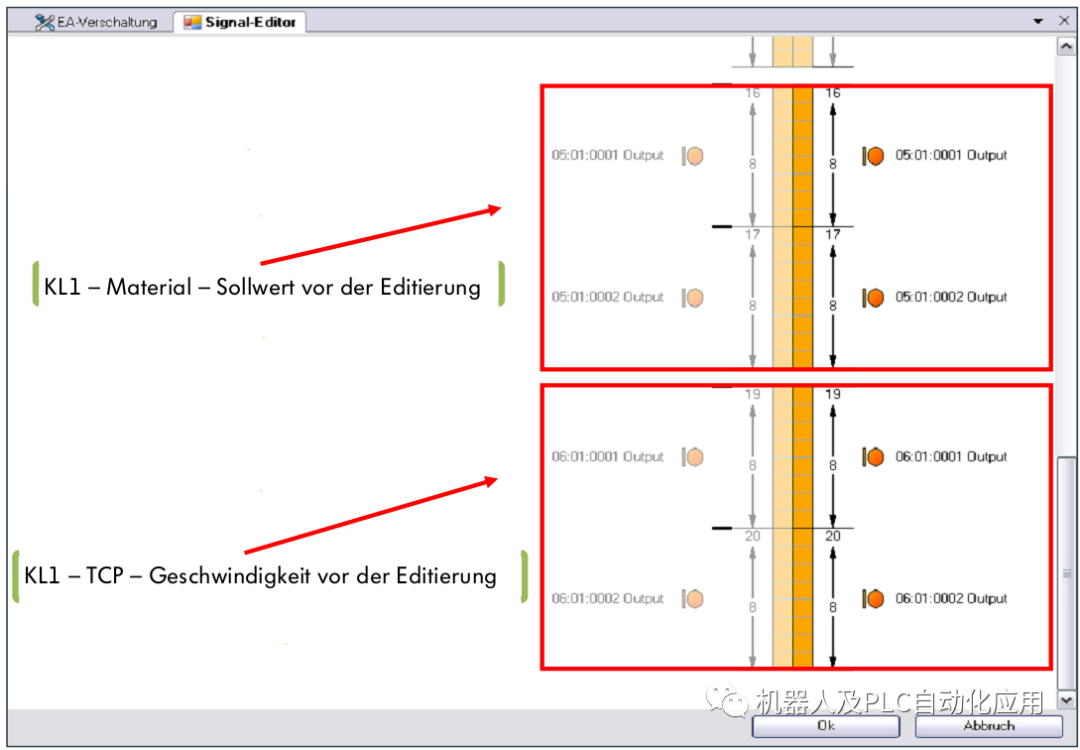
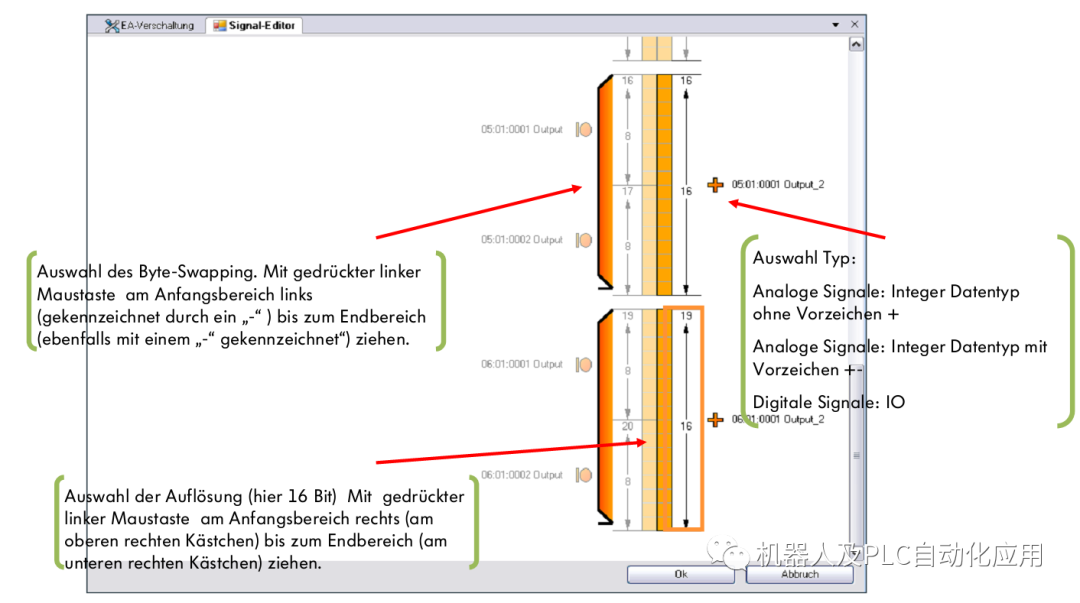
第4步:编辑信号。为此,将投影的IO缝合在一起,交换并转换为所需的格式。
 |
带正负号的整数数据类型(根据 SINT、INT、LINT 或DINT 的长度) |
 |
不带正负号的整数数据类型(根据 USINT、UINT、ULINT 或 UDINT 的长度) |
 |
数字式数据类型(根据 BYTE、WORD、DWORD 或 LWORD的长度) |
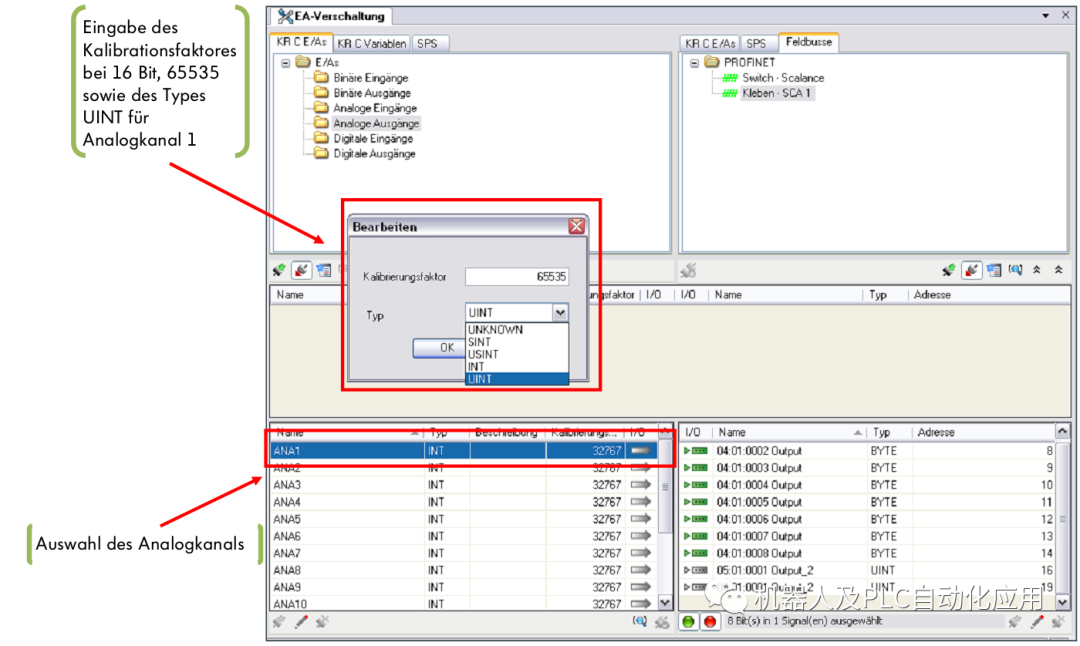
步骤5:编辑信号后,必须调整机器人侧模拟输入和输出的数据类型和校准系数。
步骤6:调整单个模拟通道
第7步:模拟输出调整成功后,即可进行连接。
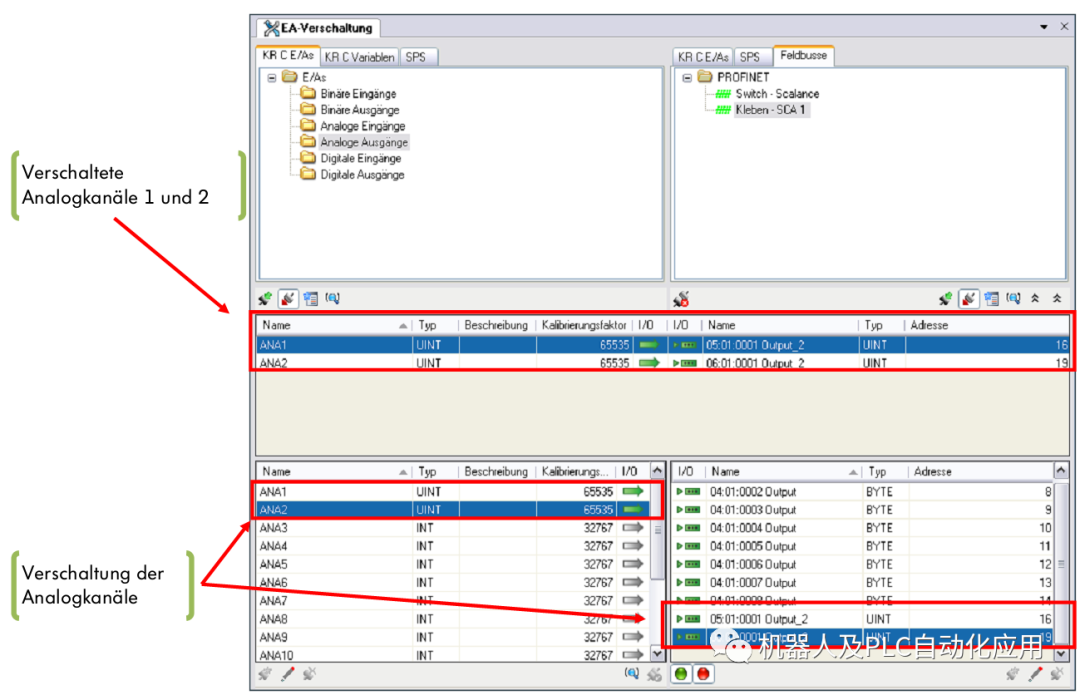
连接模拟输入/输出的项目规划步骤摘要
-参与者使用的模块投影
-使用“在提供者处编辑”功能编辑信号
-所需信号的汇总以及带或不带符号的数据指示
-字节交换(如果需要)
-机器人侧模拟输入或输出的调整(数据类型类似于现场总线侧,指示校准系数)
-现场总线侧与机器人KRC侧的连接
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
模块
+关注
关注
7文章
2800浏览量
51110 -
机器人
+关注
关注
213文章
29977浏览量
214667 -
总线
+关注
关注
10文章
2974浏览量
90153
原文标题:KUKA-Work Visual-投影模拟输入和输出
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
讨论:中国首例“机器人伤人”事件!?来自人工智能的威胁?!
`中国首次发生机器人伤人事件!?事发现场据网友爆料是这样的:“一台名为小胖的机器人在没有指令的前提下突然自行打砸展台玻璃,最终导致部分展台破坏。更为严重的是,机器人小胖还砸伤了路人!”
发表于 11-19 23:51
请问各位老哥:stm32直接can总线连接devicenet与abb机器人通讯可行?
stm32直接can总线连接devicenet与abb机器人通讯可行吗,需要另外加隔离或升压设备吗?请老哥们不吝赐教!
发表于 02-13 19:58
智能救援机器人的功能和作用
智能机器人配有许多能够识别环境参数的ADM238LJR传感器,可以采集蒸汽成分、现场图像界面、障碍物等信息。该无线数据传输控制模块能够在上位机软件中友好地将准确的自然环境信息内容显示在现场,并
发表于 11-30 15:10
移动机器人的三种主要运动系统
的某些术语对您来说是新的,请不要担心; 我会在我们继续的过程中向你解释。使用轮子运动使用轮子的机器人的驱动几何由每个机器人的转向方式定义。 有很多选择。差速转向移动机器人最常见的方式是差动转向。 基本形式由安装在
发表于 09-01 08:12
库卡机器人MGV电源模块维修
PH1013-2840库卡机器人KUKA主机维修KUKA驱动器模块维修C4库卡机器人驱动电源维修KPP600 3X64 KUKA机器人配件维修北京KUKA库卡机器人模块维修
发表于 09-08 07:30
【教程2】人形街舞机器人-机体组装及测试
:主轴朝上侧。配件:M2*5 自攻螺丝、圆头 M3*6 螺丝、垫片 M4*5 自攻螺丝图 24(5)肩部连接安装要求:大 U 件竖直安装。配件:M2*5 自攻螺丝、圆头 M3*6 螺丝图257机器人组装
发表于 08-12 17:07
基于现场总线的工业机器人监控系统研究
机器人技术和企业信息化技术是提高制造业生产效率和工艺水平的两大关键技术。本文在分析现场总线网络控制技术的基础上,介绍了一种利用Lonworks 总线将工业
发表于 08-15 09:31
?24次下载
软性心脏辅助机器人 单侧心脏衰竭病患福音
美国波士顿儿童医院研究人员开发出一种新型心脏辅助机器人,可帮助心脏单侧衰竭的病患。该装置结合了柔性致动器与刚性支架,可穿透心脏心室间的隔膜,提供单侧心脏温和但稳定的辅助泵浦,且不会干扰另一侧
发表于 12-18 09:38
?1166次阅读
KUKA机器人PN网络设置的限制
为了使外部PC能够通过网络连接到机器人控制器,必须对KLI进行配置。例如,这是能够通过网络将Work Visual项目传输到机器人控制器的前
KUKA KRC5微型小型机器人控制器介绍
每个机器人的核心都是它的控制器--KUKA机器人在这方面得到了令人印象深刻的更新:未来兼容的硬件和智能软件确保KUKA工业机器人KRC5的新控制器具有极高的效率和最大的成本效益。
探究KUKAC4-WorkVisual的输入/输出多重连接
多重连接 反馈给PLC的网络故障的就是使用多重报警。 为了在KCP中显示这些状态位,必须将状态位映射到KRC输入。 映射到KRC输入: 机器人主网合格 =输入3846
机器人控制器的多种设置及调试案例
RRS(Realistic Robot Simulation) : RRS 方式用于连接机器人厂家的 RCS 模块。RCS 模块需要从各个机器人厂家侧购买,其主要用于对机器人运动路径的
发表于 06-19 11:46
?3457次阅读

媒体报道 | 锚定“端侧AI+机器人”,移远又有大动作!
随着端侧AI算力的指数级突破与大模型轻量化部署技术的快速成熟,“端侧AI+机器人”成为全球科技巨头角逐的战略要地,这一黄金赛道正加速从概念演变为现实。作为全球领先的物联网整体解决方案供应商,移远通信






 工商网监
工商网监
评论