 【精选好文】玩转OpenHarmony PID:教你打造两轮平衡车
【精选好文】玩转OpenHarmony PID:教你打造两轮平衡车

简介
此次为大家带来的是OpenAtom OpenHarmony(以下简称“OpenHarmony”)系统与PID控制算法相结合并落地的平衡车项目。 PID控制算法是一种经典的,并被广泛应用在控制领域的算法。类似于这种:需要将某一个物理量保持稳定的场合,比如维持平衡,稳定温度、转速等,PID都会适用。在四轴飞行器,平衡小车、汽车定速巡航、温度控制器等场景均有应用。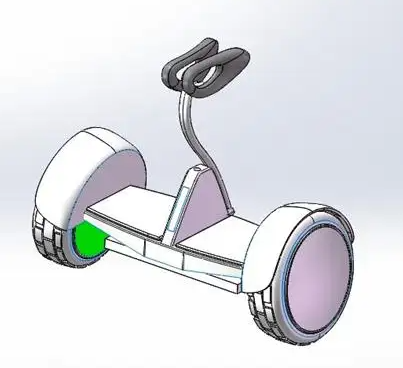
 ?通过本样例的学习,开发者能够对OpenHarmony系统设备端开发有进一步的认识,还能够掌握PID控制算法的使用。本样例使用OpenHarmony 3.2 Beta1操作系统,硬件平台采用小熊派BearPi-HM Nano(Hi3861)开发板。
本样例效果动图:
?通过本样例的学习,开发者能够对OpenHarmony系统设备端开发有进一步的认识,还能够掌握PID控制算法的使用。本样例使用OpenHarmony 3.2 Beta1操作系统,硬件平台采用小熊派BearPi-HM Nano(Hi3861)开发板。
本样例效果动图:
 ?
?硬件配置资源
- 两轮平衡小车主要硬件资源:
- 主控CPU:小熊派BearPi-HM Nano(Hi3861)开发板;
- 陀螺仪:MPU6050六轴陀螺仪传感器;
- 左右轮:带有霍尔传感器的直流电机;
- 小车平台及结构件资源可以自行在相关网站获得。
原理概括
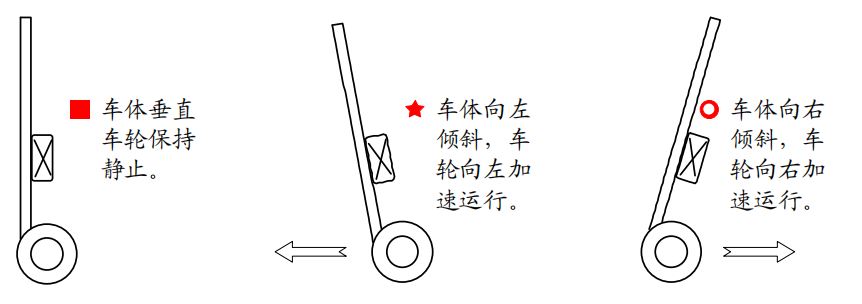
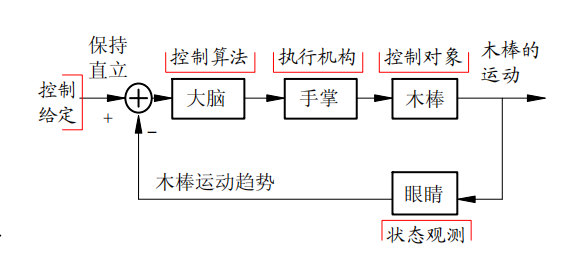 ?小时候都玩过上图游戏吧:木杆立在手指上,尽量保持木杆直立不倒。
当木杆向前倾斜时,我们会往前行走,以用来抵消木杆的前倾;往后倾斜时,我们会往后倒退。对的!没错!你猜对了。平衡车的控制原理就是这样:
?小时候都玩过上图游戏吧:木杆立在手指上,尽量保持木杆直立不倒。
当木杆向前倾斜时,我们会往前行走,以用来抵消木杆的前倾;往后倾斜时,我们会往后倒退。对的!没错!你猜对了。平衡车的控制原理就是这样:
 ?
?PID算法介绍
平衡车的控制离不开对PID算法的应用。那么什么是PID算法?它能解决什么问题? PID算法:就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种常见的“保持稳定”控制算法。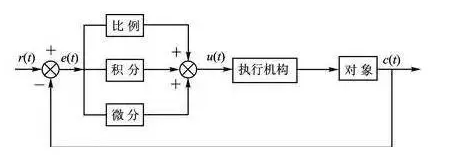
 ?结合两轮平衡车的场景,对PID参数的认识如下:
?结合两轮平衡车的场景,对PID参数的认识如下:- P比例参数:该参数能够快速让小车达到平衡状态,但是由于控制是滞后的,以及是惯性系统,容易带来超调,即小车会出现前后摇摆的现象。所以P参数不能太大;
- I积分参数:小车由于摩擦力或者风阻力,并且P不能太大,只靠P控制有可能达不到稳定状态,所以需要加入I积分参数,消除稳态误差;
- D微分参数:平衡小车维持的是倾斜角度要为平衡角度,由于PI参数使小车振荡,小车会出现前后摇摆现象,加入D微分参数能够消除小车的振荡。
两步搭建样例工程
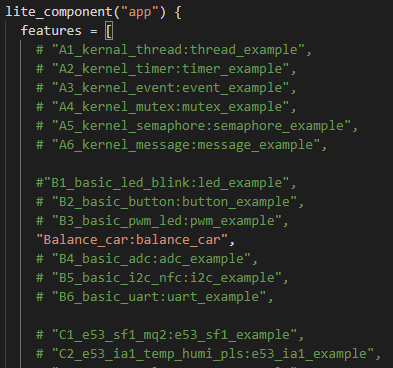
在OpenHarmony源码基础上,两步构建平衡小车代码。(OpenHarmony源码下载路径及BearPi-HM Nano(Hi3861)开发板代码烧录,请参考文章末尾相关链接) 第一步:拷贝Balance_car文件夹到源码路径下:deviceoardearpiearpi_hm_nanoapp (Balance_car文件获取路径,请参考文章末尾相关链接) 如图文件夹目录: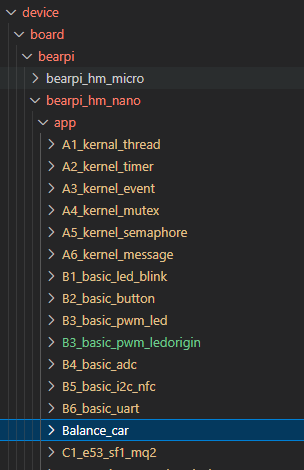 ?第二步:修改BUILD.gn,在源码路径下:deviceoardearpiearpi_hm_nanoappBUILD.gn
添加编译依赖:"Balance_car:balance_car",如下图:
?第二步:修改BUILD.gn,在源码路径下:deviceoardearpiearpi_hm_nanoappBUILD.gn
添加编译依赖:"Balance_car:balance_car",如下图:
 ?
?关键算法讲解
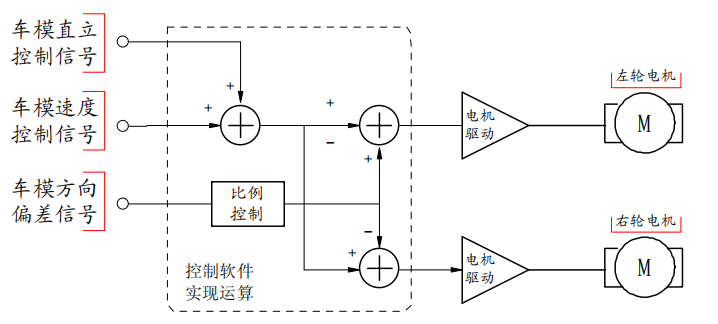
两轮平衡车的控制主要涉及三个PID环的串联使用,它们分别是直立环(平衡控制)、速度环(速度控制)、转向环(方向控制)。三个控制效果合成,控制轮子运行。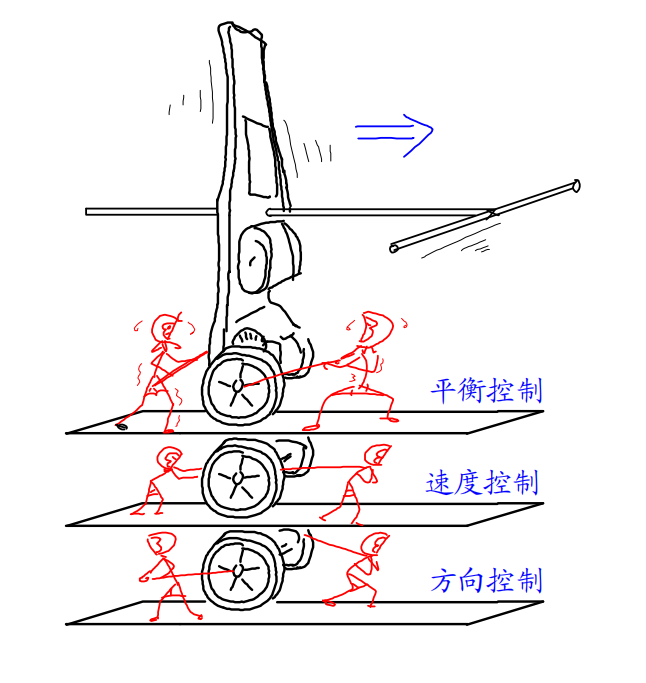
 ?直立环控制算法:直立环控制算法是平衡小车维持平衡的主要算法。直立环采用了PD算法环节,即只有比例与微分环节。
倾斜角度大小以及角加速度大小决定了轮子的速度大小。可以理解为倾斜角度越大,控制轮子顺着倾斜的方向的速度越大;倾斜的角加速度越大,控制轮子速度也要越大。
?直立环控制算法:直立环控制算法是平衡小车维持平衡的主要算法。直立环采用了PD算法环节,即只有比例与微分环节。
倾斜角度大小以及角加速度大小决定了轮子的速度大小。可以理解为倾斜角度越大,控制轮子顺着倾斜的方向的速度越大;倾斜的角加速度越大,控制轮子速度也要越大。
float g_middleAngle = 1.0;//平衡角度
float g_kpBalance = -85800.0;
float g_kdBalance = -400;
static int ControlBalance(float angle, short gyro)
{
int outpwm = 0;
float angleBias = 0.0;
float gyroBias = 0.0;
float tempAngle = 0.0;
float tempGyro = 0.0;
tempAngle = 0 - angle;//极性控制
tempGyro = 0 - gyro;
angleBias = g_middleAngle - tempAngle;
gyroBias = 0 - tempGyro;
outpwm = (g_kpBalance / 100 * angleBias + g_kdBalance
* gyroBias / 100);
return outpwm;
}
速度环控制算法:速度环控制的目的是让机器以恒定速度前进或后退,该恒定速度可以为0速度,即要让平衡车静止。速度环采用了PI环控制,只有比例与积分环节。
float g_kpSpeed = 95800.0;
float g_kiSpeed = 200;
static int ControlSpeed(long int left, long int right)
{
int outpwm = 0;
int speedBias = 0;
int speedBiasLowpass = 0;
static int speed_i = 0;
float a = 0.68;
static int speedBiasLast = 0;
speedBias = 0 - left - right;
speedBiasLowpass = (1 - a) * speedBias
+ a * speedBiasLast;
speedBiasLast = speedBiasLowpass;
speed_i += speedBiasLowpass;
speed_i = limit_data(speed_i, SPEED_H, SPEED_L);
outpwm = (g_kpSpeed * speedBiasLowpass / 100 +
gkiSpeed * speed_i / 100);
return outpwm;
}
转向环控制算法:转向环的目的是控制小车以恒定速度转向。在本次场景为了控制小车平衡静止,所以只做了限制转向的操作。
static int ControlTurn(short gyro)
{
int outpwm;
outpwm = g_kpTurn * gyro;
return outpwm;
}
以上详细代码,请参考文章末尾的相关链接(Balance_car文件获取路径)。
总结
本文呈现了两轮平衡小车的大致原理。简单介绍了一下PID算法的效果:P比例参数,能够快速让系统达到稳定值,但是P太大容易超调,带来振荡;I积分参数,消除稳态误差,让系统达到稳定值;D积分参数,能消除振荡,但是会使系统时效性变慢。开发者可以根据现场情况,合理调节PID三个参数。 本样例是OpenHarmony知识体系工作组为广大开发者分享的样例。同时知识体系工作组结合日常生活,给开发者规划了各种场景的Demo样例,如智能家居场景、影音娱乐场景、运动健康场景等;欢迎广大开发者一同参与OpenHarmony的开发,更加完善样例,相互学习,相互进步。本文由电子发烧友社区发布,转载请注明以上来源。如需社区合作及入群交流,请添加微信EEFans0806,或者发邮箱liuyong@huaqiu.com。
热门推荐干货好文
1、?24Bit ADC高精度低功耗MCU 医疗级别设备参考设计(附上高精确算法+电路原理图)?
2、超强性能AI芯片,OpenHarmony多系统支持,可定制高性能AP(附10+开发Demo)
3、从零入门物联网OH开源平台,从简单到高阶项目,创客、电子爱好者都爱用!
4、低成本ESP32方案,支持OpenHarmony系统开发(附10+项目样例Demo)
5、NO RTOS移植!32位、64线程开发板,超强实时性体验!
6、四核64位,超强CPU ,看RK3568“竞”开发板DEMO!
7、人工智能也能这么玩, 简单快速入手,还能自定义AI运算
8、业界首款!支持富设备开发,OpenHarmony开发者都选它!
9、高性能双核RISC-V,满足大多数开发,这款国产MCU工程师都爱了!
原文标题:【精选好文】玩转OpenHarmony PID:教你打造两轮平衡车
文章出处:【微信公众号:电子发烧友论坛】欢迎添加关注!文章转载请注明出处。
-
电子技术
+关注
关注
18文章
923浏览量
58327 -
电子发烧友论坛
+关注
关注
5文章
198浏览量
1368
原文标题:【精选好文】玩转OpenHarmony PID:教你打造两轮平衡车
文章出处:【微信号:gh_9b9470648b3c,微信公众号:电子发烧友论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
电动两轮车仪表盘2.0时代来临,开启智慧出行新潮流

晶华微新欧标两轮车BMS解决方案

杰发科技亮相2025年两轮车智能化技术发展大会
武汉芯源半导体CW32L010在两轮车仪表的应用介绍

武汉芯源半导体CW32L010在两轮车仪表的应用介绍
杰发科技持续赋能两轮车智能化升级

两轮电动车智能蓝牙无钥匙开锁模组
Microchip推出电动两轮车生态系统

两轮车智能化研究:主机厂扎堆进入,两轮车智能化持续提升

Qorvo助力电动两轮车性能提升
两轮电动车系统介绍与THVD8000在两轮电动车上的应用

LTE-CAT1模组在两轮车电池中的应用





 工商网监
工商网监
评论