 FESTO气伺服焊钳气管接错后故障分析
FESTO气伺服焊钳气管接错后故障分析

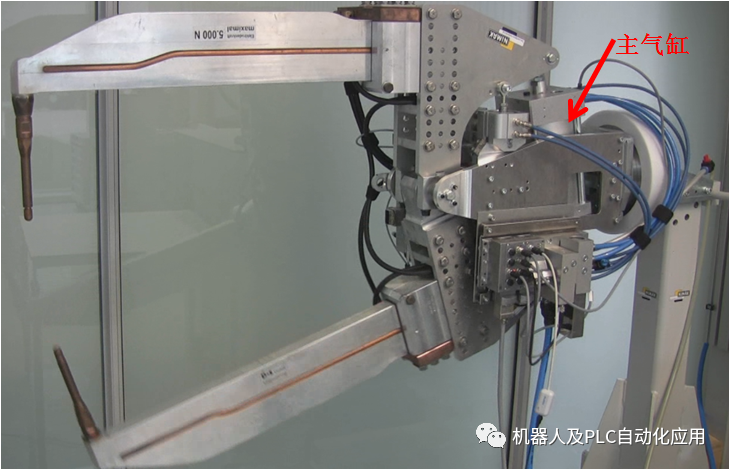
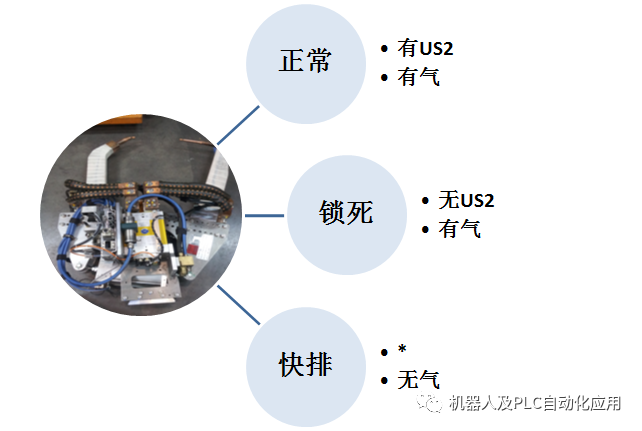
这次焊钳的气管接错,没有造成焊钳故障报警,但是在焊钳进行夹紧时出现卡顿现象.在作机器人E1轴移动时报拉拽故障.下面让我们分析一下气路.
伺服焊的第七轴(MQB)随动:
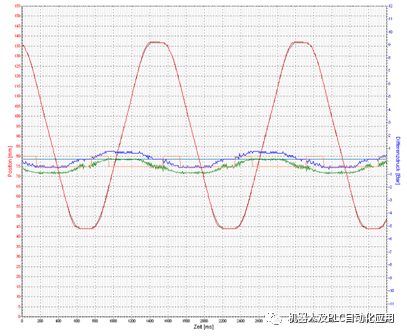
机器人运动过程中焊枪可以定位速度可在5% 到100 %之间变化机器人监控运动过程.
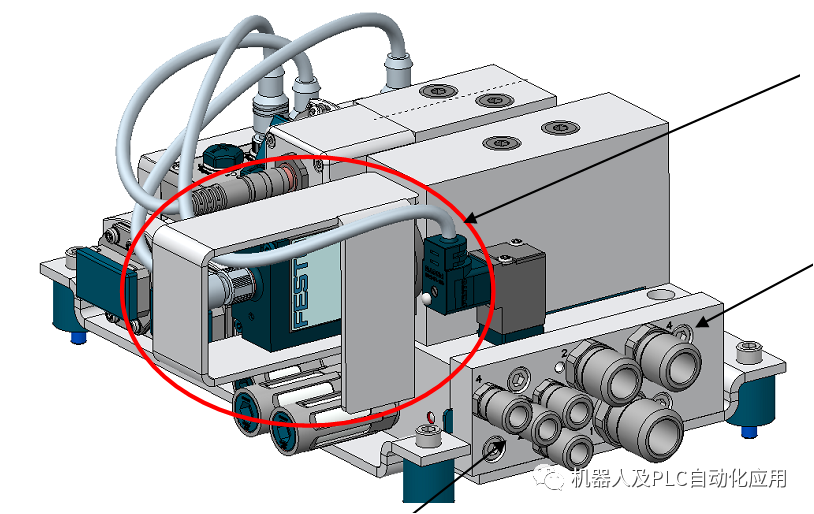
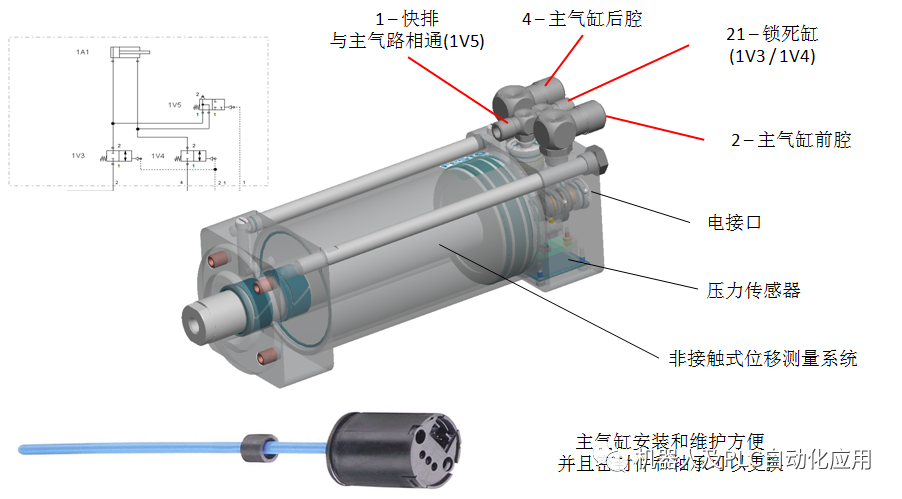
(FESTO伺服焊钳控制器)
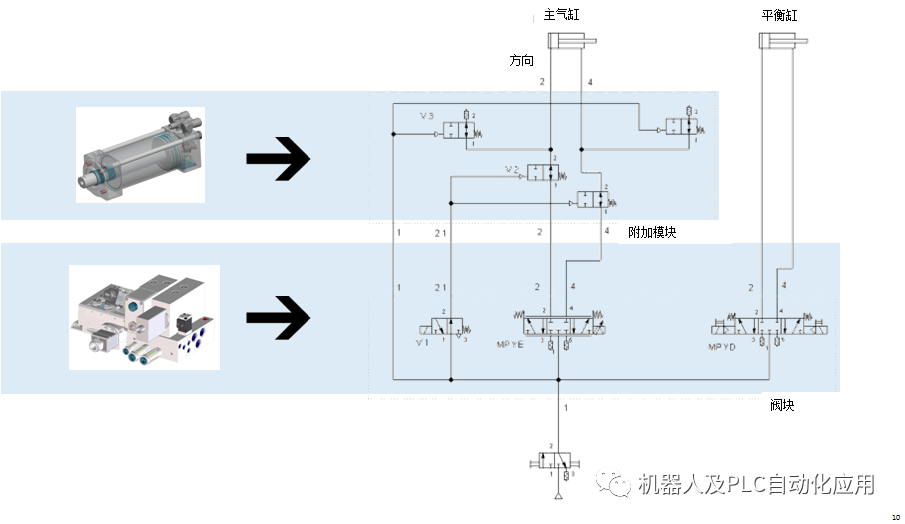
(气伺服焊钳气路图, 图中的MSEB阀与实际工作原理相反)
主气缸(C50)气管连接说明图:
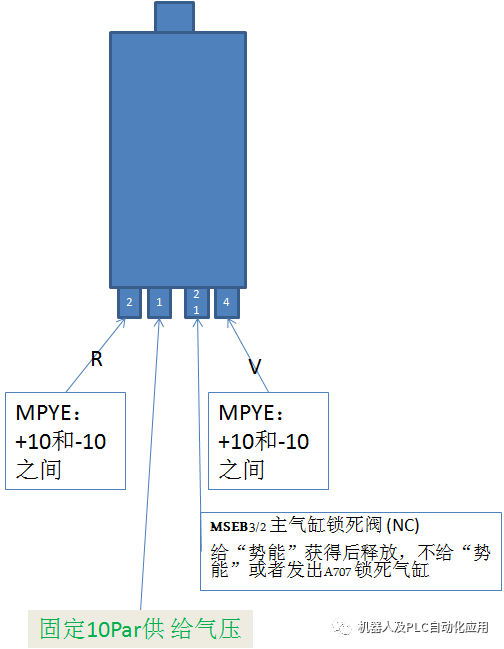
MSEB:控制锁死阀,给主气缸21的解锁压力不大
注意:阀座出气口的标号1/21是接到主气缸上的1/21的.
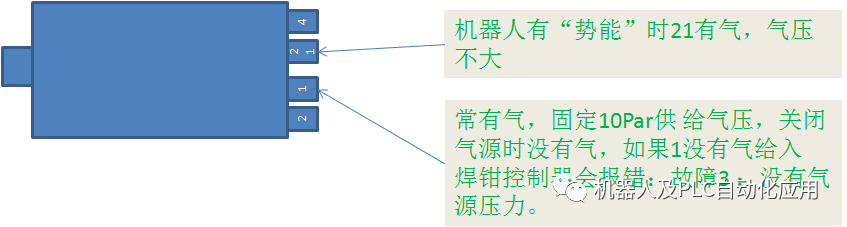
1.机器人有“势能”时21有气,气压不大(由MSEB阀控制).
2.主气缸1号管是常有气,气压很大,为10PAR气源的压力.
故障3 :没有气源压力。
主气缸气压连续4秒内小于1bar(注意:气源供给没有监控)。如果两边气腔内气压大于3bar,则该错误将自动消除。
没有E705焊钳准备就绪,E783压力过低, E784普通故障.
1.检查气源供给。检查气管连接。
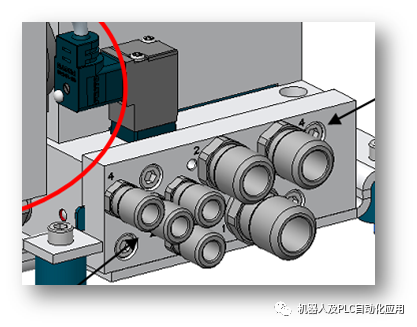
2.检查主气缸附加块(隔断阀)。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
29940浏览量
214458 -
伺服
+关注
关注
16文章
672浏览量
42014 -
festo
+关注
关注
0文章
22浏览量
5549
原文标题:FESTO气伺服焊钳气管接错后故障分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
步科倍福手拉手,ModbusTCP主转EtherCAT从,伺服压接迈入新纪元
步科倍福手拉手,ModbusTCP主转EtherCAT从,伺服压接迈入新纪元
如何应对伺服电机过热故障?
伺服电机过热故障是工业控制领域中常见的问题,为了有效应对这一故障,可以采取以下措施: 一、检查散热系统 ● 散热风扇与散热片:首先检查伺服电机的散热风扇和散热片是否正常工作。散热风扇负

伺服故障代码有哪些?哪些处理方法?
伺服故障代码有哪些?哪些处理方法?以三菱伺服驱动器为例,下面为故障代码分类及处理方法如下: 一、电源及连接类故障 ? ? ? 1. AL.E

伺服电机编码器故障及维修
伺服电机编码器故障及维修,伺服电机编码器4大常见故障,编码器信号丢失或不稳定,编码器零点偏移,编码器过热,编码器机械损坏;伺服电机编码器4大

桥接故障排除技巧
故障排除之前,了解桥接的基本原理是非常重要的。桥接设备(如交换机)在网络层(OSI模型的第二层)工作,它能够根据MAC地址学习网络中的设备位置,并在不同网络段之间转发数据帧。了解这些基本概念有助于识别和解决桥
常见伺服系统故障及解决方法
伺服系统在自动化领域中扮演着重要角色,但其运行过程中可能会遇到各种故障。以下是一些常见的伺服系统故障及其解决方法: 一、电机无法启动 故障现象 :电机无法启动,无法响应控制命令。 可能
其利天下技术·引起伺服电机故障的原因分析·伺服电机驱动方案开发
伺服电机都有它的寿命,当使用到一定程度的时候,可能会出现各类型的故障。我们今天来分析一下可能引起伺服电机故障的原因,以及解决办法。编码器报警

伺服驱动器故障及维修处理 怎样维护保养伺服电机驱动器
及时维修伺服驱动器的结构基本上与变频器的结构相同由开关电源,保护电路,PWM波隔离驱动器和三相逆变桥组成,出现故障后应及时排查各部位,找出故障原因并维修
伺服电机常见故障及解决方法有哪些
伺服电机在运行过程中可能会遇到多种故障,以下是一些常见故障及其解决方法: 一、伺服电机不转动 故障原因 : 电源未连接或接触不良。 驱动器与
常见伺服驱动器故障及维修方法
在现代工业自动化系统中,伺服驱动器扮演着至关重要的角色。它们不仅需要提供高效率的动力输出,还要确保精确的控制。然而,由于长时间的运行和复杂的工作环境,伺服驱动器可能会出现各种故障。 伺服
混合气过浓故障的诊断方法与步骤
混合气过浓故障是指发动机在运行过程中,进入气缸的混合气中燃油与空气的比例超过了理想比例,导致燃烧不完全,影响发动机性能和燃油经济性。混合气过浓故障
分接器2进1出为何电脑关机后开机无显示
分接器(或称切换器)2进1出在电脑关机后开机无显示的问题,可能由多种原因造成。以下是一些可能的原因及解决方法: 可能原因 连接问题 : 电脑与分接器之间的连接可能不良,包括电源线、视频线等。 分





 工商网监
工商网监
评论