 如何实现大视场FoV更高角度分辨率的激光雷达呢
如何实现大视场FoV更高角度分辨率的激光雷达呢

基于各种工作原理的激光雷达(LiDAR)已经在许多领域获得应用,例如机器人导航、自动驾驶、无人机、地面勘测等。然而,激光收发器的数量限制了传统多通道激光雷达系统的垂直角度分辨率,并使其成本高昂。而MEMS微镜的兴起,能够为低成本、高角度分辨率的激光雷达系统提供非常有前景的解决方案。
据麦姆斯咨询报道,香港城市大学机械工程学院的研究人员通过结合机械旋转式激光雷达系统和MEMS微镜各自的优势,以更合理的系统成本实现了大视场(FoV)、更高角度分辨率的激光雷达解决方案。研究人员将MEMS微镜集成在自行设计的独立收发器模块中,并与360°旋转平台集成,以实现全景扫描。
与基于多通道的激光雷达系统相比,该系统不受激光源和探测器数量的限制,能够实现0.07°x 0.027°(水平x垂直)的角度分辨率以及360°x 8.6°(水平x垂直)的视场。该研究成果已经以“Development of the high angular resolution 360° LiDAR based on scanning MEMS mirror”为题发表于Scientific Reports期刊。
采用上述系统配置,能够以合理的价格(1700美元)实现360°视场的激光雷达系统。最后,研究人员还开发了一款数据处理程序,可以将扫描数据转换为3D点云图像,生成的图像验证了这款基于MEMS微镜的激光雷达系统的完整功能。
设计和原理
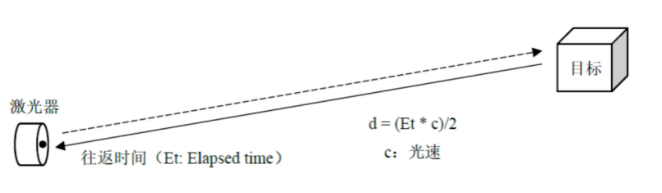
脉冲飞行时间(ToF)激光雷达系统的基本结构如下图所示。该系统由具有准直功能的905 nm激光模块(OSRAM SPLPL90)产生短激光脉冲。激光脉冲通过MEMS微镜的单轴反射实现垂直方向扫描,然后通过360°旋转平台实现全景扫描。再由探测器检测来自环境物体的反射脉冲。激光脉冲的飞行时间(借助快速运行的计数器测量)与环境物体和传感器之间的距离直接相关,从而通过数据处理可以实现周围环境的3D感知。
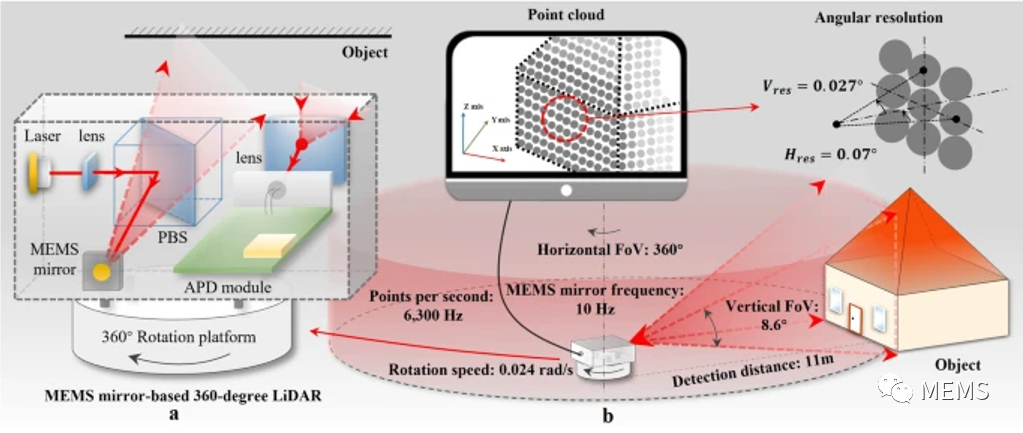
基于MEMS微镜的360°激光雷达系统:(a)激光雷达系统示意图,(b)激光雷达的工作场景和参数。
激光雷达系统的角度分辨率表示传感器可以分辨的两点之间的最小角度或线性间隔。换句话说,它可以被视为单位面积的单位脉冲数。因此,更高分辨率的激光雷达可以创建更密集的点云图。
基于MEMS微镜的360°激光雷达系统
激光雷达系统应用通常要求角度分辨率
在这项研究中,研究人员使用了机械角度为5°的MEMS微镜(Mirrorcle S45868),可受益于点对点或准静态光束转向。这意味着任何稳态模拟驱动电压都可以导致MEMS微镜的特定稳态模拟旋转角度,从而实现特定的光束方向。在DC(0 Hz)附近,注意到驱动电压和产生角度的一一对应关系:它具有高度可重复性,不会随时间发生可测量的退化。此外,通过增加变压器和杠杆结构,驱动范围可以扩大。它还具有优异的抗机械冲击和振动性能,功耗小于1 mW,并为标准的硅基量产工艺而设计。
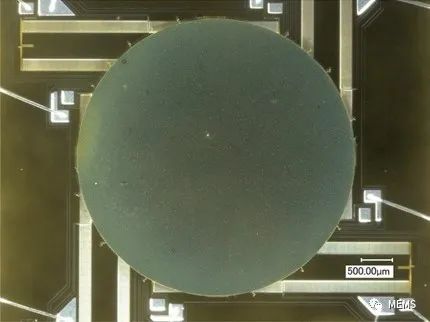
MEMS微镜结构
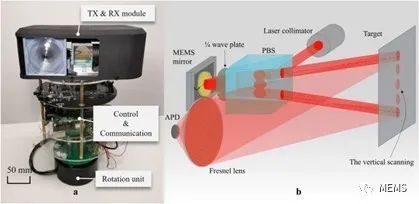
激光雷达系统设计:(a)360°激光雷达系统的结构,(b)发射和接收模块示意图。
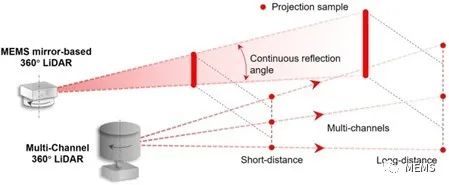
基于MEMS微镜的激光雷达和多通道激光雷达的扫描机理对比
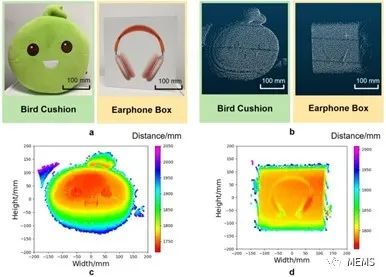
扫描试验结果:(a)扫描对象(抱枕和耳机盒)照片,(b)扫描点云图,(c)抱枕深度图,(d)耳机盒深度图。
增大接收模块视场的有效方法是采用具有更大有效面积的雪崩光电二极管(APD)。对于这项工作,研究人员选择了有效区域直径为1.5mm的APD,并采用了直径为50 mm、焦距为10 mm的菲涅耳透镜,以实现8.6°的垂直视场。
总结来说,研究人员展示了一种基于MEMS微镜的具有高垂直扫描分辨率的360°激光雷达系统。该系统的水平扫描通过360°旋转平台实现,而垂直扫描通过MEMS微镜实现。基于水平和垂直扫描要求,通过设计激光发射器和APD接收器的光路,并开发控制和通信电路,实现了完整的激光雷达系统。
根据实验结果,该系统在视场(水平方向360°,垂直方向8.6°)和角度分辨率(水平方向0.07°,竖直方向0.027°)方面取得了良好的性能。和市售Velodyne HDL-64激光雷达传感器相比,该系统的垂直角度分辨率提高了13.8倍。该特性可进一步实现高质量全景扫描,能够为自动驾驶、机器人导航、室内测量等应用提供更经济的解决方案。
审核编辑:刘清
-
mems
+关注
关注
129文章
4201浏览量
194974 -
探测器
+关注
关注
15文章
2714浏览量
74602 -
激光雷达
+关注
关注
973文章
4257浏览量
193375 -
激光收发器
+关注
关注
0文章
6浏览量
7871
原文标题:结合MEMS微镜和机械旋转平台,实现高角度分辨率360°激光雷达
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
全固态激光雷达为什么迟迟未来?其技术难点是什么?
FMCW激光雷达,加速落地工业场景
SPAD席卷车载激光雷达市场
激光雷达(LiDAR)技术方案与工作原理全解析

自动驾驶激光雷达:原理、类型与应用梳理

激光雷达进化史:从机械式到全固态
激光雷达VS高分辨率感知雷达:为更安全、更智能的汽车选择合适的传感器
HDMI接口支持哪些视频分辨率
激光雷达技术的基于深度学习的进步
激光雷达在地形测绘中的作用
激光雷达与其他传感器的比较
物联网系统中的自动驾驶的“眼睛”_纯固态激光雷达






 工商网监
工商网监
评论