 ���ڵ���Ԫ��PID����ʵ��
���ڵ���Ԫ��PID����ʵ��

������һ�ֵ���Ԫ����Ӧ���Ƶķ���������������ߵ����ķ������÷����ṹ�������ڷ�ɢ����ϵͳ��ʵ�֡�
0 ����
�ڹ�ҵ���̿����У�PID��������ʷ���ƾá���������ǿ�Ŀ��Ʒ�ʽ������Ҫ����Ϊ���ֿ��Ʒ�ʽ����ֱ�ۡ�ʵ�ּ�³�����ܺõ�һϵ���ŵ㡣�ڻ�糧��ɢ����ϵͳ�У������뵥�����SISO��������PID���ƹ��ɡ��Ŀ��ƻ�·һ��ռ80%���ϡ����ǣ������ȹ������д�ʱ�ӡ�����Ե����ԣ�ʹ�ù��ɹ���ʱ��䳤������Ʒ�ʱ����⣬���ڸ߽�����ǿ������̣�PID����������ƶ��������ѡ������������������ܵ����ƣ��Լ�����Ķ�̬�������Ź����������ȱ仯�������仯��PID�����������Դﵽ����״̬��
Ϊ�ˣ��������һ�ֵ���Ԫ����Ӧ���Ƶķ�����ͨ������������ʵ��������÷��������У����б���ͨPID�㷨�õö�Ŀ���Ч������
1���ڵ���Ԫ������Ӧ����
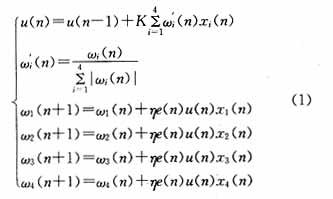
��Ԫ�������ź���4������ɣ�ǰ�������ź�x1��t�����������������ź�x2��t���������ֿ��� �ź�x3��t�����������ֿ����ź�x4��t��������һ�ֶ��ζ�ģʽ�Ŀ��ƽṹ����ǰ���ͷ�����һ�壬��Ϊ��������Ϊ������ǰ�������ź�x1��t��ͨ���ء�1��t�� ֱ���������ܿض��ӿ���ϵͳ����Ӧ�ٶȣ�x2��t����Ѹ�ټ�С������x3��t�� ���Ը���ϵͳ����Ӧ�ٶȣ���С��������x4��t�� ʹϵͳ��������̬�����˿��Ƶ�ȷ�ԡ�Ȩֵ�ء�i��t����i=1��2��3��4����ӳ���ܿض�����̵Ķ�̬���ԣ���Ԫͨ��������ѧϰ���Բ�ͣ�ص����ء�i��t����i=1��2��3��4������4�ֿ��ƵĹ���������Ѹ������ƫ�������̬��
Ȩֵ�������������мලHebbѧϰ�㷨��2�ݣ�ͬʱΪ�˱�֤ѧϰ�㷨�������ԺͿ��Ƶ�³���ԣ��ɲ��ù淶����ѧϰ�㷨�������㷨����ʽ��
2����ʵ���о�
���е���Ԫ����Ӧ���Ʒ���ʵ�飬ʵ������ͼ2��PID�IJ���Ti���ĺ�Td��ͨ��Ѱ�ŵõ������Ų�������t=0.56 sʱ����һ�����š��ɼ�����Ԫ����Ӧ���Ʊ���ͨPID������Ӧ�ٶȿ죬����Ч���á�
�����ķ���ʵ���������������ѧϰ���ʦǶԿ���Ч����Ӱ�첻���ԡ�K����Ԫ�ı���ϵ�������Կ����Ŵ����ϴ���ܿض�������˥����Ԫ����Ч��������ѧϰ���̵ij�������ã����Կ����Ŵ�����С���ܿض������������ǿ��Ԫ����Ч������֤��Ԫ��ȫ�ַ�Χ��������E����r��t��-y��t����2�� ����Сֵ�����á�����ʵ�������Kȡ�Ľϴ�ʱ��ϵͳ��̬�����죬������������ʱ�䳤��Kȡ�Ľ�Сʱ��ϵͳ��Ӧ�������������½��������Kȡ��̫С������Ӧ���ٲ��ϸ����źš�
��K�ķ���������Ӧ������Ӧ����ȡ�ϴ��ֵ���������Ӧ�ٶȣ����ڽ�����̬�Ժ�KӦ���ٵ�ijһ�ȶ�ֵ���Ա�֤ϵͳ�����ֹ���ij�������Ϊ����������Ҫ���Բ��÷����Ա任����K���������ģ�������ʽ���£�

ʽ�У�K0ΪK����ֵ̬����Ϊ������������ֵ�ӿ���Ч�����е�����ȡƫ���3�η���ʹƫ��ϴ�ʱK�ϴ�������Ӧ�ٶȣ���ƫ���Сʱ����һ����������ã��Լ�С��������
Ҳ���Բ������¼ķֶ����Ի�����������K��

������ƽ�����G��s��=��0.325s+1��-1����0.5s+1��-1 ���е���Ԫ����Ӧ���Ʒ���ʵ�飬ʵ������ͼ3����t=5.6 sʱ��һ�����š��ɼ����Ƶ���Ӧ�ٶȽ�һ���ӿ졣
3����
�����������Ԫ����ӦԤ��PID���������ܹ���߿���ϵͳ������Ӧ������³���ԣ��ÿ������ṹ������ʵ�֣��ر��DZ����ڷ�ɢ����ϵͳ��ʵ�֡�
-
PID����
+��ע
��ע
10����
461�����
41340 -
��Ԫ
+��ע
��ע
1����
368�����
18879
������������ ��¼
��ˢֱ���������Ԫ����Ӧ��������ϵͳ
��ˢֱ���������ԪPI�����������
PID����������ͬ����������������е�Ӧ��
��Ӳ����·ȥʵ��PID������

PID�����㷨��C����ʵ����PID�㷨ԭ��
BP�����������ṹ���ԭ��
BP�����������������ıȽ�
BP�������ʵ���������
���ѧϰ���ţ���������Ĺ�����ʵ��
�����������봫ͳ������ıȽ�
���ʹ��Pythonʵ��PID����
��ε���PID���� PID�������ĵ��Է���
ʲô��PID�����봫ͳ����������
���ھ��������磬��Щ������������ô~
���Ŵ�ѧ �C �ù�����ϸ���Ͷ���






 ��������
��������
����