 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
本次迭代继续该项目,从头开始构建一个简单的机械臂,并以迭代 2中的经验教训为基础。
肩部重建手术
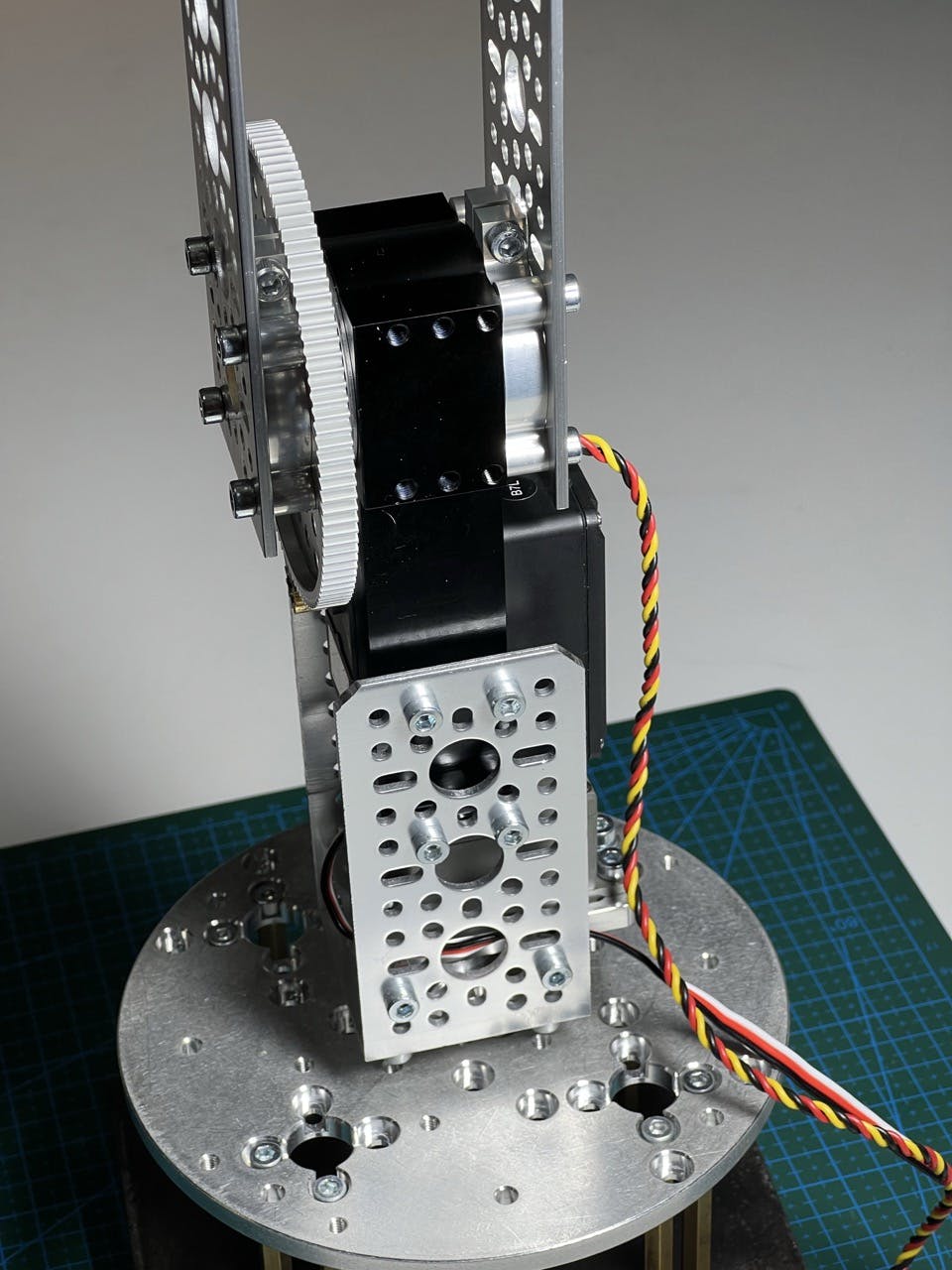
重做肩关节的目的是增加扭矩输出。新的变速箱伺服产生 118.8 kg.cm,修改后的臂距肩轴中心 40+ cm 外侧。所以执行器的肩部扭矩应该是~2.97kg.40cm(从上一次迭代中的~0.72kg.30cm增加)
齿轮箱配有 32 毫米外径 39 毫米长的法兰轴。为了让轮毂安装在反面,这被换成了一个 50 毫米长的无法兰铝管。1500 系列 1mm 塑料垫片用于防止第二个轮毂接触变速箱壳体。
肩肘链接现在由两个五孔(1123 系列)模板实现。这些板最终以大约 49 毫米的间隔分离。两个由垫片覆盖的 70mm 螺纹 M4 杆在连杆中间提供交叉支撑。
在肘关节上方和肩关节下方,手臂在结构上与迭代 1 相同。
一个重要的警告是避免过度驱动Hitec HS-788HB齿轮箱伺服。该伺服系统可以旋转七圈(2826 度)并且没有任何物理旋转停止。不要驱动低于 0.600ms 或高于 2.400ms 的 PWM 信号,否则伺服将持续旋转,内部电位器可能会根据伺服的方向与轴分离。
?
?
新传感器
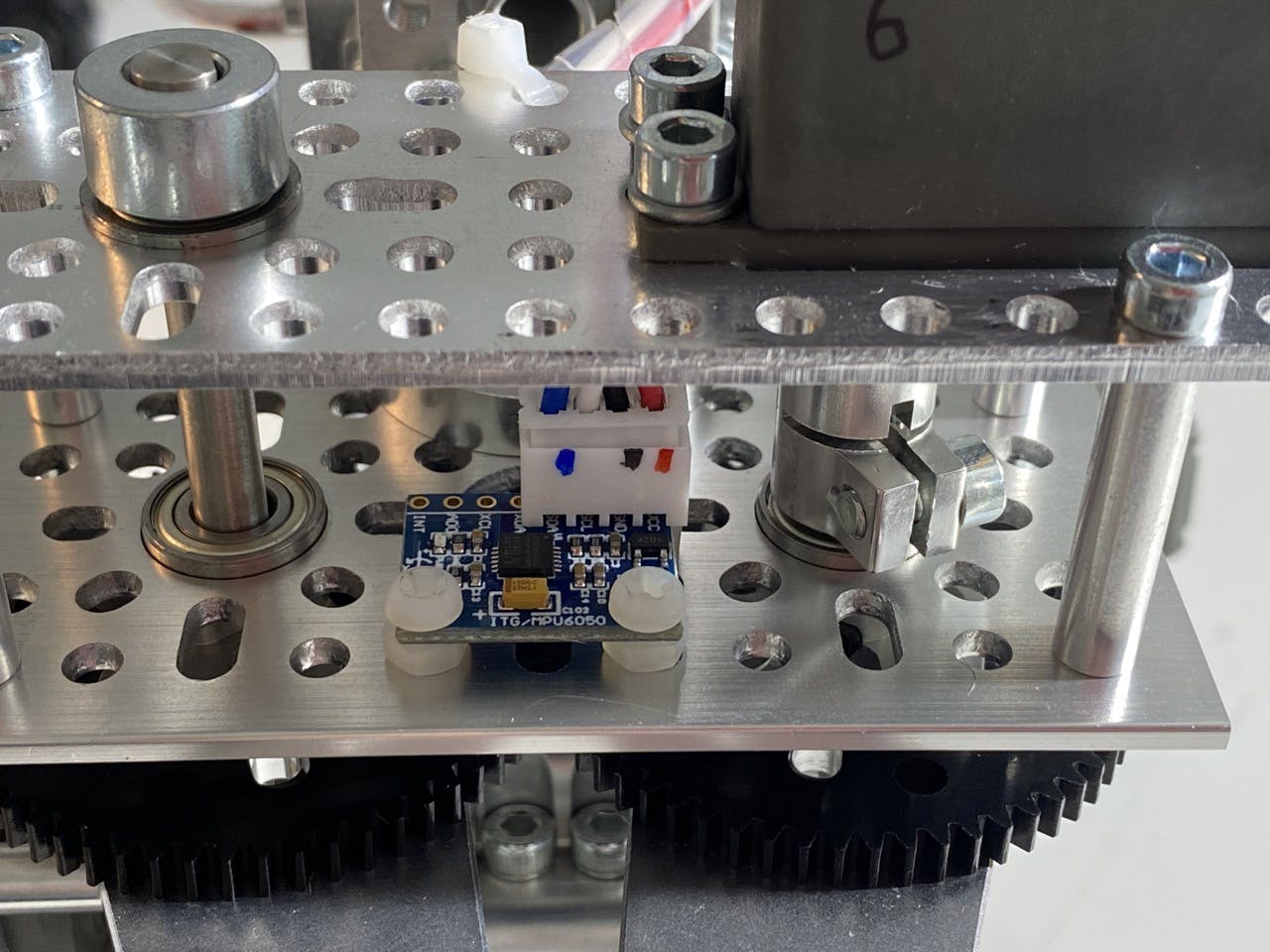
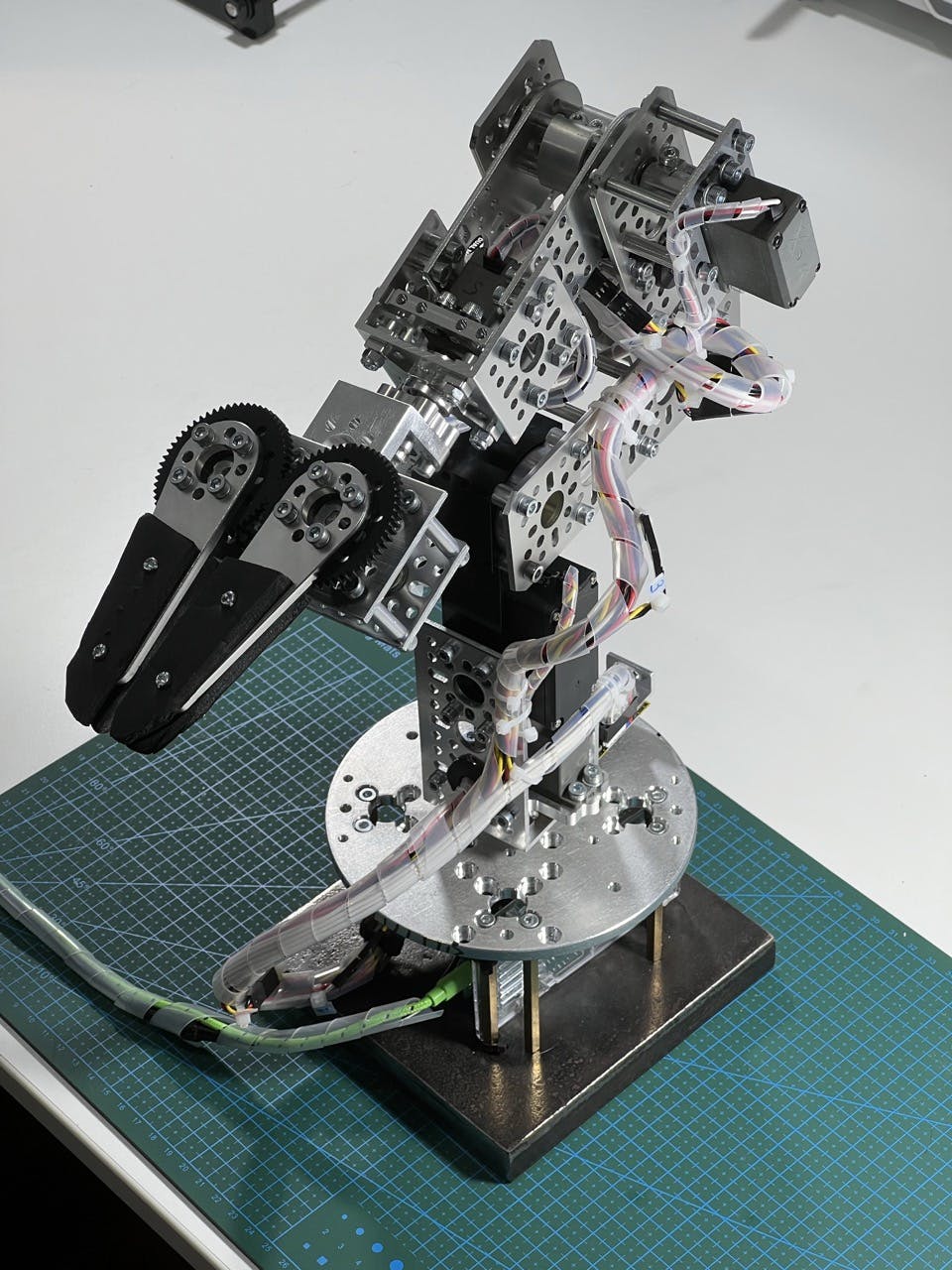
如图所示,在执行器/夹持器组件中添加了通用MPU6050 3 轴陀螺仪、3 轴加速度计。传感器是 I2C 连接的。迭代 3 的软件从传感器检索未处理的读数,但在未来的迭代中,我希望计算更多关于执行器的运动。如照片中所示,传感器 x 轴沿末端执行器定向(即,朝向照片的观看者)。
I2C 连接到 SDA1(引脚 70)SCL1(引脚 71)、3.3V 和 GND 上的 Wire1 Due 端口。
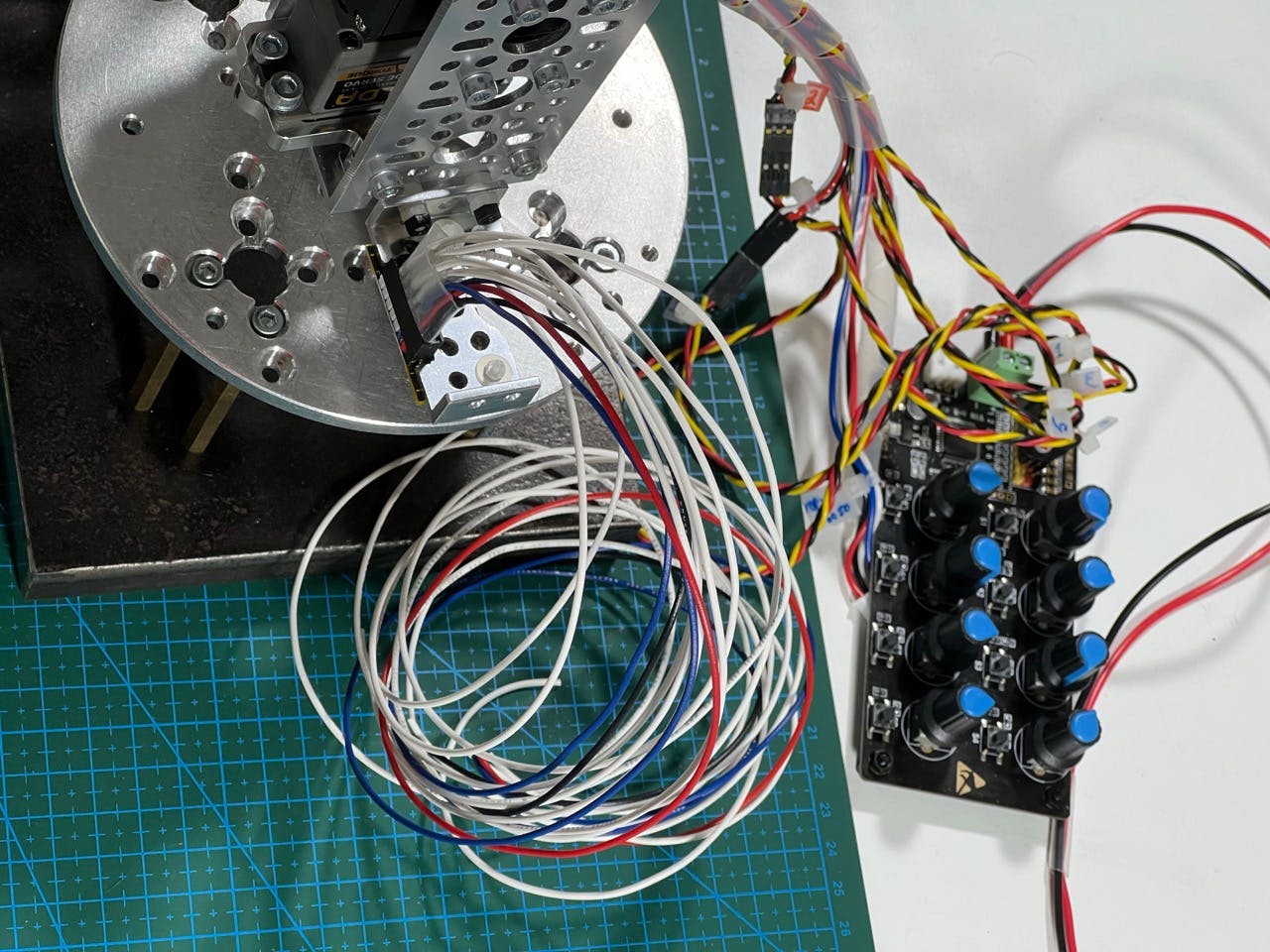
一个九轨Pololu QTRX-HD-09A 红外反射传感器阵列已安装,为未来的基本旋转绝对编码器做好准备。仅计划使用 8 条轨道。由于连接到引脚 A0-A7(八个数据通道)、5V、GND、D52(偶数控制)、D53(奇数控制)
新基地 - 镇流器
新的重型底座可防止机械臂在突然移动时翻倒。70 毫米六角支架为容纳微控制器和电子设备开辟了合适的空间。

夹持器修改
原型艺术家的泡沫板“手指套”已添加到夹具中,以延长手指长度,增加抓地力,增加手指宽度,并尝试不同形状的设计。当找到合适的设计时,未来的迭代将着眼于更坚固的材料。

新的 Arduino 代码
该项目的 Arduino 代码已在此迭代中真正启动。以前的迭代使用基于Adafruit PWM 伺服库示例的代码。这个迭代从那个开始继续。请参阅下面附件部分中项目 GitHub 存储库的链接。代码目前正在开发分支上更新,当有一些有用且稳定的东西时,它将合并到主分支。
仍在进行中的代码设计元素是:
新的测试设备
在迭代 1 和 2 之间,已经开发和获得了几种新的伺服测试方法。
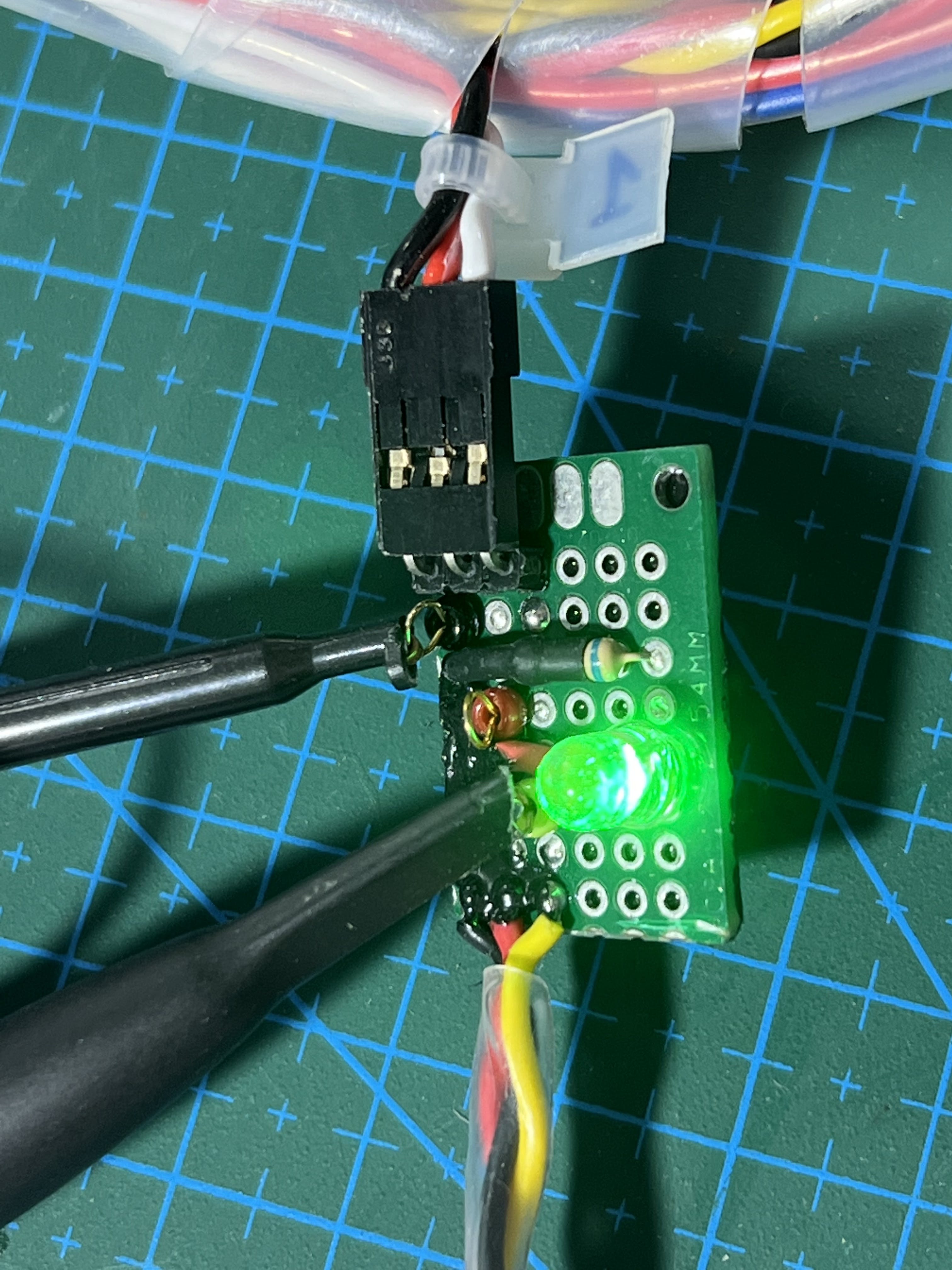
自制的 protoboard 伺服连接器分线器用于将测试点插入伺服线路。该板有一个 LED 指示灯,用于显示电机电源何时带电以及每条伺服线路(5V、GND、PWM 信号)上的测试点。这非常有用,因为示波器仍然是首选的 PWM 测试工具。
Gobilda为他们的 2000 系列伺服系统制作了伺服编程器。这是在默认模式和连续模式之间更改伺服系统所必需的(如果有用的话)。它还具有基本的 3 点测试模式和扫描模式。
我还在eBay 上购买了一个(非常)通用的八通道伺服测试控制器板。它运作良好。如上图 Pololu 传感器阵列照片所示。
完成手臂
至少在这次迭代中……它开始让我想起红矮星的Skutter 。
反射
PCA9685 模块的使用源于我的第一个 arm 项目,该项目远离 Arduino Uno 和 Braccio Shield。单独为微控制器供电的不确定性使 PCA9685 模块成为一个舒适的过渡步骤,它保持了与 Braccio Shiel d 的向后兼容性。我觉得不再需要了。Due 有很多可用的引脚。校准 PCA9685 增加了一个额外的步骤,并且 PWM 输出没有达到应有的高度准确。未来的迭代可能会回到直接从 Arduino Due 驱动伺服 PWM。
- 粒子动力机械臂开源构建
- 机械臂快递分拣系统(一)之机械臂控制程序(下位机)编写
- 最简单的机械臂
- 由MPU 6050控制的简单2轴伺服机械臂
- 迷你机械臂构建
- 工业机械臂
- 基于YOLOv3等的机械臂药盒智能抓取方法 61次下载
- 基于FuzzyP的多臂机器人机械臂控制系统 13次下载
- 机械臂手册使用说明 17次下载
- 使用SimMechanics实现六自由度的机械臂仿真研究 1次下载
- 机械臂电路设计开源合集,电机工程师们的杰作 47次下载
- 如何使用深度强化学习进行机械臂视觉抓取控制的优化方法概述 22次下载
- 液压驱动连续型机械臂原理与设计 0次下载
- 取件机械臂定位精度优化 3次下载
- 机械臂关节驱动组件 7次下载
- 使用myCobot 280机械臂结合ROS2系统搭建机械分拣站 89次阅读
- 深度解析!RK3568 加持机械臂是如何实现颜色识别与抓取的? 67次阅读
- 基于六维力传感器的机械臂自动装配应用 834次阅读
- 【开源获奖案例】四轴机械臂控制系统 1319次阅读
- 基于深度强化学习的视觉反馈机械臂抓取系统 2473次阅读
- 如何构建一个简单而逼真的模型列车控制器电路 1390次阅读
- 如何构建一个简单的基于红外的车门遥控器 1350次阅读
- 如何构建一个简单的12V至19V升压转换器电路 3267次阅读
- 如何使用NTC和PTC热敏电阻构建一个简单的温度指示电路 2982次阅读
- 一个非常容易构建的简单金属探测器电路 2975次阅读
- dfrobotArduino开发实战-遥控机械臂套装简介 2531次阅读
- MATLAB机械臂的两种路径规划 9167次阅读
- 为什么最好的机械臂是7个自由度而不是6个自由度 2.6w次阅读
- 分享最好的机械臂是7个自由度的原因 1.8w次阅读
- 基于MicroZed的五轴自动化机械臂Dexter 3443次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1DD3118电路图纸资料
- 0.08 MB | 1次下载 | 免费
- 2AD库封装库安装教程
- 0.49 MB | 1次下载 | 免费
- 3PC6206 300mA低功耗低压差线性稳压器中文资料
- 1.12 MB | 1次下载 | 免费
- 4网络安全从业者入门指南
- 2.91 MB | 1次下载 | 免费
- 5DS-CS3A P00-CN-V3
- 618.05 KB | 1次下载 | 免费
- 6海川SM5701规格书
- 1.48 MB | 次下载 | 免费
- 7H20PR5电磁炉IGBT功率管规格书
- 1.68 MB | 次下载 | 1 积分
- 8IP防护等级说明
- 0.08 MB | 次下载 | 免费
本月
- 1贴片三极管上的印字与真实名称的对照表详细说明
- 0.50 MB | 103次下载 | 1 积分
- 2涂鸦各WiFi模块原理图加PCB封装
- 11.75 MB | 89次下载 | 1 积分
- 3锦锐科技CA51F2 SDK开发包
- 24.06 MB | 43次下载 | 1 积分
- 4锦锐CA51F005 SDK开发包
- 19.47 MB | 19次下载 | 1 积分
- 5PCB的EMC设计指南
- 2.47 MB | 16次下载 | 1 积分
- 6HC05蓝牙原理图加PCB
- 15.76 MB | 13次下载 | 1 积分
- 7802.11_Wireless_Networks
- 4.17 MB | 12次下载 | 免费
- 8苹果iphone 11电路原理图
- 4.98 MB | 6次下载 | 2 积分
总榜
- 1matlab软件下载入口
- 未知 | 935127次下载 | 10 积分
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420064次下载 | 10 积分
- 3Altium DXP2002下载入口
- 未知 | 233089次下载 | 10 积分
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191390次下载 | 10 积分
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183342次下载 | 10 积分
- 6labview8.5下载
- 未知 | 81588次下载 | 10 积分
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73815次下载 | 10 积分
- 8LabVIEW 8.6下载
- 未知 | 65989次下载 | 10 积分





 工商网监
工商网监
评论