 香港中文大学开发出“FreeBOT”球形机器人
香港中文大学开发出“FreeBOT”球形机器人

香港中文大学的研究团队开发了“FreeBOT”球形机器人,其大小比垒球略大,可以在平面上滚动并在墙壁和斜坡上攀爬。机器人彼此粘在一起,也可以彼此分开,并共同创造各种形状和动作。
FreeBOT模块是一个内部装有磁铁的球形机器人,它由两部分组成:磁铁球形壳体和内部驱动机构。内部驱动机构有两个轮子,并由两个直流电动机通过齿轮驱动。内轮在球壳中的位置通过电机控制,并且独立在平面上滚动。强大的内部磁体允许在铁磁壁上垂直移动。
原型的内部结构
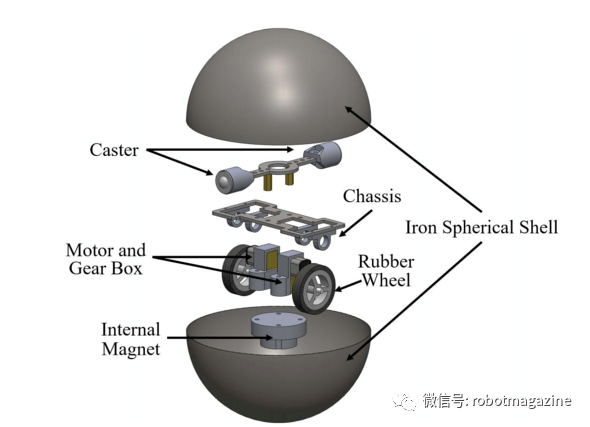
FreeBOT的分解图
FreeBOT内部磁铁很小,但是会产生很强的外部磁场。它集成了其他模块,以便被磁场吸引,甚至在集成后也沿模块移动。由于几乎整个模块都是接触点,集成机器人组可以各种形状移动。例如,两个机器人可以一起工作以攀登非铁磁纸板台阶,或攀登其他模块(例如梯子)。
原文标题:一组球形协作移动的机器人“Free BOT”
文章出处:【微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
29939浏览量
214457
原文标题:一组球形协作移动的机器人“Free BOT”
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
轮式移动机器人电机驱动系统的研究与开发
系统,开发了一套二轮差速驱动转向移动机器人电机驱动系统,完成了系统各部件的整体装配和调试。试验结果表明,该设计方案可行、系统运行稳定可靠、成本低廉、所用元件易于购置,具有较好的实用的价值和应用前景。
纯
发表于 06-11 14:30
明远智睿SSD2351开发板:语音机器人领域的变革力量
在人工智能快速发展的今天,语音机器人逐渐成为人们生活和工作中的得力助手。明远智睿SSD2351开发板凭借强大性能与丰富功能,为语音机器人的发展注入新动力,成为该领域的变革力量。 SSD2351
发表于 05-28 11:36
商汤科技与中国移动香港、香港中文大学法律学院签署合作备忘录
近日,商汤在香港分别与中国移动香港有限公司(以下简称“中国移动香港”)、香港中文大学法律学院签署合作备忘录,就视觉AI、大模型等领域展开深入
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
的cv_bridge库,可以轻松实现ROS图像消息与OpenCV格式的转换,这在实际开发中极为便利。
视觉巡线与二维码识别的应用
视觉巡线是机器人自主导航的经典案例,书中从仿真到真实机器人
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
《ROS 2智能机器人开发实践》内容阅读初体验
《ROS 2 智能机器人开发实践》是一本针对 ROS 2(Robot Operating System 2)这一先进
发表于 04-27 11:24
面向大学的树莓派 RemoteLab 机器人开发!
大学生远程机器人开发并非痴人说梦--在弗罗茨瓦夫科技大学,这已成为现实。在最新一期的《TheMagPi》中,RobZwetsloot与RemoteLab进行了交流。作为#MagPiMo

名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
的未来开辟了无限可能。
ROS 缘起
2007年,一群怀揣梦想的年轻人,正在斯坦福大学的机器人实验室里进行一场头脑风暴:如果可以开发一款硬件足够强大的
发表于 03-03 14:18
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
需要专业程序员进行繁琐的编程工作,这种方式不仅效率低下,还限制了机器人的应用场景。例如,在我们大学工程实训课程中使用的数控机床,需要人为设定起点、终点、移动方向和移动距离等参数,自动化程度非常有限。而
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
的进步。自2000年中国国防科技大学研制出国内第一台仿人型具身智能机器人“先行者”以来,国内在该领域的研究与开发工作逐渐加速。
“先行者”机器人
发表于 12-28 21:12
普渡机器人与香港特区政府签约成为重点企业伙伴
近日,香港特区政府引进重点企业办公室(引进办)举办第三批重点企业伙伴签约仪式。在香港特别行政区财政司司长陈茂波见证下,普渡机器人作为全球服务机器人行业的领军企业,正式成为





 工商网监
工商网监
评论