 使用myCobot 280机械臂结合ROS2系统搭建机械分拣站
使用myCobot 280机械臂结合ROS2系统搭建机械分拣站

一、引言
这篇文章是来自Automatic Addison的开源项目,已获作者授权转载自github。本项目的主要内容是使用myCobot 280机械臂结合ROS2系统搭建机械分拣站。
原文链接来自:https://github.com/automaticaddison/mycobot_ros2
作者博客: https://automaticaddison.com/create-and-visualize-a-robotic-arm-with-urdf-ros-2-jazzy/
作者在他的博客中提供了关于如何从头开始构建ROS2项目的详细教学。但是如果想快速测试该项目,可以按照下文介绍的步骤进行操作。
二、准备工作与技术介绍
1、开发环境
本教程在Ubuntu 24.04中使用ROS2 Jazzy进行了测试和验证。尽管它应该在其他环境中工作,但建议按照指定设置中的说明来获得最佳的兼容性和性能,或者使用Docker拉取镜像(在Ubuntu20.04中成功测试)。请确保RViz、MoveIt、Gazebo和其他组件的正确配置正确,以减少不必要的错误。本文所使用的编译语言为Python。
2、技术介绍
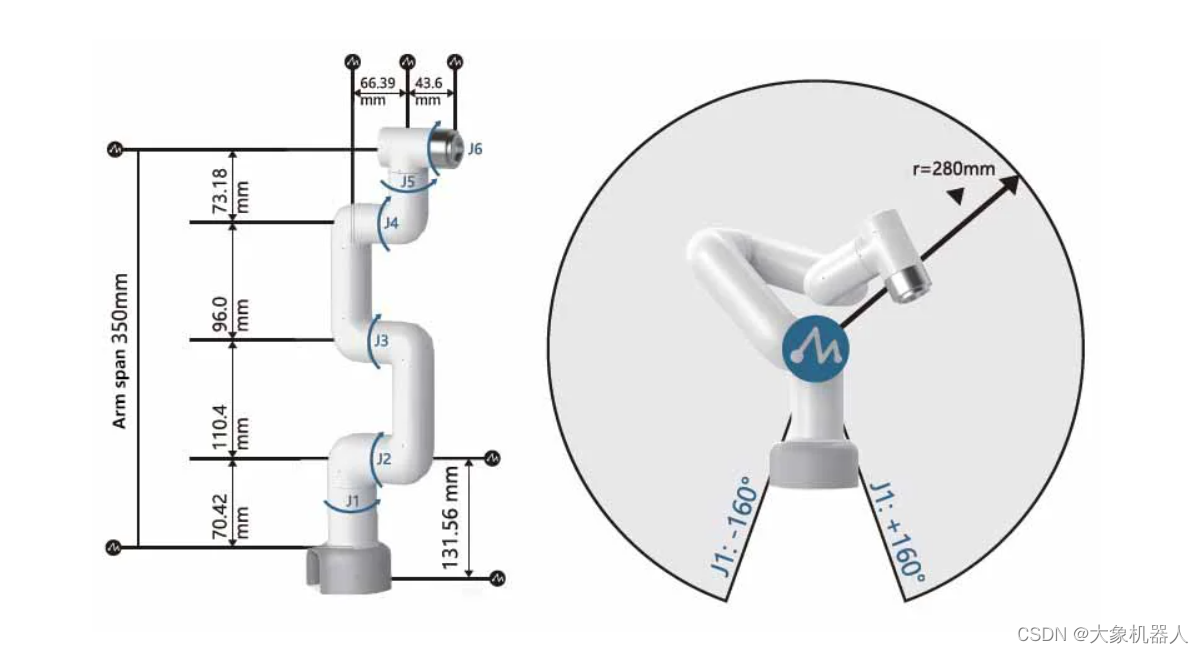
myCobot 280系列简介:myCobot 280系列机械臂是专门为研究、教育、技术应用和商业展览而开发的6-DOF协作机器人。由于它们是轻量级的桌面机械臂,因此它们非常适合所有年龄段的开发人员来学习和探索机器人技术。我们为开发人员提供了开源的机械臂urdf模型来使用。
ROS1: https://github.com/elephantrobotics/mycobot_ros
ROS2: https://github.com/elephantrobotics/mycobot_ros2
三、项目运行
1、复制项目
mkdir ~/ros2_ws/ Cd ~/ros2_ws/ git clone https://github.com/automaticaddison/mycobot_ros2
如果你不熟悉ROS2或者不了解具体文件夹中的内容,可以参阅这篇文章https://automaticaddison.com/naming-and-organizing-packages-in-large-ros-2-projects/或者重新学习有关ROS2的内容。
2、拉取镜像(使用Docker)
确保你的Docker是可以使用的,然后使用Ctrl+Alt+T来打开新的终端,输入需求并按下Enter。
cd ~/ros2_ws/mycobot_ros2/docker/ bash build.sh
如果你的terminal运行成功,将会显示这样的页面
3、开始运行Container
docker-compose up --build
如果你的terminal运行成功,将会显示这样的页面
Ctrl + C
停止测试并继续
docker-compose up -d manipulation
 如果你的terminal运行成功,将会显示这样的页面?
如果你的terminal运行成功,将会显示这样的页面?
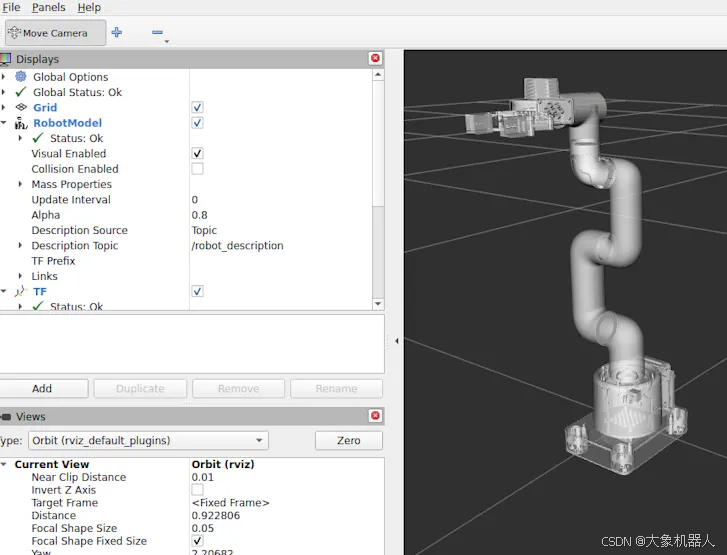
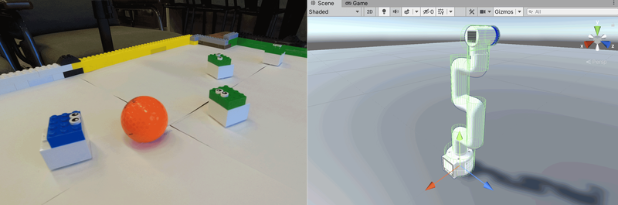
4、在Rviz中测试机械臂
xhost + docker-compose exec manipulation bash ros2 launch mycobot_description robot_state_publisher.launch.py
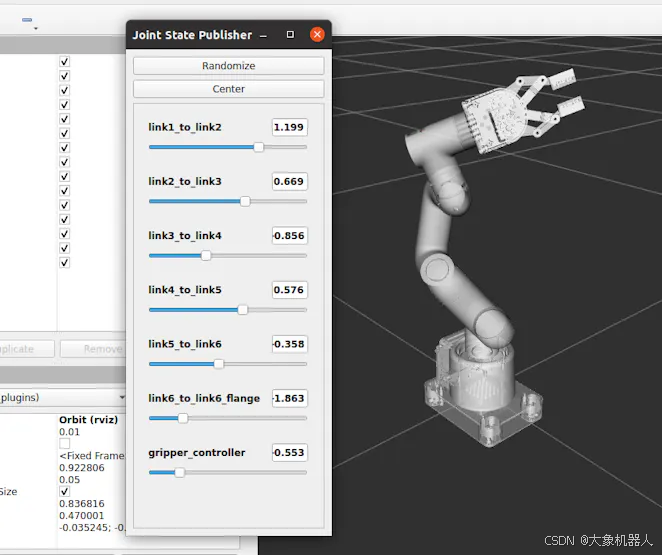
可以使用 SliderBars 调整机器人和机械爪的状态
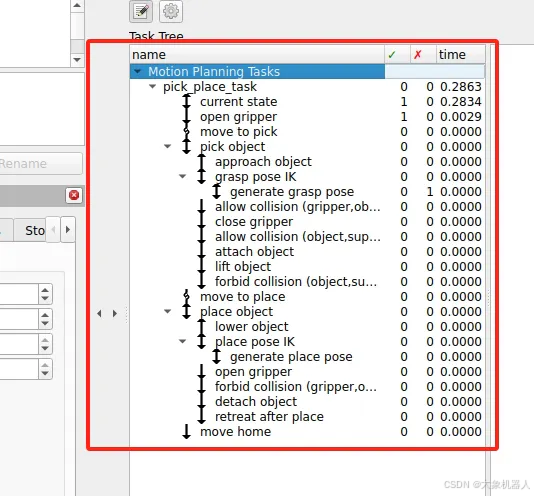
5、测试运动规划任务
确保你仍然处于Dicker的container中,然后打开终端
echo "alias pointcloud='bash ~/ros2_ws/src/mycobot_ros2/mycobot_mtc_pick_place_demo/scripts/pointcloud.sh'" >> ~/.bashrc echo "alias pick='bash ~/ros2_ws/src/mycobot_ros2/mycobot_mtc_pick_place_demo/scripts/robot.sh'" >> ~/.bashrc
然后按下Enter来激活演示
pick
还可以在Rviz中学习更多运动规划项目
四、 总结
再次感谢作者Addison。虽然本文是以用户身份对项目进行快速安装和测试,但Addison 提供了从 ROS2 安装到项目施工的详细讲解和教程,他的文章也非常适合想要系统完整地学习 ROS2的初学者(https://automaticaddison.com/tutorials/ )。
如果你想用真实的机械臂测试这个模拟项目,myCobot 280 系列非常适合你。如果你有其他关于机械臂使用的好的想法想要实现的话,也欢迎在下方留言和我们沟通,你的点赞和留言是对我们最大的支持!
-
机器人
+关注
关注
213文章
29829浏览量
213597 -
开源
+关注
关注
3文章
3754浏览量
43981 -
Ubuntu
+关注
关注
5文章
595浏览量
31516 -
机械臂
+关注
关注
13文章
556浏览量
25439 -
大象机器人
+关注
关注
0文章
86浏览量
144
原文标题:使用myCobot 280机械臂结合ROS2系统CH成功搭建机械分拣站!
文章出处:【微信号:ElephantRobotics,微信公众号:大象机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
myCobot 280 2023全新功能,手柄控制、自干涉检测

使用myCobot 280 Jeston Nano进行物体精确识别追踪
结合大象机器人六轴协作机械臂myCobot 280 ,解决特定的自动化任务和挑战!(下)

系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
六轴机械臂免费使用,学习ROS、Python火热报名中
myCobot机械臂应用于Unity机器人编程实战课

Mycobot机械臂各关节的运动(三)
使用 Python 和可视化编程控制树莓派机械臂myCobot


开源六轴机械臂myCobot 280末端执行器实用案例解析

结合大象机器人六轴协作机械臂myCobot 280 ,解决特定的自动化任务和挑战!(上)
如何使用PLC控制myCobot 320机械臂






 工商网监
工商网监
评论