 24.5g 双模拟接口 专为小型无人飞行器设计的AI模块来了
24.5g 双模拟接口 专为小型无人飞行器设计的AI模块来了

模拟相机成本低、延迟低、便于安装操作的特点让其在小型无人飞行器领域有着广泛的市场。因此,我司针对这一相机选型的用户定制了一款专属的AI图像处理模块——Viztra-HS063。
模块采用RK3588s作为处理核心,具备四核Cortex-A76和四核Cortex-A55八核架构,主频达2.4GHz,集成6T算力NPU,支持8K@60fps视频解码与三屏异显输出,支持4G/5G扩展并配备WiFi/蓝牙通信模块及M.2固态硬盘扩展接口。

我司定制双模拟接口,植入公司自主研发的智能图像算法,基于输入的可见光或者红外的视频流,可实时对特定目标进行自主检测、识别,并自动或人为手动锁定、跟踪,同时输出目标相对于视野中心的脱靶量信息,实现对目标的实时跟踪功能。并且支持二次开发,方便快速集成。
功能特点
支持可见光、红外单路或者双路输入:
双路输入时可通过指令进行通道切换,选择处理通道。
AI 智能自主检测、识别:
基于AI 算法,可实现对视野内特定类型:人、车、船、飞机(含无人机)等目标的自主检测,返回目标类型、位置和目标大小等相关信息。
模型自主优化与部署:
基于配套AI 开发平台(SpeedDP)软件,支持客户进行自定义数据集的模型训练与一键式部署。
质心/形心跟踪、相关滤波跟踪、多目标跟踪、智能跟踪等多种目标跟踪算法:
弱干扰环境下的弱小目标检测与跟踪,如远距离下的无人机跟踪锁定;
AI识别支持的目标类型:人、车、船、飞机(无人机))目标的锁定过程进行实时检测与校准,提高跟踪精度与性能,解决目标形变、旋转、快速运动、快速变焦等场景下的跟踪丢失问题。
支持手动/自动锁定目标:
提供点选、框选、图像中心、十字丝中心、目标ID 等多种不同的锁定方式;
自动搜索检测视野内指定类型目标,检测目标后,自动转入锁定跟踪状态;
提供中心距离(目标到图像中心的像素距离)优先、置信度(目标得分)优先等不同的自动锁定策略;
完备的软件功能:
输出图像支持OSD 信息叠加,如:时间/日期、版本信息、目标框、十字丝、标尺、指北针、经纬度、偏航/俯仰角度等,且叠加信息支持显隐控制、颜色设置等个性配置;
支持主通道自由切换,多通道输出支持“画中画”形式;
支持板卡IP 查询与设置;
支持电子变倍,最大变倍倍数为16,最小变倍精度为0.1;
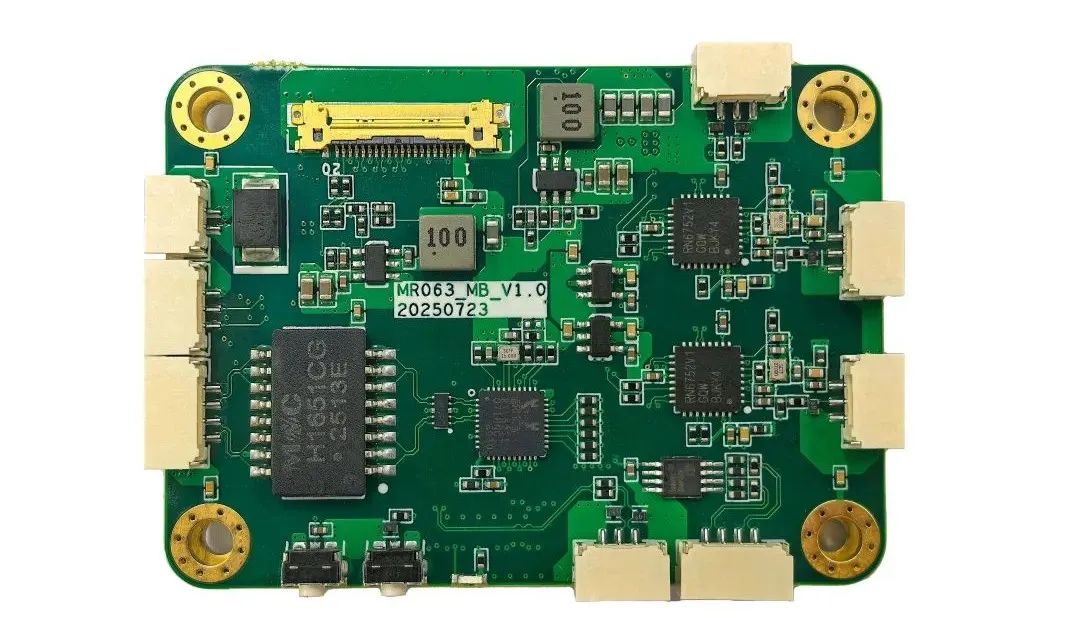
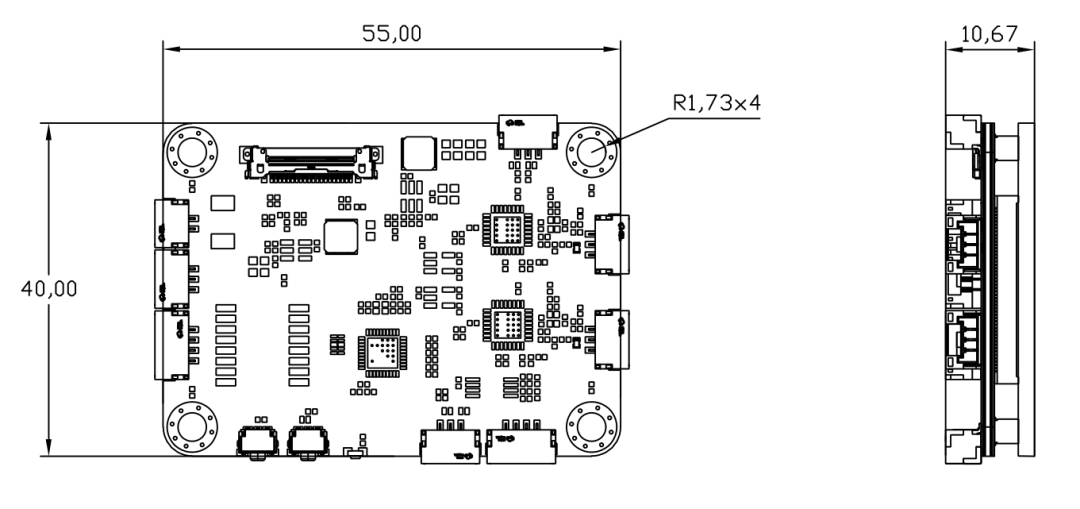
又小又好看
模块核心板和电源接口板通过B2B连接器连接,并使用铜柱将整套PCB 板固定,铜柱的最小高度为7.5mm,整体尺寸在55*40*10.67mm,重量控制在24.5g左右,小巧又精致。
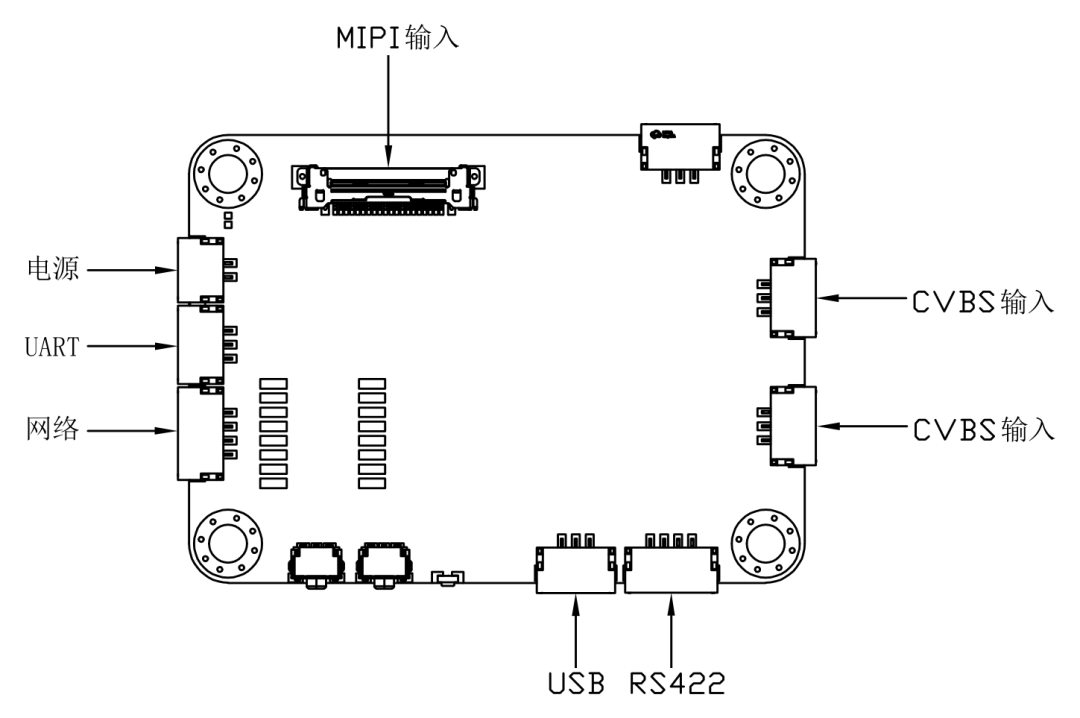
双模拟接口设计
模块支持1路MIPI + 2路CVBS视频输入,CVBS 为PAL 制,分辨率为720*576,帧率为:25Hz;MIPI 需对相机进行定制适配方可使用:连接器、线序及信号时序等;
输出接口支持网络视频流输出,视频流为压缩编码视频,默认H.264 编码,RTSP 推流,1080P@30Hz;支持指令配置为H.265 编码,UDP 推流,编码码率、I 帧间隔等参数可配置。
参数指标
性能指标 | |
跟踪帧率 | 60 Hz(随相机输入帧率,最高可支持到100Hz) |
最小跟踪目标 | 2×2 像素(质心跟踪) 8×8 像素(相关跟踪) |
跟踪精度 | ≤ 1 像素 |
跟踪速度 | ≥ 64 像素/帧 |
最小目标对比度(质心目标) | ≥ 5% |
最大跟踪目标数量(多目标跟踪) | ≤ 64 |
识别帧率 | 25 Hz |
最小识别目标 | 10×10 像素 |
识别性能(基于开源数据集:VisDrone2019-DET-test-dev) | 0.616(mAP@0.5) |
功能参数 | |
支持的跟踪算法 | 质心跟踪、相关跟踪、多目标跟踪、智能跟踪 |
支持的检测算法 | AI识别、质心搜索、模板匹配、运动目标检测 |
图像压缩编码格式 | H.264、H.265 |
视频流输出格式 | RTSP、UDP、RTMP、HLS等 |
视频流可配置参数 | 码率、I帧间隔、QP值 |
控制交互方式 | |
硬件接口/参数 | |
视频输入 | 1路 MIPI(需定制适配),2路 CVBS(PAL) |
视频输出 | 1路 网络 |
串口 | |
网络 | 1路 百兆网口(默认输出RTSP视频流) |
内存容量 | 32 G(可定制扩展) |
视频压缩存储能力 | ≥ 2h(码率4M) |
功耗 | < 6W |
工作电压 | 12V DC ± 2V |
外形尺寸 | 55mm×40mm |
环境适应性 | |
工作温度 | -20℃ ~ +60℃ |
存储温度 | -20℃ ~ +65℃ |
-
AI
+关注
关注
88文章
35900浏览量
282944 -
飞行器
+关注
关注
13文章
745浏览量
46584 -
模拟接口
+关注
关注
0文章
18浏览量
10508
发布评论请先 登录
RK3576赋能无人机巡检:多路视频+AI识别引领智能化变革
eVTOL低空飞行器电机为什么要用自粘结铁芯方案?
CES Asia 2025聚焦低空智能感知与空域管理,论坛开启行业新征程
Vicor高密度电源模块助力轻型飞行器设计
小型飞行器专用 AS-DR01模拟信号AI识别跟踪模块

《手把手教你做星闪无人机—KaihongOS星闪无人机开发实战》系列课程课件汇总

无人机低延时目标跟踪识别智算系统
激光毁伤系统:低空飞行器的 “隐形猎手”
SMPM小型锁扣连接器RF-Labs
MATLAB在低空飞行器中的应用






 工商网监
工商网监
评论