 基于RT-Thread与英飞凌Psoc6-evaluationkit-062S2的智能触摸与手势系统 | 技术集结
基于RT-Thread与英飞凌Psoc6-evaluationkit-062S2的智能触摸与手势系统 | 技术集结

目录
电容触摸界面
手势识别
网络同步
RTduino使用
使用方法
项目源码
1 电容触摸界面
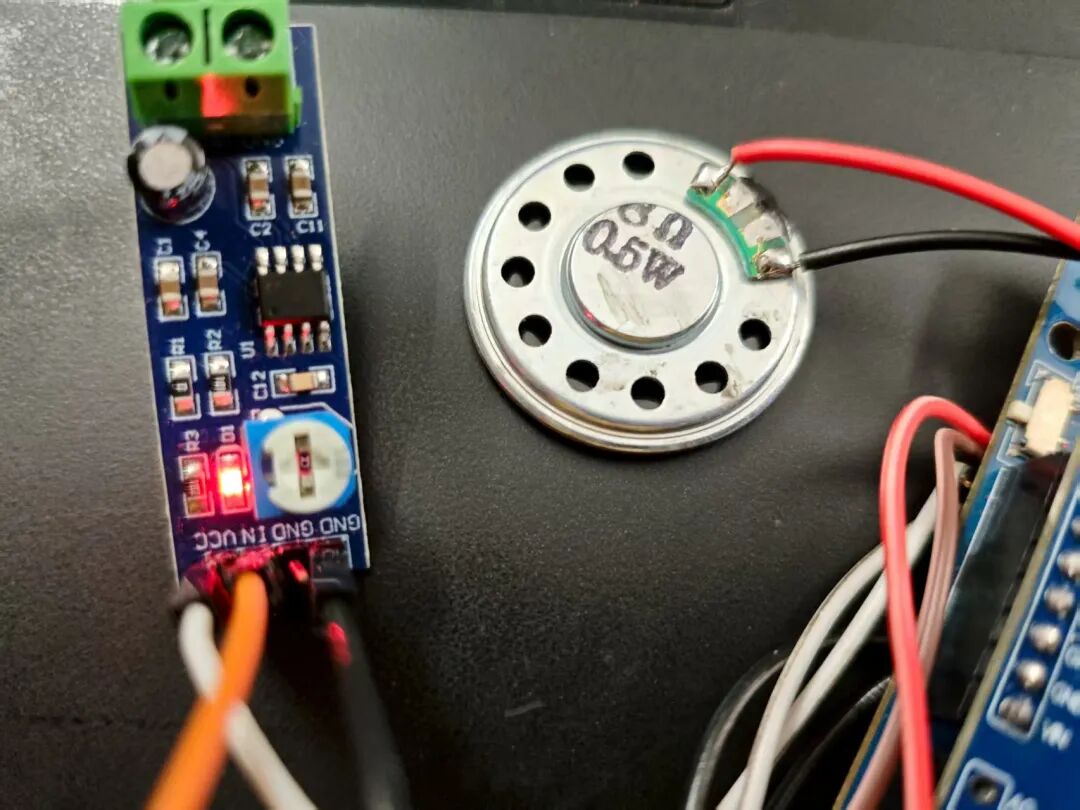
利用 Psoc6-evaluationkit-062S2 的 CapSense 模块设计一个交互式触摸面板。
可以通过触摸面板调 整PWM的频率使蜂鸣器播放不同的音调(需要映射do (1), re (2), mi (3), fa (4) 音符)+ 调整 PWM 信号的占空比控制 LED 指示灯。
1.1 Capsense触控
在Slider例程上修改,根据触摸位置(x)判断音符、手势
slider_touch_info = CyCapSense_GetTouchInfo(CY_CAPSENSE_LINEARSLIDER0_WDGT_ID, &cy_capsense_context); slider_touch_status = slider_touch_info->numPosition; slider_pos = slider_touch_info->ptrPosition->x; intx=slider_pos; if(RT_NULL != slider_touch_status) { intsenor_id=detect_sensor_id(); char*gesture=detect_gesture(x); intnow_note_id=detect_note(x); screen_show_info(now_note_id,senor_id,gesture); rt_event_send(&buzzer_event, EVENT_TOUCH); message_json(senor_id, gesture); }
获取sensor id,逐个判断是否激活,返回id
Cy_CapSense_IsSensorActive(CY_CAPSENSE_LINEARSLIDER0_WDGT_ID,i,&cy_capsense_context
intdetect_sensor_id(){ for(int i=0;i<4;i++)? ? {? ? ? ? if(Cy_CapSense_IsSensorActive\(CY_CAPSENSE_LINEARSLIDER0_WDGT_ID,i,&cy_capsense_context))? ? ? ? {? ? ? ? ? ? return?i;? ? ? ? }? ? } ?}
10ms扫描一次
voidloop(void){ /* put your main code here, to run repeatedly: */ rt_sem_take(trans_done_semphr,RT_WAITING_FOREVER); /* Process all widgets */ Cy_CapSense_ProcessAllWidgets(&cy_capsense_context); /* Process touch input */ process_touch(); /* Establishes synchronized operation between the CapSense * middleware and the CapSense Tuner tool. */ Cy_CapSense_RunTuner(&cy_capsense_context); /* Initiate next scan */ Cy_CapSense_ScanAllWidgets(&cy_capsense_context); rt_thread_mdelay(10);}
1.2 音调播放
改变pwm设置播放音调,求出周期,设置20%的占空比
intnotes[] = {1,262,294,330,349,392,440,494};structrt_eventbuzzer_event;//int pre_note=0;voidset_notes(inti){ uint32_tperiod_ns =1000000000/ notes[i];// ns uint32_tpulse_ns = period_ns *0.2; // 20% rt_pwm_set(buzzer_pwm, PWM_DEV_CHANNEL, period_ns, pulse_ns); rt_pwm_enable(buzzer_pwm, PWM_DEV_CHANNEL);}
没触摸0.2s后停止播放
voidbuzzer_entry(void*parament){ rt_uint32_t e; while(1) { if(rt_event_recv(&buzzer_event,EVENT_TOUCH,RT_EVENT_FLAG_AND|RT_EVENT_FLAG_CLEAR,0,&e)!=RT_EOK) { rt_pwm_disable(buzzer_pwm,PWM_DEV_CHANNEL); } rt_thread_mdelay(200); }}
1.3 屏幕显示
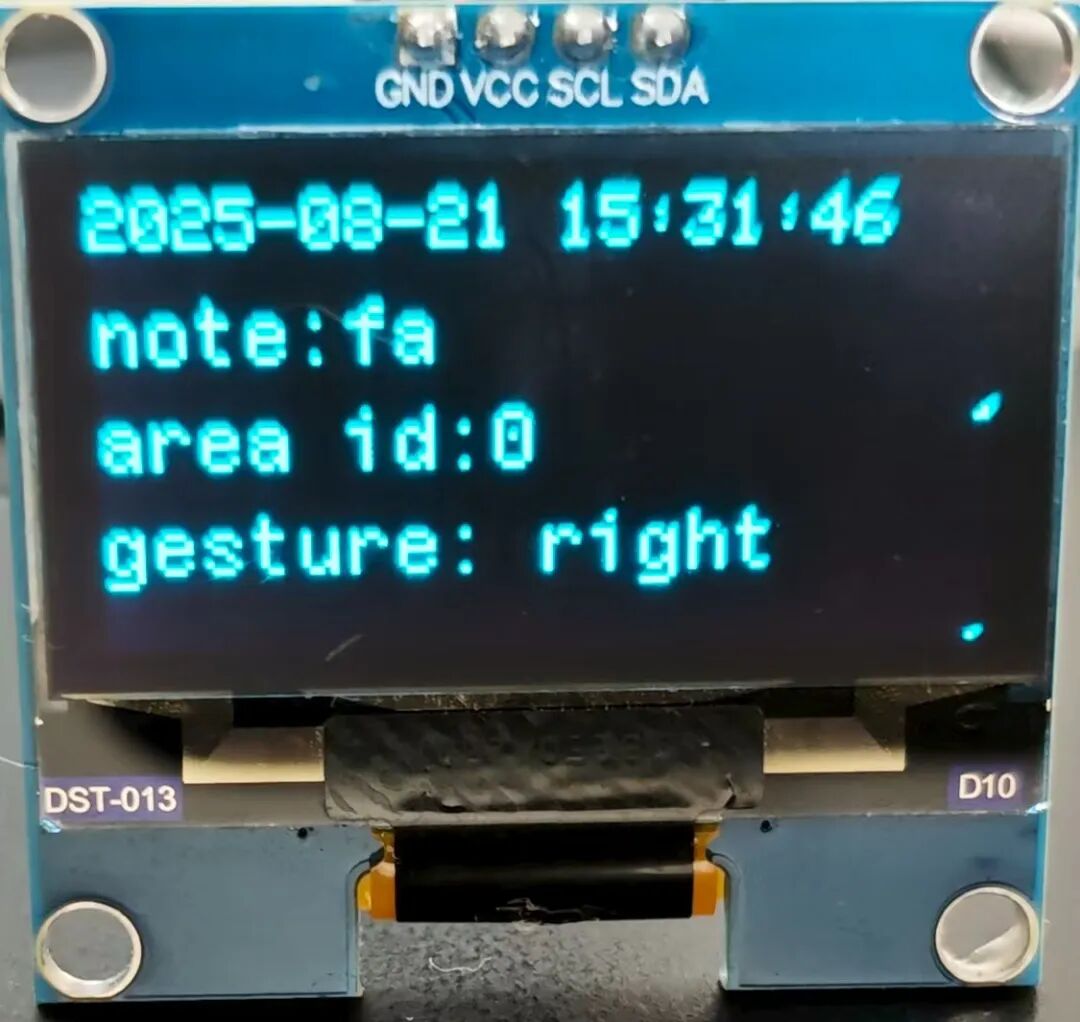
触摸响应时间必须≤100ms,并且触发的命令须显示在 OLED 屏幕上(分辨率≥128x64 像素),并清晰标识触摸区域和操作。
使用ssd1306软件包,分别显示了音符,触摸区域id,手势
voidscreen_show_info(intnote,intid,char *gesture){ rt_mutex_take(screen_mutex, RT_WAITING_FOREVER); ssd1306_SetCursor(2,15); ssd1306_WriteString(note_str[note], Font_7x10, White); ssd1306_SetCursor(20,15); ssd1306_WriteChar(id+'0', Font_7x10, White); ssd1306_SetCursor(2,30); ssd1306_WriteString(gesture, Font_7x10, White); ssd1306_UpdateScreen(); rt_mutex_release(screen_mutex);}
显示时间
voidscreen_show_time(char *time){ rt_mutex_take(screen_mutex,RT_WAITING_FOREVER); ssd1306_SetCursor(2,0); ssd1306_WriteString(time,Font_6x8,White); ssd1306_UpdateScreen(); rt_mutex_release(screen_mutex);}
1.4 LED随滑动控制
可以通过触摸面板调整PWM的占空比控制 LED 指示灯的亮度。
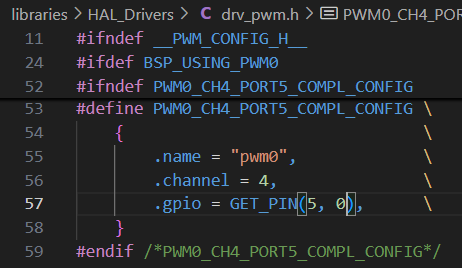
使用pwm
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, 1 * 1000 * 1000, GET_DUTY_CYCLE(brightness)); }
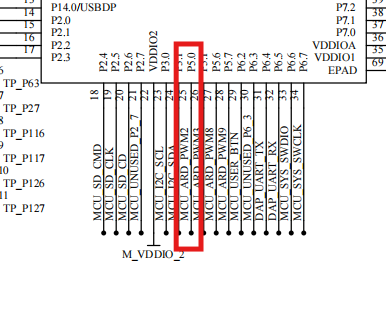
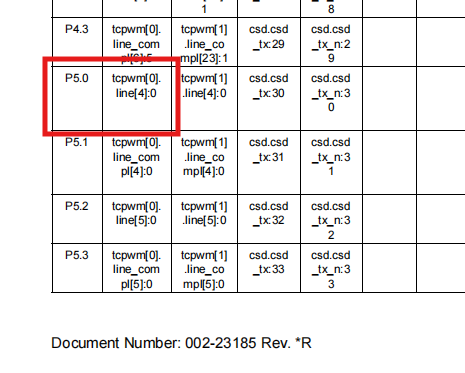
可以更改其它引脚
2 手势识别
使用 CapSense 模块实现 2 种不同手势的识别(向左滑动、向右滑动)。
由于本开发板上的是slider线性滑条,在CapSense组件中,只有触摸板widget支持手势功能。所以通过记录最近3次触摸位置(x),简单判断是否为手势
char *detect_gesture(int num){ staticintval[3] = {0}; val[0] =val[1]; val[1] =val[2]; val[2] = num; rt_kprintf("val: %d %d %d\n",val[0],val[1],val[2]); char *gesture =""; if(ORDER(val[0],val[1],val[2])) { rt_kprintf("left\n"); gesture ="left "; } elseif (ORDER(val[2],val[1],val[0])) { rt_kprintf("right\n"); gesture ="right"; } else { gesture =" "; } returngesture;}
3 网络同步
通过网络模块使用MQTT协议同步NTP时间并显示到OLED上(格式:YYYY-MM-DD HHMMSS)。并将触摸和手势数据(包括:触摸区域 ID、手势类型)传输到服务器端显示。
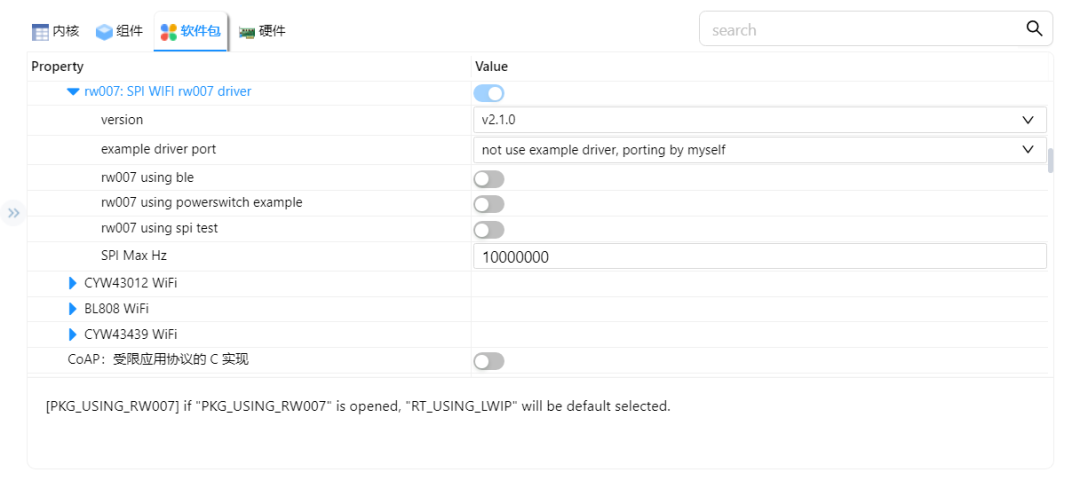
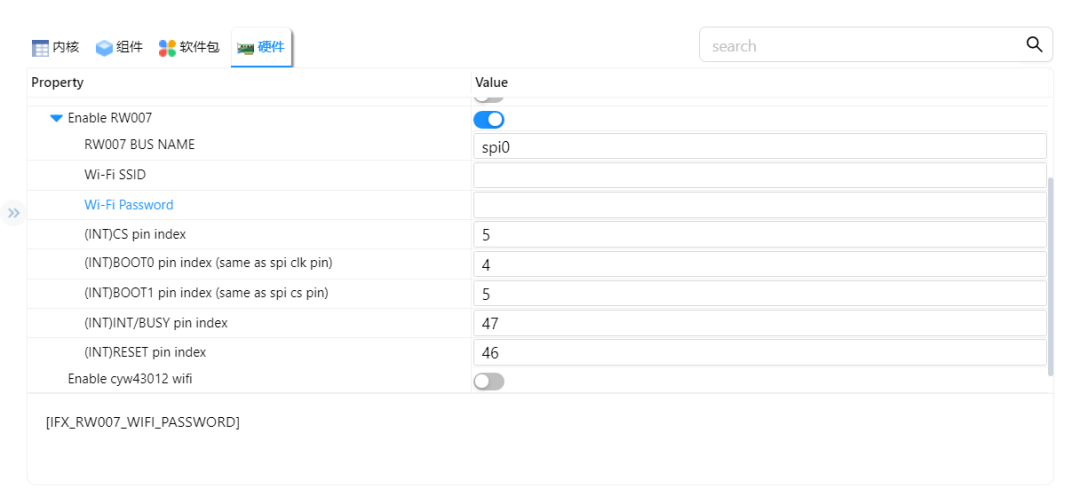
3.1 rw007
3.2 mqtt
使用pahomqtt软件包, 使用参考样例的mqtt_start函数
设置好topic等宏
#defineMQTT_URI"tcp://broker.emqx.io:1883"#defineMQTT_SUBTOPIC"abc/sub"#defineMQTT_PUBTOPIC"abc/pub"#defineMQTT_WILLMSG"Goodbye!"#defineMQTT_USERNAME"name"#defineMQTT_PASSWORD"password"
可以等待网络连接后再连接mqtt
intcheck_network(void){ structnetdev *netdev =netdev_get_by_family(AF_INET); return(netdev &&netdev_is_link_up(netdev)/* && netdev_is_internet_up(netdev) */);}
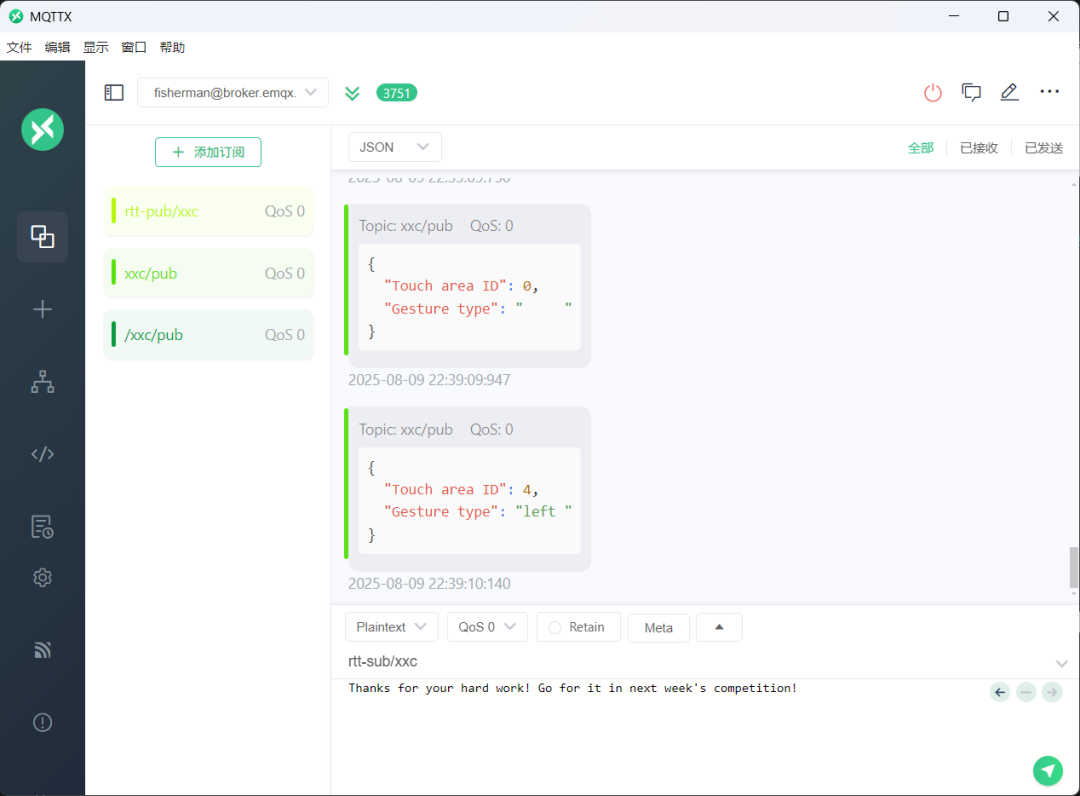
用RyanJson软件包生成json数据,mqtt发送到相应的topic
char*message_json(inttouch_area_id,char*gesture_type)
{ RyanJson_t root; root =RyanJsonCreateObject(); RyanJsonAddIntToObject(root,"Touch area ID", touch_area_id); RyanJsonAddStringToObject(root,"Gesture type",gesture_type ); rt_uint32_tlen; tmp_json =RyanJsonPrint(root,650, RyanJsonTrue, &len); intret =paho_mqtt_publish(&client, QOS1, MQTT_PUBTOPIC, tmp_json); rt_kprintf("json:%s\n",tmp_json); RyanJsonDelete(root); returntmp_json;}
3.3 ntp
在netutils软件包中使能ntp
每秒更新时间
staticvoidtime_thread_entry(void *parameter){ structtm *tm; while(1) { //获取当前时间 time_t now =time(NULL); tm =localtime(&now);//使用UTC时间 strftime(time_buf, sizeof(time_buf),"%Y-%m-%d %H:%M:%S", tm); screen_show_time(time_buf); //线程睡眠1秒钟 rt_thread_mdelay(1000); }}
4 RTduino使用
4.1 RT-Thread多任务集成
利用 Psoc6 的 RTduino 支持(RT-Thread 的 Arduino 兼容生态系统)来实现实时触摸和手势处理
4.2 使用.c文件中的函数
applications/arduino_main.cpp: :undefinedreference to`'
在arduino_main.cpp中调用其它文件的函数时,提示说未定义,要在对应头文件中添加extern "C"
#ifdef__cplusplusextern"C"{#endif#ifdef__cplusplus}#endif
5 使用方法
5.1 线程使用
buzzer线程,用于停止播放音调
time线程,用于更新屏幕显示时间
rtduino loop,用于触摸识别,与数据处理显示
mqtt线程,用于等待网络连接和启动mqtt客户端
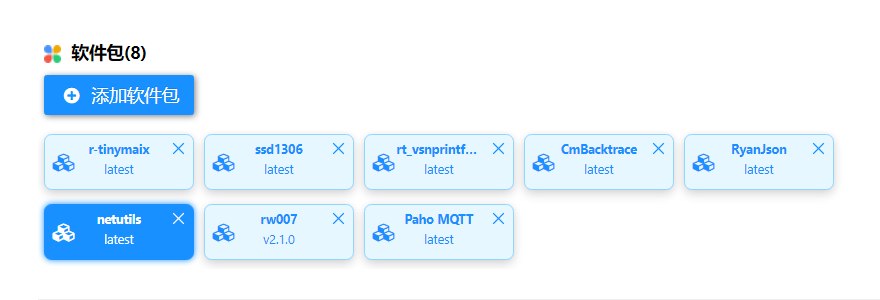
5.2 软件包使用
6 项目源码
Gitee仓库地址(https://gitee.com/dgjames/psoc6project)
RT-Thread Github 开源仓库,欢迎撒个星(Star)支持,更期待你的代码贡献:https://github.com/RT-Thread/rt-thread
-
英飞凌
+关注
关注
68文章
2388浏览量
141342 -
触摸
+关注
关注
8文章
200浏览量
65332 -
RT-Thread
+关注
关注
32文章
1465浏览量
42727 -
psoc6
+关注
关注
1文章
10浏览量
5123
发布评论请先 登录
PSoC6-CY8CKIT-062S2-43012开发板简介
【资料下载】英飞凌PSoC 6 RTT物联网开发板
【英飞凌PSoC 6 RTT开发板试用】
【英飞凌PSoC 6 RTT开发板试用】以搭积木方式实现简单的互联型家庭网关
【英飞凌PSoC 6 RTT开发板试用】+开箱测试
RT-Thread文档_英飞凌 Psoc6-CY8CKIT-062S2-43012上手指南

英飞凌联合 RT-Thread 发布 PSoC? 62 with CAPSENSE ? evaluation kit开发板
基于RT-Thread的家庭智能家居系统的控制平台设计
基于PSOC6开发板构建的智能小车
如何设计一种基于PSOC6的人体交互式智能家居系统呢?

英飞凌Psoc6-evaluationkit-062S2测评1_LED
【PSoC?62 for RT-Thread】RT-Thread携手英飞凌举办嵌入式网络应用开发沙龙,圆满落幕!

RT-Thread开发者大会系统控制分论坛动手实践指南
【英飞凌测评】英飞凌PSoC? 62开发板试用报告-LCD ILI9341 8080 DEMO
基于PSOC6的智能环境监控系统






 工商网监
工商网监
评论