 FANUC¿ÊØ磺ó¼àùçáåùÑ₤ø¡êŸ
FANUC¿ÊØ磺ó¼àùçáåùÑ₤ø¡êŸ

FANUC¿ÊØ磺ó¼àùåùÑ₤ø¡êŸàÓüôùªòƒÈ˜åùÑ₤ø¡êŸ¯■¤˜åùÑ₤âÁÅëÀÂö£øûø¡òƒñ«¤éÀÂö£øûò»ƒïâÁÅëÀÂØóÑ₤ùìÑàÀÂÑ´ö£âÁÅëÀÂÑ₤漡§¥Æø¡êŸÀÈ
L @P[i] 400mm/sec FINE offset
À¯LÀÝÝÚòƒøÝüÔåùÑ₤ȘåùÑ₤ø¡êŸøÅåùÑ₤âÁÅë¢èöˆÈ¤J:JointÈ´¿Ä§ÖåùÑ₤ÈˋÀÂLȤLinearÈ´øÝüÔåùÑ₤ÈˋÀÂCȤCircularÈ´åý£ÀåùÑ₤ÈˋÀÈ
À¯@ÀÝÝÚòƒçÝú¯ö£øûø¡òƒÀÈ
À¯P[i]ÀÝÝÚòƒiö£øûçáØ£¯Ðö£øûò»ƒïȘåùÑ₤ø¡êŸøÅö£øûò»ƒïâÁÅë¢èöˆÈ¤P[ ]: Ø£¯Ðö£øûÀÂPR[]: ö£øû¥áÇÌó¼È˜iåÖóðøÅÝÚòƒö£øû¤éÀÈ
À¯400mm/secÀÝÝÚòƒ¿ÊØ磺ó¼àùåÖåùÑ₤¿»°äøÅØóÑ₤ùìÑàÀÈ
À¯FINEÀÝÝÚòƒåùÑ₤çშàñÑ´ö£È˜åùÑ₤çáÑ´ö£âÁÅë¢èöˆÈ¤FINE(ƒ¨àñÑ´ö£)ÀÂCNTÈ´ñúƒ¨àñÑ´ö£ÈˋÀÈ
À¯offsetÀÝÝÚòƒåùÑ₤ö£øûý¿°Ëø¡êŸÈ˜åùÑ₤¡§¥Æø¡êŸ¢èöˆÈ¤ACCÈ´¥Æ¥¾ùìÝÑôòø¡êŸÈˋÀÂoffsetÈ´ö£øûý¿°Ëø¡êŸÈˋÀÂINCÈ´å—ê¢ø¡êŸÈˋçàÀÈ
åùÑ₤âÁÅë
1ÀÂFANUC¿ÊØ磺ó¼àùåùÑ₤âÁÅëÆÅȤý£§½ÅÅ¿š¥È¢Äøó/æùòó¢Äøóçá¿Ä§ÖåùÑ₤À§½ÅÅ¿š¥È¢Äøó/æùòó¢ÄøóçáøÝüÔåùÑ₤ÀÂØ奯åý£ÀåùÑ₤ÀÈ
2À¿ħÖåùÑ₤ È´JÈˋ
3ÀÂøÝüÔåùÑ₤È´¯■¤˜Å»æˆØóÑ₤Èˋ È´LÈˋ
4ÀÂåý£ÀåùÑ₤ È´CÈˋ
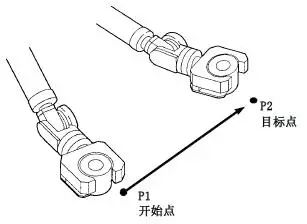
(1) ¿Ä§ÖåùÑ₤J
¿Ä§ÖåùÑ₤òú£ºó¼àùîÄæéùªÆÅøÃë˜òÝ¥ÆùìȘåÖòƒ§äùìÑàüôØóÑ₤¤µÈ˜ë˜òÝ¥¾ù줵ëÈø¿È˜ë´°ÈØóÑ₤¿š¥ÈöˆñúüÔÅåÀȿħÖØóÑ₤ùìÑàçáçËö£È˜ØåüÁÑåæŸÇµØóÑ₤ùìÑàçá¯ìñøÝàâÇ¥úò—ÀȿħÖåùÑ₤øÅøÅçá¿ÊƒÔæùòóý£òÉ秢ÄøóÀÈ
â»æÆȤ
1ȤJ P[1] 100% FINE
2ȤJ P[2] 70% FINE
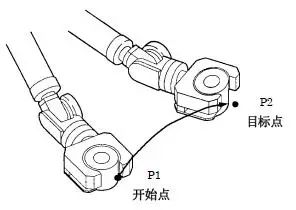
(2) øÝüÔåùÑ₤L
1) øÝüÔåùÑ₤òúØåüÔÅåñ§ò§ÑåÇÆåùÑ₤¢ˆò¥çÐ秧Ãò½çÐÀÈøÝüÔØóÑ₤ùìÑàçáçËö£È˜ÇÆmm/secÀÂcm/minÀÂinch/minÀÂsec øÅîÀåþÀÈøÝüÔåùÑ₤øÅçá¿ÊƒÔæùòó¢èØåòÉ秢ÄøóÀÈ
â»È¤
1ȤJ P[1] 100% FINE
2ȤL P[2] 500mm/sec FINE
2) Å»æˆåùÑ₤òúò¿ÆûøÝüÔåùÑ₤Șò¿¿ÊƒÔçáæùòóÇÆ¢ˆò¥çÐ秧Ãò½çÐØå¿ÊƒÔ¥ãçÐöˆøÅÅáÅ»æˆçáØ£øøØóÑ₤ñ§ñ´ÀÈÅ»æˆåùÑ₤øÅçá¿ÊƒÔæùòó¢èØåòÉ秢ÄøóÀÈÇùòÝȘØóÑ₤ùìÑà؈Æûdeg/sec öˆçËö£ÀÈØóÑ₤¿š¥ÈÈ´¿ÊƒÔ¥ãçÐØóÑ₤çáúÕ¢—üôÈˋë´¿»üÔÅåñ§ò§§½ÅÅ¢ÄøóÀÈ
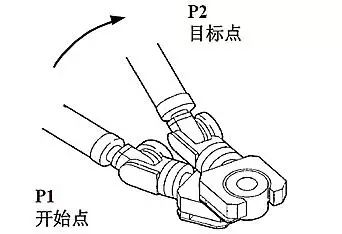
â»È¤
1ȤJ P[1] 100% FINE
2ȤL P[2] 30deg/sec FINE
(3) åý£ÀåùÑ₤C
åý£ÀåùÑ₤òúÇÆåùÑ₤¢ˆò¥çÐë´¿»ƒÙÆèçÐ秧Ãò½çÐØååý£Àñ§ò§åùÑ₤ÀÈóðåÖØ£¡—ø¡êŸøÅÑåƒÙÆèçФëá¢ÝõçЧ½ÅÅòƒ§äÀÈåý£ÀØóÑ₤ùìÑàçáçËö£È˜ÇÆmm/secÀÂcm/minÀÂinch/minÀÂsec øÅîÀåþÀÈåý£ÀåùÑ₤øÅçá¿ÊƒÔæùòó¢èØåòÉ秢ÄøóÀÈ
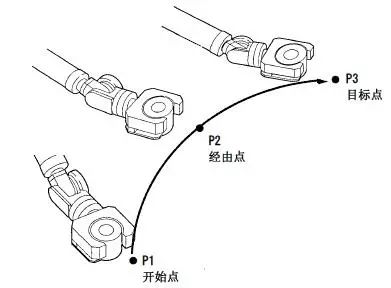
â»È¤
1ȤJ P[1] 100% FINE
2ȤC P[2]ȤP[3] 500mm/sec FINE
-
¿ÊØ磺ó¼àù
+¿ÄæÂ
¿ÄæÂ
91öáíô
3468ð₤ââê¢
94579 -
Fanuc
+¿ÄæÂ
¿ÄæÂ
19öáíô
121ð₤ââê¢
37790
åÙöáÝõäãȤÀƒ¥¥ò¾À¢FANUC¿ÊØ磺ó¼àùåùÑ₤ø¡êŸ§ãö—ÈÀ
öáíô°—ÇÎȤÀƒöÂÅé¤éȤø¡áü°ç£ºó¼àù¢ó¥¥È˜öÂÅ鿨øÖ¤éȤø¡áü°ç£ºó¼àù¢ó¥¥À¢£ÑÆÙäڥƿÄæÂÈÀöáíôæˆåÄúŠæÂû¼°—ÇÎÀÈ
ñÂý¥óâôÜúŠüà çúô¥
¿ÊØ磺ó¼àùüÔò½§ØûÄ | ÅåáɥưøøºêΣºó¼àùæ¼ØçÅÏôòöàÑ´åƒè»

¿ÊØ磺ó¼àùçáäÄçÐ
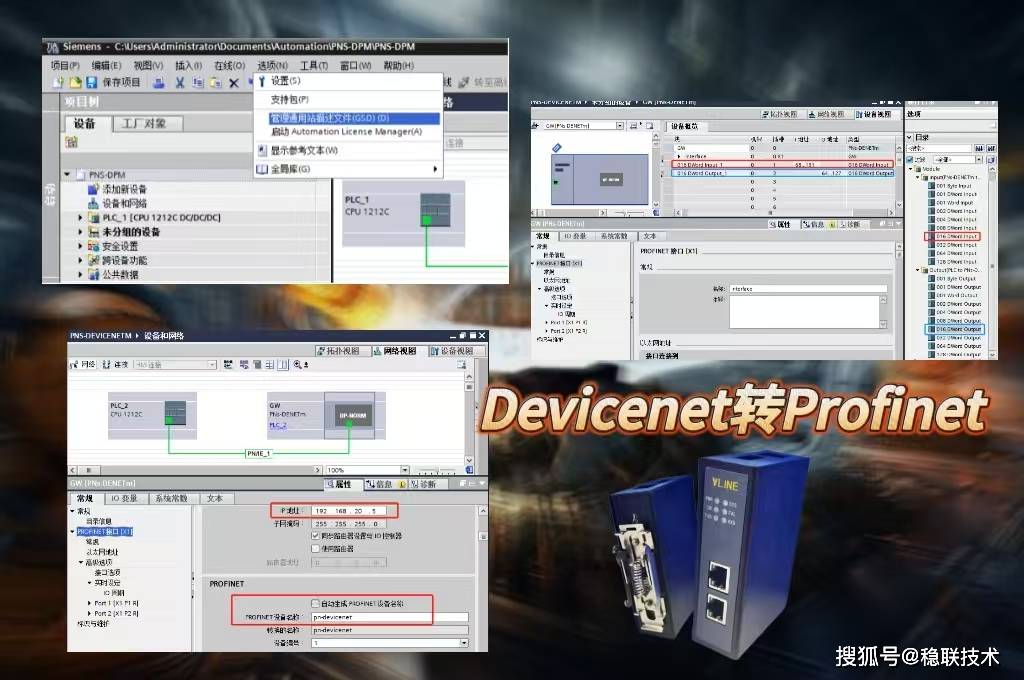
¢ˆ§ÛøúáÉModbusTCPæˆDevicenet뽿Ä꘧ÆFANUC£ºó¼àùéðøû¯¡â»

¿ÊØçë´Åé§ÓçáÀ¯åôâüÀÝȤCC\\-Link IE¤ëDeviceNetàÓ¤öúÈóÞ£ºó¼àùçáÀ¯¤šüÔÀÝ
¿ÊØ磺ó¼àùÆŠÅÙæ¼£ºó¼àù¡éáŸý£ë˜

éäçÐ#£ºó¼àù¢ˆñÂó§ä´
üõü¡§ÕèÉ£º°ÀøúáÉø¡ôñ£ºó¼àùçá¿Êæ¼åÙâÚ
ÀƒÀ¡# ROS 2øúáÉ£ºó¼àù¢ˆñÂò祪À¿åáÑêäÍîÕÀ¢£ºó¼àùàŠûéçáØ»ôñòÕ
ÀƒÀ¡# ROS 2øúáÉ£ºó¼àù¢ˆñÂò祪À¿åáÑêäÍîÕÀ¢+áÖàï°¾òÑ
¿ÊØ磺ó¼àù¿Êæ¼íƒç᧴èÒØãØÍ
DeviceNetæˆProfinet뽿Ä+FANUC£ºó¼àùȤǷ嚿ÊØç§ÓçáûÞ¯åòøäæȘíó¢ÄößüߢèáÉ





 ¿Êèäë½¥Á
¿Êèäë½¥Á
óâôÜ