 自主工具链助力端到端组合辅助驾驶算法验证
自主工具链助力端到端组合辅助驾驶算法验证

算法介绍
传统组合辅助驾驶算法一般分为感知定位、决策规划、控制三部分功能,将传感器数据输入后,经算法处理,输出控制指令。传统组合辅助驾驶算法中的决策规划模块,通过规则代码迭代来应对不同场景,无法彻底解决越来越多的长尾问题。
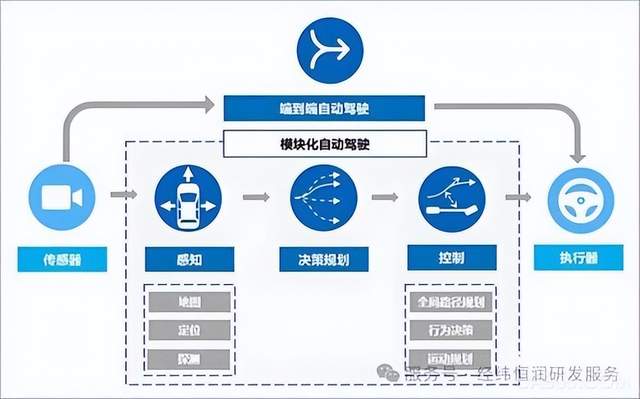
图 1 辅助驾驶算法(图片来源网络)
端到端辅助驾驶算法是一种深度学习算法,该算法将传感器数据输入后,基于大模型直接输出车辆控制指令。端到端辅助驾驶算法采用一体化黑盒模型,通过数据驱动,解决长尾问题。数据量越大,算法的泛化能力就越强,能够应对的场景就越多。
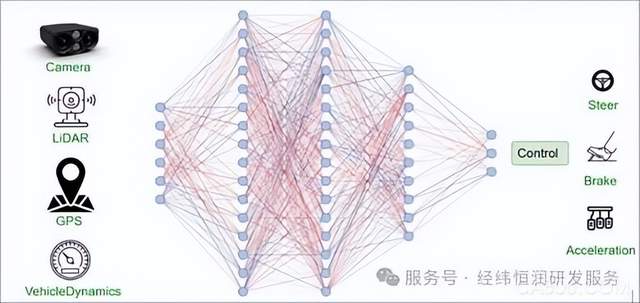
图 2 端到端辅助驾驶算法(图片来源网络)
算法测试需求
端到端辅助驾驶算法的黑盒特性决定了其需要更加全面和充分的测试,来增强算法的可靠性和安全性。算法的评测维度包括:
- 安全性:需要评估车辆在行驶过程中是否发生过碰撞,是否存在违反交通规则的行为,能否应对危险场景。
- 泛化能力:需要评估车辆在未训练过的场景中表现如何,能否处理多样化的场景特征,应对不同的天气、光照、交通情况。
- 鲁棒性:当系统出现故障后,需要评估功能能否顺利降级,维护车辆和人员的安全。
- 驾驶性能:在车辆行驶过程中,面对各种不同的场景,需要评估控制策略是否平滑,制动、加速、转向过程是否通过优化控制策略提升乘车人员舒适性,车速规划是否合理,通行效率是否满足主观要求。
算法测试解决方案
端到端辅助驾驶算法测试验证同样也需要基于数据驱动,解决方案主要分为开环测试和闭环测试两种。开环测试一般采用数据回灌的方法,将实车数据回灌给算法,通过将算法输出结果与实车对比,判断算法功能是否激活。算法级别开环测试不需要实时仿真,可以快速大批量测试。不过开环测试解决方案中,算法脱离了与环境的交互环节,无法评估算法的闭环功能是否正确,因此需要引入闭环测试解决方案。
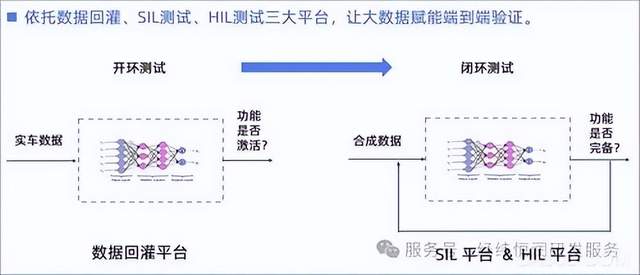
图 3 端到端辅助驾驶算法测试解决方案
闭环测试解决方案一般采用软件在环方案(SIL)和硬件在环方案(HIL),将仿真场景数据输入给算法,待算法响应后,再将算法输出指令作用于车辆动力学模型,实现算法与环境的交互,用于评估算法闭环功能是否正确。
软件在环(SIL)测试解决方案是一种基于代码级软件算法的闭环测试解决方案,将算法代码与环境模型集成,实现闭环测试。SIL系统能够便捷地实现并发测试,有效提升测试效率,能够更好地应对海量测试场景需求。
硬件在环(HIL)测试解决方案是一种基于真实控制器的闭环测试方案,将真实的控制器硬件与环境系统集成。HIL测试解决方案不仅能基于真实的硬件环境,验证算法功能,还支持模拟各种极限工况,充分检测芯片算力能否满足算法需求。
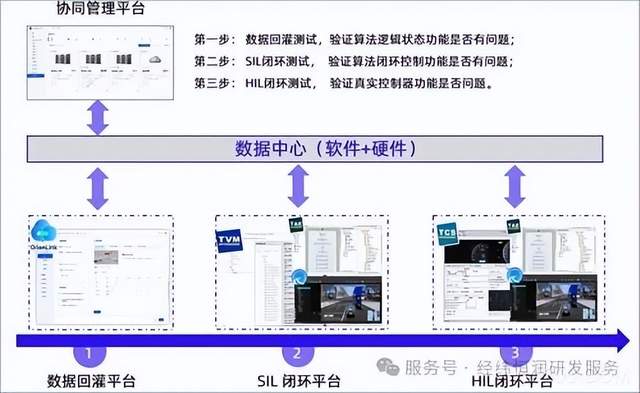
图 4 端到端辅助驾驶算法测试流程
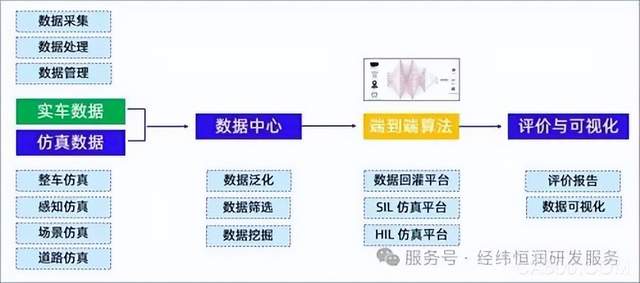
图 5 数据驱动端到端辅助算法测试
经纬恒润基于自主研发的工具链,可提供成熟的端到端辅助驾驶算法测试解决方案,具备数据回灌测试、SIL仿真测试、HIL仿真测试全栈技术能力,本期以SIL和HIL测试解决方案为主做简要介绍。
软件在环SIL测试解决方案
TVM是经纬恒润自主研发的一款SIL仿真软件平台,可将待测算法集成到TVM软件中,并集成整车模型、场景模型、感知模型,实现算法闭环功能测试。采用docker技术,将测试节点容器化,实现多节点并行仿真测试,加速算法的迭代验证。
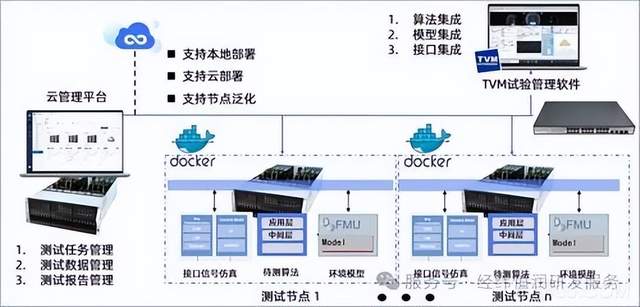
图 6 SIL 云泛化测试解决方案
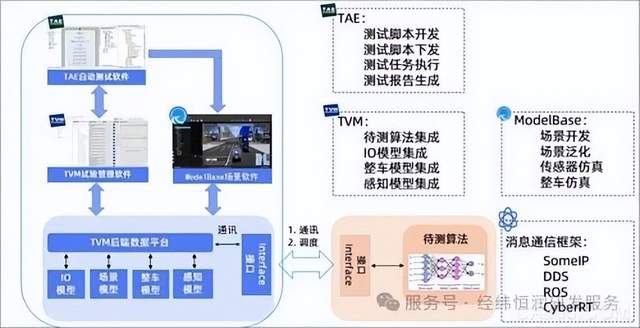
图 7 SIL单节点测试解决方案
硬件在环HIL测试解决方案
硬件在环HIL系统是一种集成真实控制器的闭环仿真测试系统,该系统集成了控制器硬件和与之交互的硬件板卡,基于实时的仿真环境,实现算法的闭环功能验证。硬件板卡包括用于摄像头仿真的视频注入板卡(以视频注入方案为例),用于超声波仿真的DSI3板卡(以DSI3协议仿真为例),用于激光雷达仿真的车载以太网板卡(以以太网协议仿真为例),以及整车通讯用的CAN、CANFD板卡和车载以太网板卡等。硬件在环HIL测试系统,可以完成基于控制器硬件的功能验证,包括控制器硬件接口、芯片算力、功能逻辑、功能安全和预期功能安全等。

图 8 HIL 测试解决方案
车辆动力学和场景仿真软件ModelBase介绍
端到端辅助驾驶算法的测试场景可细分为基础功能测试场景、泛化功能测试场景、极限功能测试场景和驾驶特性测试场景等。

图 9 端到端辅助驾驶算法测试场景需求
从算法输入的角度来说,场景的本质是数据,通过提供详尽的数据信息,可使得仿真测试实现更大价值。端到端辅助驾驶算法对数据需求主要分为四大类,分别为传感器数据、场景数据、道路数据和车辆数据,其中传感器数据又分为摄像头数据、激光雷达数据、毫米波雷达数据、超声波雷达数据、地图数据和GNSS&INS定位数据等。
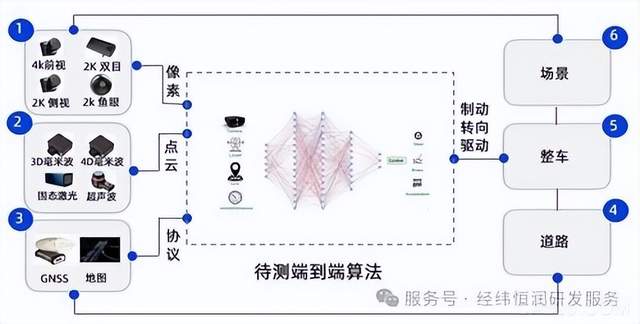
图 10 端到端辅助驾驶算法数据需求
ModelBase是经纬恒润自主研发的一款专业的车辆动力学和场景仿真软件,该软件实现了传感器仿真、道路仿真、场景仿真和车辆模型仿真的功能。基于该平台可以定制化实现不同车型对传感器的仿真需求、对海量场景的仿真需求,对道路的仿真需求,以及对车辆运动的仿真需求。

图 11 车辆动力学和场景仿真软件 ModelBase
测试案例介绍
SIL 仿真应用案例
国内某智驾公司的SIL测试应用案例,该项目采用了经纬恒润全栈自主研发的软件平台,主要包括试验管理软件TVM、车辆动力学和场景仿真软件ModelBase、自动化测试软件TAE,实现了组合驾驶辅助算法的SIL闭环仿真测试。

图 12 SIL 仿真应用案例
客户收益:
- SIL测试设备开发周期缩短为2个月,快速匹配软件开发阶段算法接口、功能闭环的测试需求。
- 实现了测试节点并发执行,显著提升测试效率。
- 通过ModelBase车辆动力学和场景仿真软件,灵活创建了各种罕见场景,采用场景泛化技术,提升了测试场景的覆盖度。
HIL仿真应用案例
国内某主机厂的HIL应用案例,该项目采用了经纬恒润自主研发的软硬件平台,主要包括经纬恒润TESTBASE实时仿真硬件系统、摄像头视频注入仿真模块、激光雷达点云仿真模块、毫米波雷达总线仿真模块、超声波雷达DSI3仿真模块、GPS&IMU总线仿真和地图仿真模块、车辆动力学和场景仿真软件ModelBase、试验管理软件TCS、自动测试执行软件TAE、故障注入软件EES和总线监控软件VBA等,实现了组合驾驶辅助的闭环仿真测试。

图 13 HIL 仿真应用案例
客户收益:
- 基于HIL硬件环境充分验证了控制器功能,加速了控制器研发进程;
- 实现了控制器的功能逻辑测试和功能安全测试;
- 基于HIL环境复现实车上的测试问题,并对问题点进行了泛化测试。
-
仿真测试
+关注
关注
0文章
103浏览量
11646 -
辅助驾驶
+关注
关注
1文章
325浏览量
15559 -
汽车测试
+关注
关注
1文章
108浏览量
9546
发布评论请先 登录
技术分享 |多模态自动驾驶混合渲染HRMAD:将NeRF和3DGS进行感知验证和端到端AD测试

端到端驾驶模型的发展历程
中兴通讯助力河北移动完成5GC网元和业务的端到端验证
HDR Vivid端到端产业链加速构建
基于矢量化场景表征的端到端自动驾驶算法框架



端到端自动驾驶技术研究与分析
经纬恒润端到端组合辅助驾驶算法测试解决方案

Momenta端到端飞轮大模型开启智能辅助驾驶行车体验
博世一段式端到端方案打造智能辅助驾驶体验
端到端发展趋势下,云算力如何赋能智能驾驶技术跃迁?






 工商网监
工商网监
评论